Data Structures | |
| class | _SwigNonDynamicMeta |
| class | AcquisitionControl |
| Category for the acquisition and trigger control features. More... | |
| class | ActionControl |
| Category that contains the Action control features. More... | |
| class | AnalogControl |
| Category that contains the Analog control features. More... | |
| class | AutoControlParameters |
| A class to control the automatic control parameters of a device(Device specific interface layout only). More... | |
| class | BasicDeviceSettings |
| A base class for essential device related settings. More... | |
| class | BasicDeviceSettingsWithAOI |
| A base class for camera related settings(Device specific interface layout only). More... | |
| class | BufferPart |
| Contains information about a specific part of a captured buffer. More... | |
| class | CameraDescriptionBase |
| A base class to describe a camera (Device specific interface layout only) connected to a frame grabber (deprecated. More... | |
| class | CameraDescriptionCameraLink |
| A class to describe a CameraLink® compliant camera(Device specific interface layout only) (deprecated. More... | |
| class | CameraDescriptionDigital |
| A class to describe a non-standard digital video signal(Device specific interface layout only) (deprecated. More... | |
| class | CameraDescriptionDigitalBase |
| A base class to describe an arbitrary digital camera signal(Device specific interface layout only) (deprecated. More... | |
| class | CameraDescriptionDigitalBase2 |
| A base class to describe an arbitrary digital camera signal(Device specific interface layout only) (deprecated. More... | |
| class | CameraDescriptionManager |
| Grants access to camera description objects(Device specific interface layout only) (deprecated. More... | |
| class | CameraDescriptionNonStandard |
| A class describing non-standard video cameras(Device specific interface layout only) (deprecated. More... | |
| class | CameraDescriptionSDI |
| A base class to describe an SDI(Serial Digital Interface) camera signal (Device specific interface layout only) (deprecated. More... | |
| class | CameraDescriptionStandard |
| A class describing analogue standard compliant video cameras(Device specific interface layout only) (deprecated. More... | |
| class | CameraDescriptionStandardBase |
| An internal base class to describe standard analogue video cameras(Device specific interface layout only) (deprecated. More... | |
| class | CameraSettingsBase |
| A base class for camera related settings(Device specific interface layout only). More... | |
| class | CameraSettingsBlueCOUGAR |
| mvBlueCOUGAR related camera settings (Device specific interface layout only). More... | |
| class | CameraSettingsBlueDevice |
| A base class for camera related settings belonging to the mvBlueXXX-series (Device specific interface layout only). More... | |
| class | CameraSettingsBlueFOX |
| mvBlueFOX related camera settings(Device specific interface layout only). More... | |
| class | CameraSettingsFrameGrabber |
| A class to access frame grabber related camera settings(Device specific interface layout only) (deprecated. More... | |
| class | CameraSettingsV4L2Device |
| mvV4L2 related camera settings(Device specific interface layout only). More... | |
| class | CameraSettingsVirtualDevice |
| mvVirtualDevice related camera settings(Device specific interface layout only). More... | |
| class | ChannelData |
| A structure for image buffer channel specific data Channel specific data in an image is data, that in e.g. More... | |
| class | ChunkDataControl |
| Category that contains the Chunk Data control features. More... | |
| class | ColorTransformationControl |
| Category that contains the Color Transformation control features. More... | |
| class | Component |
| A base class to implement access to internal driver components. More... | |
| class | ComponentAccess |
| A base class to implement access to internal driver objects. More... | |
| class | ComponentCallback |
| A simple helper class to wrap the creation of a callback object. More... | |
| class | ComponentCollection |
| A base class for sets of properties that can be modified by the user. More... | |
| class | ComponentList |
| A class to provide access to component lists. More... | |
| class | ComponentLocator |
| A class to locate components within the driver. More... | |
| class | ComponentLocatorBase |
| A base class to locate components within the driver. More... | |
| class | Connector |
| A class describing how a video signal source(e.g. More... | |
| class | CounterAndTimerControl |
| Category that contains the Counter and Timer control features. More... | |
| class | CustomCommandGenerator |
| Contains convenience functions to control features understood by a devices custom command interpreter. More... | |
| class | DataStreamModule |
| Category that contains items that belong to the data stream module of the transport layer. More... | |
| class | DepthControl |
| Adjustment and triggering of the depth image for 3D control. More... | |
| class | Device |
| This class and its functions represent an actual device detected by this interface in the current system. More... | |
| class | DeviceComponentLocator |
| A class to locate components within the driver. More... | |
| class | DeviceControl |
| Classes and functions that will be available if the device is used with the GenICam interface layout. More... | |
| class | DeviceManager |
| Grants access to devices that can be operated by this software interface. More... | |
| class | DeviceModule |
| Category contains items that belong to the device module of the transport layer. More... | |
| class | DigitalInput |
| A class to represent a digital input pin(Device specific interface layout only). More... | |
| class | DigitalIOControl |
| Category that contains the digital input and output control features. More... | |
| class | DigitalIOMeasurementControl |
| Properties for configuring settings belonging to the digital I/O measurement(Device specific interface layout only). More... | |
| class | DigitalOutput |
| A class to represent a digital output pin(Device specific interface layout only). More... | |
| class | ECantAccessData |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_LIST_CANT_ACCESS_DATA error. More... | |
| class | ECantAllocateNewList |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_CANT_ALLOCATE_LIST error. More... | |
| class | ECantRegisterComponent |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_CANT_REGISTER_COMPONENT error. More... | |
| class | ECantSerializeData |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_CANT_SERIALIZE_DATA error. More... | |
| class | EComponent |
| A base class for mvIMPACT.acquire.Component object related exceptions from the property module. More... | |
| class | EComponentIDInvalid |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_COMPONENT_ID_INVALID error. More... | |
| class | EComponentNotFound |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_COMPONENT_NOT_FOUND error. More... | |
| class | EDeviceManager |
| A base class for device manager related exceptions. More... | |
| class | EImplementationMissing |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_IMPLEMENTATION_MISSING error. More... | |
| class | EIncompatibleComponents |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_INCOMPATIBLE_COMPONENTS error. More... | |
| class | EInputBufferTooSmall |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_INPUT_BUFFER_TOO_SMALL error. More... | |
| class | EInvalidFileContent |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_INVALID_FILE_CONTENT error. More... | |
| class | EInvalidInputParameter |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_INVALID_INPUT_PARAMETER error. More... | |
| class | EInvalidListID |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_LIST_ID_INVALID error. More... | |
| class | EInvalidParameterList |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_METHOD_INVALID_PARAM_LIST error. More... | |
| class | EInvalidValue |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_INVALID_PROP_VALUE error. More... | |
| class | EInvalidValueType |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_INVALID_PROP_VALUE_TYPE error. More... | |
| class | EListEntryOccupied |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_LIST_ENTRY_OCCUPIED error. More... | |
| class | EMethod |
| A base class for mvIMPACT.acquire.Method object related exceptions from the property module. More... | |
| class | EMethodPtrInvalid |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_METHOD_PTR_INVALID error. More... | |
| class | EncoderControl |
| Category that contains the quadrature Encoder Control features. More... | |
| class | ENoModifySizeRights |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_NO_MODIFY_SIZE_RIGHTS error. More... | |
| class | ENoReadRights |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_NO_READ_RIGHTS error. More... | |
| class | ENotAList |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_NOT_A_LIST error. More... | |
| class | ENotAMethod |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_NOT_A_METHOD error. More... | |
| class | ENotAProperty |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_NOT_A_PROPERTY error. More... | |
| class | ENoWriteRights |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_NO_WRITE_RIGHTS error. More... | |
| class | EProperty |
| A base class for mvIMPACT.acquire.Property related exceptions from the property module. More... | |
| class | EPropertyHandling |
| A base class for exceptions related to the property module. More... | |
| class | EPropertyList |
| A base class for component list related exceptions from the property module. More... | |
| class | ESizeMismatch |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_SIZE_MISMATCH error. More... | |
| class | ETranslationTableCorrupted |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_PROP_TRANSLATION_TABLE_CORRUPTED error. More... | |
| class | ETranslationTableNotDefined |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_PROP_TRANSLATION_TABLE_NOT_DEFINED error. More... | |
| class | EUnsupportedOperation |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_UNSUPPORTED_OPERATION error. More... | |
| class | EUnsupportedParameter |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_UNSUPPORTED_PARAMETER error. More... | |
| class | EValidationFailed |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_PROP_VALIDATION_FAILED error. More... | |
| class | EValIDOutOfBounds |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_PROP_VAL_ID_OUT_OF_BOUNDS error. More... | |
| class | EValTooLarge |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_PROP_VAL_TOO_LARGE error. More... | |
| class | EValTooSmall |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_PROP_VAL_TOO_SMALL error. More... | |
| class | EventControl |
| Category that contains Event control features. More... | |
| class | EWrongParamCount |
| An exception thrown in case of a mvIMPACT.acquire.PROPHANDLING_WRONG_PARAM_COUNT error. More... | |
| class | ExceptionFactory |
| A factory class to raise Impact Acquire related exceptions. More... | |
| class | FileAccessControl |
| Category that contains the File Access control features. More... | |
| class | FirmwareUpdater |
| A class to perform a firmware update of a specific device. More... | |
| class | FullSettingsBase |
| A base class that provides access to the most common settings for a device. More... | |
| class | FunctionInterface |
| The function interface to devices supported by this interface. More... | |
| class | GainOffsetKneeChannelParameters |
| Properties for configuring settings belonging to a certain channel of the GainOffsetKnee filter. More... | |
| class | GenTLDriverConfigurator |
| A class that contains items to configure the behaviour of the GenICam GenTL driver stack. More... | |
| class | GenTLProducerConfiguration |
| A class that contains items to configure the behaviour of the GenICam GenTL driver stack. More... | |
| class | HDRControl |
| A class to control the HDR (High Dynamic Range) parameters of a device (Device specific interface layout only). More... | |
| class | HDRKneePoint |
| A class to configure a HDR (High Dynamic Range) knee point (Device specific interface layout only). More... | |
| class | I2CControl |
| Properties for accessing features belonging to the I2C control(Device specific interface layout only). More... | |
| class | ImageBuffer |
| Fully describes a captured image. More... | |
| class | ImageBufferDesc |
| A wrapper class to handle mvIMPACT.acquire.ImageBuffer structures. More... | |
| class | ImageDestination |
| Properties to define the format of resulting images. More... | |
| class | ImageDisplay |
| A class that can be used for displaying images within existing windows or GUI elements that can provide a window handle. More... | |
| class | ImageDisplayWindow |
| A class that can be used to display images in a window. More... | |
| class | ImageFormatControl |
| Category for Image Format Control features. More... | |
| class | ImageMemoryManager |
| An interface class to access DMA memory related properties(Device specific interface layout only). More... | |
| class | ImageProcessing |
| Base class for image processing related properties. More... | |
| class | ImageRequestControl |
| A helper class to control the way an image request will be processed. More... | |
| class | ImpactAcquireException |
| A base class for exceptions generated by Impact Acquire. More... | |
| class | Info |
| A base class to access various general information about the device and its driver. More... | |
| class | InfoBlueCOUGAR |
| A more specific class to query information about a mvBlueCOUGAR devices and its driver(Device specific interface layout only). More... | |
| class | InfoBlueDevice |
| A more specific class to query information about a mvBlueDevice device and its driver(Device specific interface layout only). More... | |
| class | InfoBlueFOX |
| A more specific class to query information about a mvBlueFOX device and its driver(Device specific interface layout only). More... | |
| class | InterfaceModule |
| Category that contains items that belong to the interface module of the transport layer. More... | |
| class | IOSubSystem |
| A base class to handle digital inputs and outputs(Device specific interface layout only). More... | |
| class | IOSubSystemBlueFOX |
| A class to handle the digital inputs and outputs for mvBlueFOX USB cameras(Device specific interface layout only). More... | |
| class | IOSubSystemCommon |
| A base class to handle the digital inputs and outputs for devices (Device specific interface layout only). More... | |
| class | IOSubSystemFrameGrabber |
| A class to handle the digital inputs and outputs for frame grabber devices(Device specific interface layout only) (deprecated. More... | |
| class | LightControl |
| Category containing the Lighting control features. More... | |
| class | LogicBlockControl |
| Category that contains the Logic Block control features. More... | |
| class | LUTControl |
| Category that includes the LUT control features. More... | |
| class | LUTParameters |
| Properties for configuring settings belonging to a certain LUT (Look Up Table) to be applied to a captured image. More... | |
| class | Method |
| A class to call arbitrary driver functions. More... | |
| class | MirrorParameters |
| Properties for configuring settings belonging to the mirror filter that processes a certain channel of a captured image. More... | |
| class | MotorFocusControl |
| Properties for configuring settings belonging to the motor focus control (Device specific interface layout only). More... | |
| class | mvAutoFeatureControl |
| Contains features to control the image controllers. More... | |
| class | mvCurrentControl |
| Category that contains features to control the devices Current Control parameters. More... | |
| class | mvDefectivePixelCorrectionControl |
| Contains features to control the device's defective pixel correction parameters. More... | |
| class | mvFFCControl |
| Contains features to control the devices Flat Field Correction parameters. More... | |
| class | mvFrameAverageControl |
| Category that contains features to control the frame averaging engine. More... | |
| class | mvHDRControl |
| Category that contains features to control the devices High Dynamic Range parameters. More... | |
| class | mvI2cInterfaceControl |
| Contains features to control the I2C interface. More... | |
| class | mvLensControl |
| Contains features to control motorized lenses Contains features to control motorized lenses. More... | |
| class | mvLogicGateControl |
| Category that contains features to control the devices Logic Gate Control parameters. More... | |
| class | mvSerialInterfaceControl |
| Contains features to control the serial interface. More... | |
| class | OpticControl |
| Category for optical control features. More... | |
| class | OutputSignalGeneratorBlueDevice |
| A class to create complex digital output signals(Device specific interface layout only). More... | |
| class | OutputSignalGeneratorFrameGrabber |
| A class to create complex digital output signals(Device specific interface layout only) (deprecated. More... | |
| class | pairstringdouble |
| class | pairstringint |
| class | pairstringint64_t |
| class | pairstringTAcquisitionField |
| class | pairstringTAcquisitionMode |
| class | pairstringTAcquisitionStartStopBehaviour |
| class | pairstringTAoiMode |
| class | pairstringTAutoControlMode |
| class | pairstringTAutoControlSpeed |
| class | pairstringTAutoExposureControl |
| class | pairstringTAutoGainControl |
| class | pairstringTAutoOffsetCalibration |
| class | pairstringTBayerConversionMode |
| class | pairstringTBayerMosaicParity |
| class | pairstringTBayerWhiteBalanceResult |
| class | pairstringTBlueFOXDigitalInputThreshold |
| class | pairstringTBlueFOXFooterMode |
| class | pairstringTBlueFOXInfoSensorCapabilities |
| class | pairstringTBlueFOXOffsetAutoBlackSpeed |
| class | pairstringTBlueFOXSensorTiming |
| class | pairstringTBlueFOXTransferSize |
| class | pairstringTBoolean |
| class | pairstringTBufferPartDataType |
| class | pairstringTCameraAoiMode |
| class | pairstringTCameraBinningMode |
| class | pairstringTCameraDataFormat |
| class | pairstringTCameraExposeMode |
| class | pairstringTCameraExternalSyncEdge |
| class | pairstringTCameraExternalSyncOutput |
| class | pairstringTCameraFlashMode |
| class | pairstringTCameraFlashType |
| class | pairstringTCameraHDRMode |
| class | pairstringTCameraInterlacedType |
| class | pairstringTCameraLinkDataValidMode |
| class | pairstringTCameraOutput |
| class | pairstringTCameraPixelClock |
| class | pairstringTCameraScanMode |
| class | pairstringTCameraSerialPortBaudRate |
| class | pairstringTCameraShutterMode |
| class | pairstringTCameraTapsXGeometry |
| class | pairstringTCameraTapsYGeometry |
| class | pairstringTCameraTestMode |
| class | pairstringTCameraTriggerMode |
| class | pairstringTCameraTriggerSource |
| class | pairstringTChannelSplitMode |
| class | pairstringTClampMode |
| class | pairstringTColorProcessingMode |
| class | pairstringTColorTwistInputCorrectionMatrixMode |
| class | pairstringTColorTwistOutputCorrectionMatrixMode |
| class | pairstringTDarkCurrentFilterMode |
| class | pairstringTDefectivePixelsFilterMode |
| class | pairstringTDeviceAccessMode |
| class | pairstringTDeviceAdvancedOptions |
| class | pairstringTDeviceCapability |
| class | pairstringTDeviceClass |
| class | pairstringTDeviceDigitalOutputMode |
| class | pairstringTDeviceImageTrigger |
| class | pairstringTDeviceInterfaceLayout |
| class | pairstringTDeviceLoadSettings |
| class | pairstringTDevicePowerMode |
| class | pairstringTDeviceScanRateMode |
| class | pairstringTDeviceSignalOutputStartEvent |
| class | pairstringTDeviceState |
| class | pairstringTDeviceSyncOutMode |
| class | pairstringTDeviceTriggerInterface |
| class | pairstringTDeviceTriggerMode |
| class | pairstringTDeviceTriggerOverlap |
| class | pairstringTDigIOState |
| class | pairstringTDigitalIOMeasurementMode |
| class | pairstringTDigitalIOMeasurementSource |
| class | pairstringTDigitalOutputControlMode |
| class | pairstringTDigitalSignal |
| class | pairstringTFieldGateMode |
| class | pairstringTFlatFieldFilterCorrectionMode |
| class | pairstringTFlatFieldFilterMode |
| class | pairstringTHWUpdateResult |
| class | pairstringTI2COperationMode |
| class | pairstringTI2COperationStatus |
| class | pairstringTImageBufferFormatReinterpreterMode |
| class | pairstringTImageBufferPixelFormat |
| class | pairstringTImageDestinationPixelFormat |
| class | pairstringTImageProcessingFilter |
| class | pairstringTImageProcessingMode |
| class | pairstringTImageProcessingOptimization |
| class | pairstringTImageProcessingResult |
| class | pairstringTImageRequestControlMode |
| class | pairstringTInfoSensorColorMode |
| class | pairstringTInfoSensorType |
| class | pairstringTInterfaceEnumerationBehaviour |
| class | pairstringTInterlacedMode |
| class | pairstringTLineCounter |
| class | pairstringTLUTGammaMode |
| class | pairstringTLUTImplementation |
| class | pairstringTLUTInterpolationMode |
| class | pairstringTLUTMapping |
| class | pairstringTLUTMode |
| class | pairstringTMemoryManagerMode |
| class | pairstringTMemoryManagerPoolMode |
| class | pairstringTMirrorMode |
| class | pairstringTMirrorOperationMode |
| class | pairstringTOnBoardMemoryMode |
| class | pairstringTPayloadType |
| class | pairstringTPolarizedDataExtractionInterpolationMode |
| class | pairstringTPolarizedDataExtractionMode |
| class | pairstringTPulseStartTrigger |
| class | pairstringTRequestImageMemoryMode |
| class | pairstringTRequestResult |
| class | pairstringTRequestState |
| class | pairstringTRTCtrlModes |
| class | pairstringTRTProgOpCodes |
| class | pairstringTScalerInterpolationMode |
| class | pairstringTScalerMode |
| class | pairstringTScanClock |
| class | pairstringTScanStandard |
| class | pairstringTTriggerMoment |
| class | pairstringTUserDataAccessRight |
| class | pairstringTUserDataReconnectBehaviour |
| class | pairstringTVideoStandard |
| class | pairstringTVirtualDeviceImageType |
| class | pairstringTVirtualDeviceTestMode |
| class | pairstringTWhiteBalanceCalibrationMode |
| class | pairstringTWhiteBalanceParameter |
| class | Property |
| A base class for properties. More... | |
| class | PropertyF |
| A template class to represent float properties and enumerated float properties. More... | |
| class | PropertyI |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyI64 |
| A template class to represent 64 bit integer properties and enumerated 64 bit integer properties. More... | |
| class | PropertyI64BayerMosaicParity |
| A template class to represent 64 bit integer properties and enumerated 64 bit integer properties. More... | |
| class | PropertyI64BufferPartDataType |
| A template class to represent 64 bit integer properties and enumerated 64 bit integer properties. More... | |
| class | PropertyI64DeviceTriggerOverlap |
| A template class to represent 64 bit integer properties and enumerated 64 bit integer properties. More... | |
| class | PropertyIAcquisitionField |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIAcquisitionMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIAcquisitionStartStopBehaviour |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIAoiMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIAutoControlMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIAutoControlSpeed |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIAutoExposureControl |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIAutoGainControl |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIAutoOffsetCalibration |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIBayerConversionMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIBayerMosaicParity |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIBayerWhiteBalanceResult |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIBlueFOXDigitalInputThreshold |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIBlueFOXFooterMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIBlueFOXInfoSensorCapabilities |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIBlueFOXOffsetAutoBlackSpeed |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIBlueFOXSensorTiming |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIBlueFOXTransferSize |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIBoolean |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraAoiMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraBinningMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraDataFormat |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraExposeMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraExternalSyncEdge |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraExternalSyncOutput |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraFlashMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraFlashType |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraHDRMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraInterlacedType |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraLinkDataValidMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraOutput |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraPixelClock |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraScanMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraSerialPortBaudRate |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraShutterMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraTapsXGeometry |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraTapsYGeometry |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraTestMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraTriggerMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyICameraTriggerSource |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIChannelSplitMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIClampMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIColorProcessingMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIColorTwistInputCorrectionMatrixMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIColorTwistOutputCorrectionMatrixMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDarkCurrentFilterMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDefectivePixelsFilterMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceAccessMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceAdvancedOptions |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceCapability |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceClass |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceDigitalOutputMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceImageTrigger |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceInterfaceLayout |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceLoadSettings |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDevicePowerMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceScanRateMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceSignalOutputStartEvent |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceState |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceSyncOutMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceTriggerInterface |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDeviceTriggerMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDigIOState |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDigitalIOMeasurementMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDigitalIOMeasurementSource |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDigitalOutputControlMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIDigitalSignal |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIFieldGateMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIFlatFieldFilterCorrectionMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIFlatFieldFilterMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIHWUpdateResult |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyII2COperationMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyII2COperationStatus |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIImageBufferFormatReinterpreterMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIImageBufferPixelFormat |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIImageDestinationPixelFormat |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIImageProcessingFilter |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIImageProcessingMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIImageProcessingOptimization |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIImageProcessingResult |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIImageRequestControlMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIInfoSensorColorMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIInfoSensorType |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIInterfaceEnumerationBehaviour |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIInterlacedMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyILineCounter |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyILUTGammaMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyILUTImplementation |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyILUTInterpolationMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyILUTMapping |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyILUTMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIMemoryManagerMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIMemoryManagerPoolMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIMirrorMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIMirrorOperationMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIOnBoardMemoryMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIPayloadType |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIPolarizedDataExtractionInterpolationMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIPolarizedDataExtractionMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIPulseStartTrigger |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIRequestImageMemoryMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIRequestResult |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIRequestState |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIRTCtrlModes |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIRTProgOpCodes |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIScalerInterpolationMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIScalerMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIScanClock |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIScanStandard |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyITriggerMoment |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIUserDataAccessRight |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIUserDataReconnectBehaviour |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIVideoStandard |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIVirtualDeviceImageType |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIVirtualDeviceTestMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIWhiteBalanceCalibrationMode |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyIWhiteBalanceParameter |
| A template class to represent 32 bit integer properties and 32 bit enumerated integer properties. More... | |
| class | PropertyPtr |
| A class to represent pointer properties. More... | |
| class | PropertyS |
| A class to represent string properties. More... | |
| class | PulseStartConfiguration |
| A class to configure the creation of digital signals passed to one or more of the digital outputs of a device(Device specific interface layout only). More... | |
| class | Request |
| Contains information about a captured buffer. More... | |
| class | RequestFactory |
| A default request factory. More... | |
| class | RequestInfoConfiguration |
| Properties to configure which information shall be attached to the resulting images. More... | |
| class | RTCtrProgram |
| A class to represent real time control programs(Device specific interface layout only). More... | |
| class | RTCtrProgramStep |
| A class to represent one step of a real time control(RTCtr) program (Device specific interface layout only). More... | |
| class | Scan3dControl |
| Category for control of 3D camera specific features. More... | |
| class | SequencerControl |
| Category for the Sequencer Control features. More... | |
| class | SettingsBlueFOX |
| This class provides access to general settings as well as to settings which are unique for the mvBlueFOX(Device specific interface layout only). More... | |
| class | SoftwareSignalControl |
| Category that contains the Software Signal Control features. More... | |
| class | SourceControl |
| Category that contains the source control features. More... | |
| class | Statistics |
| Contains basic statistical information. More... | |
| class | SwigPyIterator |
| class | SyncOutput |
| A class to represent a sync. More... | |
| class | SystemBlueFOX |
| A class containing mvBlueFOX specific settings to control the overall behaviour of the driver(Device specific interface layout only). More... | |
| class | SystemModule |
| Category that contains items that belong to the system module of the transport layer. More... | |
| class | SystemSettings |
| A base class for accessing settings that control the overall behaviour of a device driver. More... | |
| class | SystemV4L2 |
| A class containing mvV4L2 specific settings to control the overall behaviour of the driver(Device specific interface layout only). More... | |
| class | TestControl |
| Category for Test Control features. More... | |
| class | TransferControl |
| Category for the data Transfer Control features. More... | |
| class | TransportLayerControl |
| Category that contains the transport Layer control features. More... | |
| class | TriggerControl |
| A class to configure the behaviour of trigger signals. More... | |
| class | UserData |
| A helper class to work with the device specific non-volatile memory(if available). More... | |
| class | UserDataEntry |
| A helper class that represents one entry in the devices non-volatile memory (if available). More... | |
| class | UserSetControl |
| Category that contains the User Set control features. More... | |
| class | VideoStream |
| A class to create compressed video stream from images captured or loaded using the Impact Acquire API. More... | |
| class | VideoStreamPauseScope |
| A smaller helper class for pausing a video stream for a defined time. More... | |
| class | WhiteBalancer |
| Convenience class to provide an easy way for a more precise white balance calibration. More... | |
| class | WhiteBalanceSettings |
| Properties for adjusting the colors during a Bayer conversion. More... | |
Functions | |
| _swig_add_metaclass (metaclass) | |
| _swig_repr (self) | |
| _swig_setattr_nondynamic_class_variable (set) | |
| _swig_setattr_nondynamic_instance_variable (set) | |
Variables | |
| acmDeviceSpecific = lib_mvIMPACT_acquire.acmDeviceSpecific | |
| A device specific auto control mode. | |
| acmStandard = lib_mvIMPACT_acquire.acmStandard | |
| The standard auto control mode. | |
| acsFast = lib_mvIMPACT_acquire.acsFast | |
| The controller will converge fast to the desired value. | |
| acsMedium = lib_mvIMPACT_acquire.acsMedium | |
| The controller will converge to the desired value at medium speed. | |
| acsSlow = lib_mvIMPACT_acquire.acsSlow | |
| The controller will converge slowly to the desired value. | |
| acsUserDefined = lib_mvIMPACT_acquire.acsUserDefined | |
| In this mode the user can control the behaviour of the closed loop(control circuit). | |
| aecOff = lib_mvIMPACT_acquire.aecOff | |
| AEC is switched off. | |
| aecOn = lib_mvIMPACT_acquire.aecOn | |
| AEC is switched on. | |
| afAny = lib_mvIMPACT_acquire.afAny | |
| Odd and even fields will be digitised. | |
| afAuto = lib_mvIMPACT_acquire.afAuto | |
| Controlled by the camera parameter. | |
| afEven = lib_mvIMPACT_acquire.afEven | |
| Only even fields will be digitised. | |
| afOdd = lib_mvIMPACT_acquire.afOdd | |
| Only odd fields will be digitised. | |
| agcOff = lib_mvIMPACT_acquire.agcOff | |
| AGC is switched off. | |
| agcOn = lib_mvIMPACT_acquire.agcOn | |
| AGC is switched on. | |
| amCentered = lib_mvIMPACT_acquire.amCentered | |
| Use a small centered window for image processing. | |
| amContinuous = lib_mvIMPACT_acquire.amContinuous | |
| Continuous mode. | |
| amFull = lib_mvIMPACT_acquire.amFull | |
| Use the complete image for image processing. | |
| amMultiFrame = lib_mvIMPACT_acquire.amMultiFrame | |
| In this mode AcquisitionFrameCount images will transferred by the device. | |
| amSingleFrame = lib_mvIMPACT_acquire.amSingleFrame | |
| In this mode the device always will always just send a single image when a data stream is started. | |
| amUseAoi = lib_mvIMPACT_acquire.amUseAoi | |
| Use a user defined AOI window for image processing. | |
| aocOff = lib_mvIMPACT_acquire.aocOff | |
| The automatic offset calibration is switched off. | |
| aocOn = lib_mvIMPACT_acquire.aocOn | |
| The automatic offset calibration is switched on. | |
| assbDefault = lib_mvIMPACT_acquire.assbDefault | |
| The default behaviour for acquisition start and stop. | |
| assbUser = lib_mvIMPACT_acquire.assbUser | |
| The user can control the start and stop of the data transfer from the device. | |
| bcmAdaptiveEdgeSensing = lib_mvIMPACT_acquire.bcmAdaptiveEdgeSensing | |
| Adaptive edge sensing. | |
| bcmAdaptiveEdgeSensingPlus = lib_mvIMPACT_acquire.bcmAdaptiveEdgeSensingPlus | |
| Adaptive edge sensing plus. | |
| bcmAdaptiveHomogeneityDirected = lib_mvIMPACT_acquire.bcmAdaptiveHomogeneityDirected | |
| Adaptive edge sensing plus. | |
| bcmAuto = lib_mvIMPACT_acquire.bcmAuto | |
| Auto. | |
| bcmLinearInterpolation = lib_mvIMPACT_acquire.bcmLinearInterpolation | |
| Linear interpolation. | |
| bcmLinearPacked = lib_mvIMPACT_acquire.bcmLinearPacked | |
| Linear Packed. | |
| bcmPacked = lib_mvIMPACT_acquire.bcmPacked | |
| Packed. | |
| bFalse = lib_mvIMPACT_acquire.bFalse | |
| Off, false or logical low. | |
| bfdit10V = lib_mvIMPACT_acquire.bfdit10V | |
| This input is assumed as logic '1' when the voltage applied to the input lies above about 10 Volts. | |
| bfdit2V = lib_mvIMPACT_acquire.bfdit2V | |
| This input is assumed as logic '1' when the voltage applied to the input lies above about 2 Volts. | |
| bffm512B = lib_mvIMPACT_acquire.bffm512B | |
| A long 512 Byte footer. | |
| bffm64B = lib_mvIMPACT_acquire.bffm64B | |
| A 64 Byte footer (standard). | |
| bffmOff = lib_mvIMPACT_acquire.bffmOff | |
| No footer. | |
| bfiscAutoControlAOI = lib_mvIMPACT_acquire.bfiscAutoControlAOI | |
| This sensor supports to define an AOI for the AGC/AEC/AOC(Auto Offset Control) features. | |
| bfiscAutoControlDelay = lib_mvIMPACT_acquire.bfiscAutoControlDelay | |
| This sensor supports to define a delay for the AGC/AEC/AOC(Auto Offset Control) features. | |
| bfiscAutoControlSpeed = lib_mvIMPACT_acquire.bfiscAutoControlSpeed | |
| This sensor supports to define the control speed for the AGC/AEC/AOC(Auto Offset Control) features. | |
| bfiscAutoOffsetBlackLevel = lib_mvIMPACT_acquire.bfiscAutoOffsetBlackLevel | |
| This sensor supports Auto Offset Black Level. | |
| bfiscBinning = lib_mvIMPACT_acquire.bfiscBinning | |
| This sensor supports binning. | |
| bfiscExposeToFlashDelay = lib_mvIMPACT_acquire.bfiscExposeToFlashDelay | |
| This sensor supports Expose To Flash Delay. | |
| bfiscExposure = lib_mvIMPACT_acquire.bfiscExposure | |
| The exposure time can be controlled by an application. | |
| bfiscExposureAuto = lib_mvIMPACT_acquire.bfiscExposureAuto | |
| This sensor can automatically control the exposure time. | |
| bfiscFlash = lib_mvIMPACT_acquire.bfiscFlash | |
| This sensor can output the 'exposure active' signal(e.g. | |
| bfiscFrameDelay = lib_mvIMPACT_acquire.bfiscFrameDelay | |
| This sensor supports frame delay. | |
| bfiscFrameRate = lib_mvIMPACT_acquire.bfiscFrameRate | |
| This sensor supports FrameRate_Hz. | |
| bfiscGain = lib_mvIMPACT_acquire.bfiscGain | |
| The gain can be controlled by an application. | |
| bfiscGainAuto = lib_mvIMPACT_acquire.bfiscGainAuto | |
| This sensor can automatically control the gain. | |
| bfiscLineDelay = lib_mvIMPACT_acquire.bfiscLineDelay | |
| This sensor supports line delay. | |
| bfiscLineTrigger = lib_mvIMPACT_acquire.bfiscLineTrigger | |
| This sensor supports line triggered acquisition. | |
| bfiscNone = lib_mvIMPACT_acquire.bfiscNone | |
| A dummy constant to indicate, that this device does not have any capabilities defined by other constants belonging to this enumeration. | |
| bfiscOffset = lib_mvIMPACT_acquire.bfiscOffset | |
| The offset can be controlled by an application. | |
| bfiscOffsetAuto = lib_mvIMPACT_acquire.bfiscOffsetAuto | |
| This sensor can automatically control the offset. | |
| bfiscOverlappedExposure = lib_mvIMPACT_acquire.bfiscOverlappedExposure | |
| This sensor supports overlapped exposure. | |
| bfiscReverseX = lib_mvIMPACT_acquire.bfiscReverseX | |
| This sensor supports ReverseX. | |
| bfiscReverseY = lib_mvIMPACT_acquire.bfiscReverseY | |
| This sensor supports ReverseY. | |
| bfiscShadingCorrection = lib_mvIMPACT_acquire.bfiscShadingCorrection | |
| This sensor can perform shading correction. | |
| bfiscTemperatureSensor = lib_mvIMPACT_acquire.bfiscTemperatureSensor | |
| This sensor supports a temperature sensor within the imager. | |
| bfiscTrigger = lib_mvIMPACT_acquire.bfiscTrigger | |
| This sensor supports triggered acquisition. | |
| bfoablFast = lib_mvIMPACT_acquire.bfoablFast | |
| Fast Setting. | |
| bfoablFastest = lib_mvIMPACT_acquire.bfoablFastest | |
| Fastest Setting. | |
| bfoablMedium = lib_mvIMPACT_acquire.bfoablMedium | |
| Medium Setting. | |
| bfoablSlow = lib_mvIMPACT_acquire.bfoablSlow | |
| Slow Setting. | |
| bfoablSlowest = lib_mvIMPACT_acquire.bfoablSlowest | |
| Slowest Setting. | |
| bfoablVeryFast = lib_mvIMPACT_acquire.bfoablVeryFast | |
| Very fast Setting. | |
| bfoablVerySlow = lib_mvIMPACT_acquire.bfoablVerySlow | |
| Very slow Setting. | |
| bfstFastLineSkip = lib_mvIMPACT_acquire.bfstFastLineSkip | |
| Fast line skip timing. | |
| bfstLowSmearLineSkip = lib_mvIMPACT_acquire.bfstLowSmearLineSkip | |
| This mode is not available for every mvBlueFOX camera. | |
| bfstStandard = lib_mvIMPACT_acquire.bfstStandard | |
| Standard Timing. | |
| bfts1024KB = lib_mvIMPACT_acquire.bfts1024KB | |
| 1024KB blocks. | |
| bfts128KB = lib_mvIMPACT_acquire.bfts128KB | |
| 128KB blocks. | |
| bfts16KB = lib_mvIMPACT_acquire.bfts16KB | |
| 16KB blocks. | |
| bfts2048KB = lib_mvIMPACT_acquire.bfts2048KB | |
| 2048KB blocks. | |
| bfts256KB = lib_mvIMPACT_acquire.bfts256KB | |
| 256KB blocks. | |
| bfts32KB = lib_mvIMPACT_acquire.bfts32KB | |
| 32KB blocks. | |
| bfts512KB = lib_mvIMPACT_acquire.bfts512KB | |
| 512KB blocks. | |
| bfts64KB = lib_mvIMPACT_acquire.bfts64KB | |
| 64KB blocks. | |
| bmpBG = lib_mvIMPACT_acquire.bmpBG | |
| The buffer or image starts with a green-blue line starting with a blue pixel. | |
| bmpGB = lib_mvIMPACT_acquire.bmpGB | |
| The buffer or image starts with a green-blue line starting with a green pixel. | |
| bmpGR = lib_mvIMPACT_acquire.bmpGR | |
| The buffer or image starts with a green-red line starting with a green pixel. | |
| bmpRG = lib_mvIMPACT_acquire.bmpRG | |
| The buffer or image starts with a green-red line starting with a red pixel. | |
| bmpUndefined = lib_mvIMPACT_acquire.bmpUndefined | |
| It is not known whether the buffer or image contains raw Bayer data or the buffer or image does NOT contain raw Bayer data. | |
| bpdt2DImage = lib_mvIMPACT_acquire.bpdt2DImage | |
| Color or monochrome (2D) image (GenTL). | |
| bpdt2DPlaneBiplanar = lib_mvIMPACT_acquire.bpdt2DPlaneBiplanar | |
| Single color plane of a planar (2D) image (GenTL). | |
| bpdt2DPlaneQuadplanar = lib_mvIMPACT_acquire.bpdt2DPlaneQuadplanar | |
| Single color plane of a planar (2D) image (GenTL). | |
| bpdt2DPlaneTriplanar = lib_mvIMPACT_acquire.bpdt2DPlaneTriplanar | |
| Single color plane of a planar (2D) image (GenTL). | |
| bpdt3DImage = lib_mvIMPACT_acquire.bpdt3DImage | |
| 3D image (pixel coordinates) (GenTL). | |
| bpdt3DPlaneBiplanar = lib_mvIMPACT_acquire.bpdt3DPlaneBiplanar | |
| Single color plane of a planar (3D) image (GenTL). | |
| bpdt3DPlaneQuadplanar = lib_mvIMPACT_acquire.bpdt3DPlaneQuadplanar | |
| Single color plane of a planar (3D) image (GenTL). | |
| bpdt3DPlaneTriplanar = lib_mvIMPACT_acquire.bpdt3DPlaneTriplanar | |
| Single color plane of a planar (3D) image (GenTL). | |
| bpdtConfidenceMap = lib_mvIMPACT_acquire.bpdtConfidenceMap | |
| Confidence of the individual pixel values (GenTL). | |
| bpdtGDC_2DImage = lib_mvIMPACT_acquire.bpdtGDC_2DImage | |
| Color or monochrome (2D) image (GenDC). | |
| bpdtGDC_GenICamChunkData = lib_mvIMPACT_acquire.bpdtGDC_GenICamChunkData | |
| Chunk data (GenDC). | |
| bpdtGDC_GenICamXML = lib_mvIMPACT_acquire.bpdtGDC_GenICamXML | |
| GenICam XML data (GenDC). | |
| bpdtGDC_H264 = lib_mvIMPACT_acquire.bpdtGDC_H264 | |
| A H.264 buffer (GenDC). | |
| bpdtGDC_JPEG = lib_mvIMPACT_acquire.bpdtGDC_JPEG | |
| JPEG image data (GenDC). | |
| bpdtGDC_JPEG2000 = lib_mvIMPACT_acquire.bpdtGDC_JPEG2000 | |
| JPEG 2000 image data (GenDC). | |
| bpdtGenICamChunkData = lib_mvIMPACT_acquire.bpdtGenICamChunkData | |
| Chunk data (GenTL). | |
| bpdtJPEG = lib_mvIMPACT_acquire.bpdtJPEG | |
| JPEG image data (GenTL). | |
| bpdtJPEG2000 = lib_mvIMPACT_acquire.bpdtJPEG2000 | |
| JPEG 2000 image data (GenTL). | |
| bpdtUnknown = lib_mvIMPACT_acquire.bpdtUnknown | |
| The framework is not aware of the data type of the data in the provided buffer part. | |
| bTrue = lib_mvIMPACT_acquire.bTrue | |
| On, true or logical high. | |
| bwbrErrorTooBright = lib_mvIMPACT_acquire.bwbrErrorTooBright | |
| The previous white balance calibration failed because the reference image used for the calibration was too bright. | |
| bwbrErrorTooDark = lib_mvIMPACT_acquire.bwbrErrorTooDark | |
| The previous white balance calibration failed because the reference image used for the calibration was too dark. | |
| bwbrErrorUnknown = lib_mvIMPACT_acquire.bwbrErrorUnknown | |
| An unknown error occurred during the white balance calibration for the selected setting. | |
| bwbrOK = lib_mvIMPACT_acquire.bwbrOK | |
| The white balance calibration has been performed successfully for the selected setting. | |
| bwbrUnknown = lib_mvIMPACT_acquire.bwbrUnknown | |
| No white balance calibration has been performed since start up. | |
| camFull = lib_mvIMPACT_acquire.camFull | |
| Use the complete AOI window defined by the hardware or input data (sensor, camera). | |
| camUser = lib_mvIMPACT_acquire.camUser | |
| Use a user defined AOI window. | |
| cbmBinning3H = lib_mvIMPACT_acquire.cbmBinning3H | |
| Horizontal Binning (combines 4 adjacent columns). | |
| cbmBinning3H3V = lib_mvIMPACT_acquire.cbmBinning3H3V | |
| Combines mvIMPACT.acquire.cbmBinning3H and mvIMPACT.acquire.cbmBinning3V. | |
| cbmBinning3H3VAvg = lib_mvIMPACT_acquire.cbmBinning3H3VAvg | |
| Combines mvIMPACT.acquire.cbmBinning3H and mvIMPACT.acquire.cbmBinning3V. | |
| cbmBinning3HAvg = lib_mvIMPACT_acquire.cbmBinning3HAvg | |
| Horizontal Binning with average (combines 4 adjacent columns and averages the result). | |
| cbmBinning3V = lib_mvIMPACT_acquire.cbmBinning3V | |
| Vertical Binning (combines 4 adjacent rows). | |
| cbmBinning3VAvg = lib_mvIMPACT_acquire.cbmBinning3VAvg | |
| Vertical Binning with average (combines 4 adjacent rows and averages the result). | |
| cbmBinningH = lib_mvIMPACT_acquire.cbmBinningH | |
| Horizontal Binning (combines 2 adjacent columns). | |
| cbmBinningHAvg = lib_mvIMPACT_acquire.cbmBinningHAvg | |
| Horizontal Binning with average (combines 2 adjacent columns and averages the result). | |
| cbmBinningHV = lib_mvIMPACT_acquire.cbmBinningHV | |
| Combines mvIMPACT.acquire.cbmBinningH and mvIMPACT.acquire.cbmBinningV. | |
| cbmBinningHVAvg = lib_mvIMPACT_acquire.cbmBinningHVAvg | |
| Combines mvIMPACT.acquire.cbmBinningH and mvIMPACT.acquire.cbmBinningV. | |
| cbmBinningV = lib_mvIMPACT_acquire.cbmBinningV | |
| Vertical Binning (combines 2 adjacent rows). | |
| cbmBinningVAvg = lib_mvIMPACT_acquire.cbmBinningVAvg | |
| Vertical Binning with average (combines 2 adjacent rows and averages the result). | |
| cbmDropping3H = lib_mvIMPACT_acquire.cbmDropping3H | |
| Horizontal Dropping (drops 3 adjacent columns out of 4). | |
| cbmDropping3H3V = lib_mvIMPACT_acquire.cbmDropping3H3V | |
| Combines mvIMPACT.acquire.cbmDropping3H and mvIMPACT.acquire.cbmDropping3V. | |
| cbmDropping3V = lib_mvIMPACT_acquire.cbmDropping3V | |
| Vertical Binning (drops 3 adjacent rows out of 4). | |
| cbmDroppingH = lib_mvIMPACT_acquire.cbmDroppingH | |
| Horizontal Dropping (drops every second column). | |
| cbmDroppingHV = lib_mvIMPACT_acquire.cbmDroppingHV | |
| Combines mvIMPACT.acquire.cbmDroppingH and mvIMPACT.acquire.cbmDroppingV. | |
| cbmDroppingV = lib_mvIMPACT_acquire.cbmDroppingV | |
| Vertical Dropping (drops every second row). | |
| cbmOff = lib_mvIMPACT_acquire.cbmOff | |
| No Binning. | |
| cdfBayer = lib_mvIMPACT_acquire.cdfBayer | |
| This is a Bayer format. | |
| cdfBayerPacked = lib_mvIMPACT_acquire.cdfBayerPacked | |
| This is a Bayer Packed format. | |
| cdfMono = lib_mvIMPACT_acquire.cdfMono | |
| This is a mono data format. | |
| cdfRGB = lib_mvIMPACT_acquire.cdfRGB | |
| This is a RGB format. | |
| cdfUnknown = lib_mvIMPACT_acquire.cdfUnknown | |
| This is an unknown type. | |
| cdfYUV = lib_mvIMPACT_acquire.cdfYUV | |
| This is a YUV format. | |
| cemNoShutter = lib_mvIMPACT_acquire.cemNoShutter | |
| 'No shutter' mode, switch off exposure control. | |
| cemOverlapped = lib_mvIMPACT_acquire.cemOverlapped | |
| Overlapped mode, expose during image readout. | |
| cemStandard = lib_mvIMPACT_acquire.cemStandard | |
| Standard sequential mode. | |
| ceseFallingEdge = lib_mvIMPACT_acquire.ceseFallingEdge | |
| ceseNo = lib_mvIMPACT_acquire.ceseNo | |
| ceseRisingEdge = lib_mvIMPACT_acquire.ceseRisingEdge | |
| cesoAuto = lib_mvIMPACT_acquire.cesoAuto | |
| The sync signal is expected on the selected video channel. | |
| cesoBlue = lib_mvIMPACT_acquire.cesoBlue | |
| The sync signal is expected on the third ('blue') video channel ( mvTITAN-RGB only ). | |
| cesoExtern = lib_mvIMPACT_acquire.cesoExtern | |
| The sync signal is expected on the fourth ('extern') video channel ( mvTITAN-RGB only ). | |
| cesoGreen = lib_mvIMPACT_acquire.cesoGreen | |
| The sync signal is expected on the second ('green') video channel ( mvTITAN-RGB only ). | |
| cesoRed = lib_mvIMPACT_acquire.cesoRed | |
| The sync signal is expected on the first ('red') video channel ( mvTITAN-RGB only ). | |
| cfAllowValueCombinations = lib_mvIMPACT_acquire.cfAllowValueCombinations | |
| Allows combinations of translation dictionary entry as valid values. | |
| cfAlwaysForceClone = lib_mvIMPACT_acquire.cfAlwaysForceClone | |
| If set this component is always cloned completely. | |
| cfAlwaysForceUpdate = lib_mvIMPACT_acquire.cfAlwaysForceUpdate | |
| This feature will ALWAYS execute internal update callbacks and will treat each write attempt to this feature as a value different from the current one. | |
| cfContainsBinaryData = lib_mvIMPACT_acquire.cfContainsBinaryData | |
| Specifies a property, which contains binary data. | |
| cfDisallowSerialize = lib_mvIMPACT_acquire.cfDisallowSerialize | |
| If set this component or derived components can't be stored as external data. | |
| cfFixedSize = lib_mvIMPACT_acquire.cfFixedSize | |
| This components element count can be modified. | |
| cfInvisible = lib_mvIMPACT_acquire.cfInvisible | |
| The component is shadowed by other settings currently if set. | |
| cfmDigout0 = lib_mvIMPACT_acquire.cfmDigout0 | |
| Output 0 will be active during the exposure period. | |
| cfmDigout1 = lib_mvIMPACT_acquire.cfmDigout1 | |
| Output 1 will be active during the exposure period. | |
| cfmOff = lib_mvIMPACT_acquire.cfmOff | |
| Do not use the cameras flash output. | |
| cfNotAvailable = lib_mvIMPACT_acquire.cfNotAvailable | |
| If set, this component is currently not available due to the setting of another feature. | |
| cfNotImplemented = lib_mvIMPACT_acquire.cfNotImplemented | |
| If set, this feature has been defined, but so far has not been implemented. | |
| cfReadAccess = lib_mvIMPACT_acquire.cfReadAccess | |
| This component can be accessed for reading. | |
| cfRWAccess = lib_mvIMPACT_acquire.cfRWAccess | |
| This component can be accessed for both reading and writing. | |
| cfShouldBeDisplayedAsEnumeration = lib_mvIMPACT_acquire.cfShouldBeDisplayedAsEnumeration | |
| Informs a displaying GUI that this component should be displayed as an enumeration(e.g. | |
| cfShouldBeDisplayedAsList = lib_mvIMPACT_acquire.cfShouldBeDisplayedAsList | |
| Informs a displaying GUI that this component should be displayed as a list. | |
| cftRollingShutterFlash = lib_mvIMPACT_acquire.cftRollingShutterFlash | |
| Flash signal is only on during the time all lines of a rolling shutter sensor are exposed. | |
| cftStandard = lib_mvIMPACT_acquire.cftStandard | |
| Flash signal is on while the shutter is open on a frame shutter sensor or during the complete exposure period of a rolling shutter sensor. | |
| cftVSync = lib_mvIMPACT_acquire.cftVSync | |
| Flash signal is derived from the sensors internal VSync (Frame-sync. | |
| cfUndefined = lib_mvIMPACT_acquire.cfUndefined | |
| This is used to define an inconsistent/invalid flag. | |
| cfWriteAccess = lib_mvIMPACT_acquire.cfWriteAccess | |
| This component can be accessed for writing. | |
| cHDRmFixed0 = lib_mvIMPACT_acquire.cHDRmFixed0 | |
| Fixed HDR parameter set 0. | |
| cHDRmFixed1 = lib_mvIMPACT_acquire.cHDRmFixed1 | |
| Fixed HDR parameter set 1. | |
| cHDRmFixed2 = lib_mvIMPACT_acquire.cHDRmFixed2 | |
| Fixed HDR parameter set 2. | |
| cHDRmFixed3 = lib_mvIMPACT_acquire.cHDRmFixed3 | |
| Fixed HDR parameter set 3. | |
| cHDRmFixed4 = lib_mvIMPACT_acquire.cHDRmFixed4 | |
| Fixed HDR parameter set 4. | |
| cHDRmFixed5 = lib_mvIMPACT_acquire.cHDRmFixed5 | |
| Fixed HDR parameter set 5. | |
| cHDRmFixed6 = lib_mvIMPACT_acquire.cHDRmFixed6 | |
| Fixed HDR parameter set 6. | |
| cHDRmUser = lib_mvIMPACT_acquire.cHDRmUser | |
| User specific HDR mode, controlled by additional parameters. | |
| citInterlaced = lib_mvIMPACT_acquire.citInterlaced | |
| The video signal is transferred interlaced. | |
| citInvertedInterlaced = lib_mvIMPACT_acquire.citInvertedInterlaced | |
| The video signal is transferred interlaced with the two frames in reversed order. | |
| citNone = lib_mvIMPACT_acquire.citNone | |
| The video signal is transmitted non interlaced, meaning that a complete image is transferred without interruption. | |
| cldvmActive = lib_mvIMPACT_acquire.cldvmActive | |
| The camera transmits a data valid (DVAL) signal, that should be evaluated by the frame grabber. | |
| cldvmInactive = lib_mvIMPACT_acquire.cldvmInactive | |
| The camera does not transmit a data valid (DVAL) signal, that should be evaluated by the frame grabber. | |
| cltxg1X = lib_mvIMPACT_acquire.cltxg1X | |
| One tap. | |
| cltxg1X2 = lib_mvIMPACT_acquire.cltxg1X2 | |
| Two taps. | |
| cltxg1X3 = lib_mvIMPACT_acquire.cltxg1X3 | |
| Three taps. | |
| cltxg1X4 = lib_mvIMPACT_acquire.cltxg1X4 | |
| Four taps. | |
| cltxg1X8 = lib_mvIMPACT_acquire.cltxg1X8 | |
| Eight taps. | |
| cltxg2X = lib_mvIMPACT_acquire.cltxg2X | |
| Two taps. | |
| cltxg2X2 = lib_mvIMPACT_acquire.cltxg2X2 | |
| Four taps. | |
| cltxg2X2E = lib_mvIMPACT_acquire.cltxg2X2E | |
| Four taps. | |
| cltxg2X2M = lib_mvIMPACT_acquire.cltxg2X2M | |
| Four taps. | |
| cltxg2XE = lib_mvIMPACT_acquire.cltxg2XE | |
| Two taps. | |
| cltxg2XM = lib_mvIMPACT_acquire.cltxg2XM | |
| Two taps. | |
| cltxg3X = lib_mvIMPACT_acquire.cltxg3X | |
| Three taps. | |
| cltxg4X = lib_mvIMPACT_acquire.cltxg4X | |
| Four taps. | |
| cltxg4X2 = lib_mvIMPACT_acquire.cltxg4X2 | |
| Eight taps. | |
| cltxg4X2E = lib_mvIMPACT_acquire.cltxg4X2E | |
| Eight taps. | |
| cltxg4XE = lib_mvIMPACT_acquire.cltxg4XE | |
| Four taps. | |
| cltxg8X = lib_mvIMPACT_acquire.cltxg8X | |
| Eight taps. | |
| cltyg1Y = lib_mvIMPACT_acquire.cltyg1Y | |
| Lines from top to bottom. | |
| cltyg1Y2 = lib_mvIMPACT_acquire.cltyg1Y2 | |
| Two neighbouring lines are transmitted during one FVAL. | |
| cltyg2YE = lib_mvIMPACT_acquire.cltyg2YE | |
| One line from top and one line from bottom are transmitted during one FVAL. | |
| co2xComposite = lib_mvIMPACT_acquire.co2xComposite | |
| Two cameras will offer two synchronous analogue signals. | |
| co3GSDI = lib_mvIMPACT_acquire.co3GSDI | |
| The camera will offer serial digital interface(SDI) 3G signal. | |
| co3xComposite = lib_mvIMPACT_acquire.co3xComposite | |
| Three cameras will offer three synchronous analogue signals. | |
| co4xComposite = lib_mvIMPACT_acquire.co4xComposite | |
| Four cameras will offer four synchronous analogue signals. | |
| coAuto = lib_mvIMPACT_acquire.coAuto | |
| Auto mode. | |
| coBase = lib_mvIMPACT_acquire.coBase | |
| The camera will offer CameraLink® Base compliant image data. | |
| coComposite = lib_mvIMPACT_acquire.coComposite | |
| The camera will offer an analogue composite video signal. | |
| coDigital = lib_mvIMPACT_acquire.coDigital | |
| The camera will offer digital image data. | |
| coFull = lib_mvIMPACT_acquire.coFull | |
| The camera will offer CameraLink® Full compliant image data. | |
| coHDSDI = lib_mvIMPACT_acquire.coHDSDI | |
| The camera will offer serial digital interface(SDI) HD signal. | |
| coMedium = lib_mvIMPACT_acquire.coMedium | |
| The camera will offer CameraLink® Medium compliant image data. | |
| coRGB = lib_mvIMPACT_acquire.coRGB | |
| The camera will offer an analogue RGB signal. | |
| coSDSDI = lib_mvIMPACT_acquire.coSDSDI | |
| The camera will offer serial digital interface(SDI) SD signal. | |
| coSVideo = lib_mvIMPACT_acquire.coSVideo | |
| The camera will offer an analogue SVideo signal. | |
| coUndefined = lib_mvIMPACT_acquire.coUndefined | |
| Specifies an undefined output. | |
| cpc10000KHz = lib_mvIMPACT_acquire.cpc10000KHz | |
| 10 MHz pixel clock. | |
| cpc12000KHz = lib_mvIMPACT_acquire.cpc12000KHz | |
| 12 MHz pixel clock. | |
| cpc13500KHz = lib_mvIMPACT_acquire.cpc13500KHz | |
| 13.5 MHz pixel clock. | |
| cpc20000KHz = lib_mvIMPACT_acquire.cpc20000KHz | |
| 20 MHz pixel clock. | |
| cpc24000KHz = lib_mvIMPACT_acquire.cpc24000KHz | |
| 24 MHz pixel clock. | |
| cpc24540KHz = lib_mvIMPACT_acquire.cpc24540KHz | |
| 24.54 MHz pixel clock. | |
| cpc27000KHz = lib_mvIMPACT_acquire.cpc27000KHz | |
| 27 MHz pixel clock. | |
| cpc32000KHz = lib_mvIMPACT_acquire.cpc32000KHz | |
| 32 MHz pixel clock. | |
| cpc37600KHz = lib_mvIMPACT_acquire.cpc37600KHz | |
| 37.6 MHz pixel clock. | |
| cpc40000KHz = lib_mvIMPACT_acquire.cpc40000KHz | |
| 40 MHz pixel clock. | |
| cpc50000KHz = lib_mvIMPACT_acquire.cpc50000KHz | |
| 50 MHz pixel clock. | |
| cpc57600KHz = lib_mvIMPACT_acquire.cpc57600KHz | |
| 57.6 MHz pixel clock. | |
| cpc6000KHz = lib_mvIMPACT_acquire.cpc6000KHz | |
| 6 MHz pixel clock. | |
| cpc8000KHz = lib_mvIMPACT_acquire.cpc8000KHz | |
| 8 MHz pixel clock. | |
| cpcHighSpeed = lib_mvIMPACT_acquire.cpcHighSpeed | |
| High speed sensor clocking. | |
| cpcStandard = lib_mvIMPACT_acquire.cpcStandard | |
| Standard sensor clocking. | |
| cpmAuto = lib_mvIMPACT_acquire.cpmAuto | |
| The driver decides (depending on the connected camera) what kind of color processing has to be applied. | |
| cpmBayer = lib_mvIMPACT_acquire.cpmBayer | |
| A Bayer color conversion will be applied before the image is transferred to the user. | |
| cpmBayerToMono = lib_mvIMPACT_acquire.cpmBayerToMono | |
| A Bayer to mono conversion will be applied before the image is transferred to the user. | |
| cpmRaw = lib_mvIMPACT_acquire.cpmRaw | |
| No color processing will be performed. | |
| cpmRawToPlanes = lib_mvIMPACT_acquire.cpmRawToPlanes | |
| No color processing will be performed but the packed raw Bayer data will be re-arranged within the buffer. | |
| crBoolean = lib_mvIMPACT_acquire.crBoolean | |
| Defines a boolean feature. | |
| crDirectoryName = lib_mvIMPACT_acquire.crDirectoryName | |
| Defines a feature representing a directory name. | |
| crFileName = lib_mvIMPACT_acquire.crFileName | |
| Defines a feature representing a file name. | |
| crHexNumber = lib_mvIMPACT_acquire.crHexNumber | |
| Defines a feature representing a hexadecimal number. | |
| crIPv4Address = lib_mvIMPACT_acquire.crIPv4Address | |
| Defines a feature representing an IPv4 address. | |
| crLinear = lib_mvIMPACT_acquire.crLinear | |
| Defines a feature with linear behaviour. | |
| crLogarithmic = lib_mvIMPACT_acquire.crLogarithmic | |
| Defines a feature with logarithmic behaviour. | |
| crMACAddress = lib_mvIMPACT_acquire.crMACAddress | |
| Defines a feature representing a MAC address. | |
| crPureNumber = lib_mvIMPACT_acquire.crPureNumber | |
| Defines a feature representing a pure number. | |
| crUndefined = lib_mvIMPACT_acquire.crUndefined | |
| csmArea = lib_mvIMPACT_acquire.csmArea | |
| The connected camera is an area scan camera. | |
| csmElectronicRollingShutter = lib_mvIMPACT_acquire.csmElectronicRollingShutter | |
| Electronic rolling shutter mode (ERS). | |
| csmExtractSingle = lib_mvIMPACT_acquire.csmExtractSingle | |
| Only one selectable channel will be extracted and forwarded. | |
| csmFrameShutter = lib_mvIMPACT_acquire.csmFrameShutter | |
| Standard Frame-Shutter mode. | |
| csmFrameShutterWithFastCenterReadout = lib_mvIMPACT_acquire.csmFrameShutterWithFastCenterReadout | |
| Start and stop of integration will happen at the same time for all pixels. | |
| csmGlobalResetRelease = lib_mvIMPACT_acquire.csmGlobalResetRelease | |
| Global reset release shutter (GRR). | |
| csmHorizontal = lib_mvIMPACT_acquire.csmHorizontal | |
| The channels will be re-arranged next to each other thus the resulting image will have the same height but 'channel count' times more pixels per line. | |
| csmLine = lib_mvIMPACT_acquire.csmLine | |
| The connected camera is an line scan camera. | |
| csmVertical = lib_mvIMPACT_acquire.csmVertical | |
| The channels will be re-arranged one after the other thus the resulting image will have the same width but 'channel count' times more lines than the input image. | |
| cspbr115200 = lib_mvIMPACT_acquire.cspbr115200 | |
| 115200 baud | |
| cspbr19200 = lib_mvIMPACT_acquire.cspbr19200 | |
| 19200 baud | |
| cspbr230400 = lib_mvIMPACT_acquire.cspbr230400 | |
| 230400 baud | |
| cspbr38400 = lib_mvIMPACT_acquire.cspbr38400 | |
| 38400 baud | |
| cspbr460800 = lib_mvIMPACT_acquire.cspbr460800 | |
| 460800 baud | |
| cspbr57600 = lib_mvIMPACT_acquire.cspbr57600 | |
| 57600 baud | |
| cspbr921600 = lib_mvIMPACT_acquire.cspbr921600 | |
| 921600 baud | |
| cspbr9600 = lib_mvIMPACT_acquire.cspbr9600 | |
| 9600 baud | |
| cticmmDeviceSpecific = lib_mvIMPACT_acquire.cticmmDeviceSpecific | |
| A device specific internally defined correction matrix. | |
| cticmmUser = lib_mvIMPACT_acquire.cticmmUser | |
| A user defined correction matrix. | |
| ctList = lib_mvIMPACT_acquire.ctList | |
| A list object. | |
| ctmContinuous = lib_mvIMPACT_acquire.ctmContinuous | |
| Don't wait for trigger. | |
| ctMeth = lib_mvIMPACT_acquire.ctMeth | |
| A method object. | |
| ctmFramerateControlled = lib_mvIMPACT_acquire.ctmFramerateControlled | |
| Start the exposure of a frame when the trigger input level changes from high to low or from low to high. | |
| ctmGreyRamp = lib_mvIMPACT_acquire.ctmGreyRamp | |
| A grey gradient will be transmitted by the camera. | |
| ctmMovingColor = lib_mvIMPACT_acquire.ctmMovingColor | |
| A color test image with some moving components in it will be displayed. | |
| ctmOff = lib_mvIMPACT_acquire.ctmOff | |
| The 'normal' camera image will be transmitted. | |
| ctmOnAnyEdge = lib_mvIMPACT_acquire.ctmOnAnyEdge | |
| Start the exposure of a frame when the trigger input level changes from high to low or from low to high. | |
| ctmOnDemand = lib_mvIMPACT_acquire.ctmOnDemand | |
| Start frame expose when the software asks for an image. | |
| ctmOnFallingEdge = lib_mvIMPACT_acquire.ctmOnFallingEdge | |
| Start the exposure of a frame when the trigger input level changes from high to low. | |
| ctmOnHighExpose = lib_mvIMPACT_acquire.ctmOnHighExpose | |
| Start frame expose when the trigger input level rises above the trigger threshold and expose while the trigger input level remains above this threshold. | |
| ctmOnHighLevel = lib_mvIMPACT_acquire.ctmOnHighLevel | |
| Start the exposure of a frame when the trigger input is above the trigger threshold. | |
| ctmOnLowExpose = lib_mvIMPACT_acquire.ctmOnLowExpose | |
| Start frame expose when the trigger input level falls below the trigger threshold and expose while the trigger input level remains below this threshold. | |
| ctmOnLowLevel = lib_mvIMPACT_acquire.ctmOnLowLevel | |
| Start the exposure of a frame when the trigger input is below the trigger threshold. | |
| ctmOnRisingEdge = lib_mvIMPACT_acquire.ctmOnRisingEdge | |
| Start the exposure of a frame when the trigger input level changes from low to high. | |
| ctmWBTest = lib_mvIMPACT_acquire.ctmWBTest | |
| A raw white Bayer image will be transmitted. | |
| ctocmmUser = lib_mvIMPACT_acquire.ctocmmUser | |
| A user defined correction matrix. | |
| ctocmmXYZToAdobeRGB_D50 = lib_mvIMPACT_acquire.ctocmmXYZToAdobeRGB_D50 | |
| Will apply the XYZ to Adobe RGB matrix with a D50 white reference. | |
| ctocmmXYZToAdobeRGB_D65 = lib_mvIMPACT_acquire.ctocmmXYZToAdobeRGB_D65 | |
| Will apply the XYZ to Adobe RGB matrix with a D65 white reference. | |
| ctocmmXYZTosRGB_D50 = lib_mvIMPACT_acquire.ctocmmXYZTosRGB_D50 | |
| Will apply the XYZ to sRGB matrix with a D50 white reference. | |
| ctocmmXYZTosRGB_D65 = lib_mvIMPACT_acquire.ctocmmXYZTosRGB_D65 | |
| Will apply the XYZ to sRGB matrix with a D65 white reference. | |
| ctocmmXYZToWideGamutRGB_D50 = lib_mvIMPACT_acquire.ctocmmXYZToWideGamutRGB_D50 | |
| Will apply the XYZ to White Gamut RGB matrix with a D50 white reference. | |
| ctOnChanged = lib_mvIMPACT_acquire.ctOnChanged | |
| Execute callback whenever this component has been modified. | |
| ctOnReadData = lib_mvIMPACT_acquire.ctOnReadData | |
| Executed when a property's value is read. | |
| ctOnRefreshCache = lib_mvIMPACT_acquire.ctOnRefreshCache | |
| Executed when a component is accessed (read or write) and some of the internal data needs to be refreshed from an external source. | |
| ctOnWriteData = lib_mvIMPACT_acquire.ctOnWriteData | |
| Executed when a property's value is written. | |
| ctProp = lib_mvIMPACT_acquire.ctProp | |
| A property type. | |
| ctPropFloat = lib_mvIMPACT_acquire.ctPropFloat | |
| Defines a property for floating point values. | |
| ctPropInt = lib_mvIMPACT_acquire.ctPropInt | |
| Defines a property for 32 bit integer values. | |
| ctPropInt64 = lib_mvIMPACT_acquire.ctPropInt64 | |
| Defines a property for 64 bit integer values. | |
| ctPropPtr = lib_mvIMPACT_acquire.ctPropPtr | |
| Defines a property for pointer values. | |
| ctPropString = lib_mvIMPACT_acquire.ctPropString | |
| Defines a property for string values. | |
| ctsDigIn0 = lib_mvIMPACT_acquire.ctsDigIn0 | |
| Uses digital input 0 as the source for the trigger signal. | |
| ctsDigIn1 = lib_mvIMPACT_acquire.ctsDigIn1 | |
| Use digital input 1 as the source for the trigger signal. | |
| ctsDigOut0 = lib_mvIMPACT_acquire.ctsDigOut0 | |
| Uses digital output 0 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)). | |
| ctsDigOut1 = lib_mvIMPACT_acquire.ctsDigOut1 | |
| Uses digital output 1 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)). | |
| ctsDigOut2 = lib_mvIMPACT_acquire.ctsDigOut2 | |
| Uses digital output 2 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)). | |
| ctsDigOut3 = lib_mvIMPACT_acquire.ctsDigOut3 | |
| Uses digital output 3 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)). | |
| ctsRTCtrl = lib_mvIMPACT_acquire.ctsRTCtrl | |
| Use real time controller (RTCtrl) as the source for the trigger signal. | |
| cvar = lib_mvIMPACT_acquire.cvar | |
| cvBeginner = lib_mvIMPACT_acquire.cvBeginner | |
| Defines a feature that should be visible for all users via the GUI and API. | |
| cvExpert = lib_mvIMPACT_acquire.cvExpert | |
| Defines a feature that requires a more in-depth knowledge of the functionality. | |
| cvGuru = lib_mvIMPACT_acquire.cvGuru | |
| Defines an advanced feature that if not configured correctly might result in unexpected behaviour. | |
| cvInvisible = lib_mvIMPACT_acquire.cvInvisible | |
| Defines a feature that should not be displayed in a GUI but is still accessible via API function calls. | |
| damControl = lib_mvIMPACT_acquire.damControl | |
| Requested or obtained control access to the device. | |
| damExclusive = lib_mvIMPACT_acquire.damExclusive | |
| Requested or obtained exclusive access to the device. | |
| damNone = lib_mvIMPACT_acquire.damNone | |
| No access to the device. | |
| damRead = lib_mvIMPACT_acquire.damRead | |
| Requested or obtained read access to the device. | |
| damUnknown = lib_mvIMPACT_acquire.damUnknown | |
| Unknown device access mode. | |
| danpsmHighToLow = lib_mvIMPACT_acquire.danpsmHighToLow | |
| Start with the maximum possible packet size. | |
| danpsmLowToHigh = lib_mvIMPACT_acquire.danpsmLowToHigh | |
| Start with the minimal possible packet size. | |
| daoEmbeddedImageInfo = lib_mvIMPACT_acquire.daoEmbeddedImageInfo | |
| Embed sensor specific info into the image readout buffer. | |
| daoEnablePerChannelOffsetCorrection = lib_mvIMPACT_acquire.daoEnablePerChannelOffsetCorrection | |
| Enable per channel offset correction. | |
| daoImageAverage = lib_mvIMPACT_acquire.daoImageAverage | |
| Calculate the average intensity value of the image and return as part of the request. | |
| daoLowFrameRateOptimization = lib_mvIMPACT_acquire.daoLowFrameRateOptimization | |
| Enable low frame rate optimization. | |
| daoLowLight = lib_mvIMPACT_acquire.daoLowLight | |
| Put camera in low light mode. | |
| daoOff = lib_mvIMPACT_acquire.daoOff | |
| No advanced option selected. | |
| daoOnDemandTriggerPreShot = lib_mvIMPACT_acquire.daoOnDemandTriggerPreShot | |
| Enable on demand trigger pre-shot option. | |
| daoPipelinedGainExposeControl = lib_mvIMPACT_acquire.daoPipelinedGainExposeControl | |
| Enable pipelined Gain/Exposure control. | |
| daoTriggerSensorColumnCalibration = lib_mvIMPACT_acquire.daoTriggerSensorColumnCalibration | |
| Trigger sensor column correction. | |
| daoUseRawSensorGain = lib_mvIMPACT_acquire.daoUseRawSensorGain | |
| Enable raw sensor gain. | |
| dc3DCamera = lib_mvIMPACT_acquire.dc3DCamera | |
| A 3D camera. | |
| dcCamera = lib_mvIMPACT_acquire.dcCamera | |
| A plain camera device. | |
| dcCameraDescriptionSupport = lib_mvIMPACT_acquire.dcCameraDescriptionSupport | |
| This device supports camera descriptions. | |
| dcEventSupport = lib_mvIMPACT_acquire.dcEventSupport | |
| This device supports events. | |
| dcfmCalibrateDarkCurrent = lib_mvIMPACT_acquire.dcfmCalibrateDarkCurrent | |
| The next selected number of images will be taken for calculating the dark current correction image. | |
| dcfmOff = lib_mvIMPACT_acquire.dcfmOff | |
| The filter is switched off. | |
| dcfmOn = lib_mvIMPACT_acquire.dcfmOn | |
| The filter is switched on. | |
| dcfmTransmitCorrectionImage = lib_mvIMPACT_acquire.dcfmTransmitCorrectionImage | |
| In this mode whenever reaching this filter, the captured image will be replaced by the last correction image, that has been created as a result of the filter being calibrated. | |
| dcFrameGrabber = lib_mvIMPACT_acquire.dcFrameGrabber | |
| A frame grabber device. | |
| dcGeneric = lib_mvIMPACT_acquire.dcGeneric | |
| A generic device. | |
| dcHotplugable = lib_mvIMPACT_acquire.dcHotplugable | |
| This is a device that supports hot plugging. | |
| dcIntelligentCamera = lib_mvIMPACT_acquire.dcIntelligentCamera | |
| An intelligent camera device. | |
| dcNone = lib_mvIMPACT_acquire.dcNone | |
| A dummy constant to indicate, that this device does not have any capabilities defined by other constants belonging to this enumeration. | |
| dcNonVolatileUserMemory = lib_mvIMPACT_acquire.dcNonVolatileUserMemory | |
| This device has non volatile memory, the user can write to and read from. | |
| dcSelectableVideoInputs = lib_mvIMPACT_acquire.dcSelectableVideoInputs | |
| This is a device, that has more than one video input channel. | |
| ddomDigitalSignalPassThrough = lib_mvIMPACT_acquire.ddomDigitalSignalPassThrough | |
| A signal connected to a digital input is passed through to this digital output. | |
| ddomDigitalSignalPassThroughInv = lib_mvIMPACT_acquire.ddomDigitalSignalPassThroughInv | |
| A signal connected to a digital input is inverted and passed to this digital output. | |
| ddomExposureActive = lib_mvIMPACT_acquire.ddomExposureActive | |
| The digital output will change its state during the active exposure period of the image sensor and will switch back to its initial state again once the exposure period is over. | |
| ddomExposureAndAcquisitionActive = lib_mvIMPACT_acquire.ddomExposureAndAcquisitionActive | |
| When there is at least one outstanding request the digital output will change its state during the active exposure period of the image sensor and will switch back to its initial state again once the exposure period is over. | |
| ddomInternalVD = lib_mvIMPACT_acquire.ddomInternalVD | |
| An internal VD sync. | |
| ddomManual = lib_mvIMPACT_acquire.ddomManual | |
| The digital output can be switched manually. | |
| ddomPulse = lib_mvIMPACT_acquire.ddomPulse | |
| A single pulse will be generated on the digital output. | |
| ddomRealTimeController = lib_mvIMPACT_acquire.ddomRealTimeController | |
| The digital output is controlled by a Real Time Controller. | |
| ddomTemperatureOutOfRange = lib_mvIMPACT_acquire.ddomTemperatureOutOfRange | |
| Will change the state whenever the device temperature moves in or out of defined limits(subject to change!). | |
| ddomUser = lib_mvIMPACT_acquire.ddomUser | |
| A user defined signal will be generated on the digital output. | |
| DEV_ACCESS_DENIED = lib_mvIMPACT_acquire.DEV_ACCESS_DENIED | |
| The requested access to a device could not be granted. | |
| DEV_CREATE_SETTING_FAILED = lib_mvIMPACT_acquire.DEV_CREATE_SETTING_FAILED | |
| The creation of a setting failed. | |
| DEV_HANDLE_INVALID = lib_mvIMPACT_acquire.DEV_HANDLE_INVALID | |
| A driver function has been called with an invalid device handle. | |
| DEV_INPUT_PARAM_INVALID = lib_mvIMPACT_acquire.DEV_INPUT_PARAM_INVALID | |
| A driver function has been called but one or more of the input parameters are invalid. | |
| DEV_INTERNAL_ERROR = lib_mvIMPACT_acquire.DEV_INTERNAL_ERROR | |
| Some kind of internal error occurred in the device driver. | |
| DEV_INVALID_REQUEST_NUMBER = lib_mvIMPACT_acquire.DEV_INVALID_REQUEST_NUMBER | |
| The number for the mvIMPACT.acquire.Request object is invalid. | |
| DEV_INVALID_RTC_NUMBER = lib_mvIMPACT_acquire.DEV_INVALID_RTC_NUMBER | |
| The requested real time controller is not available for this device. | |
| DEV_LOCKED_REQUEST_IN_QUEUE = lib_mvIMPACT_acquire.DEV_LOCKED_REQUEST_IN_QUEUE | |
| A Request that hasn't been unlocked has been passed back to the driver. | |
| DEV_NO_FREE_REQUEST_AVAILABLE = lib_mvIMPACT_acquire.DEV_NO_FREE_REQUEST_AVAILABLE | |
| The user requested a new image, but no free mvIMPACT.acquire.Request object is available to process this request. | |
| DEV_REQUEST_ALREADY_IN_USE = lib_mvIMPACT_acquire.DEV_REQUEST_ALREADY_IN_USE | |
| This request is currently used by the driver. | |
| DEV_REQUEST_BUFFER_INVALID = lib_mvIMPACT_acquire.DEV_REQUEST_BUFFER_INVALID | |
| A request has been configured to use a user supplied buffer, but the buffer pointer associated with the request is invalid. | |
| DEV_REQUEST_BUFFER_MISALIGNED = lib_mvIMPACT_acquire.DEV_REQUEST_BUFFER_MISALIGNED | |
| A request has been configured to use a user supplied buffer, but the buffer pointer associated with the request has an incorrect alignment. | |
| DEV_REQUEST_CANT_BE_UNLOCKED = lib_mvIMPACT_acquire.DEV_REQUEST_CANT_BE_UNLOCKED | |
| The unlock for a mvIMPACT.acquire.Request object failed. | |
| DEV_SENSOR_TYPE_ERROR = lib_mvIMPACT_acquire.DEV_SENSOR_TYPE_ERROR | |
| There is no sensor found or the found sensor type is wrong or not supported. | |
| DEV_UNKNOWN_ERROR = lib_mvIMPACT_acquire.DEV_UNKNOWN_ERROR | |
| An unknown error occurred while processing a user called driver function. | |
| DEV_UNSUPPORTED_PARAMETER = lib_mvIMPACT_acquire.DEV_UNSUPPORTED_PARAMETER | |
| The user tried to get/set a parameter, which is not supported by this device. | |
| DEV_WAIT_FOR_REQUEST_FAILED = lib_mvIMPACT_acquire.DEV_WAIT_FOR_REQUEST_FAILED | |
| The wait for a request failed. | |
| DEV_WRONG_INPUT_PARAM_COUNT = lib_mvIMPACT_acquire.DEV_WRONG_INPUT_PARAM_COUNT | |
| A function has been called with an invalid number of input parameters. | |
| digioIgnore = lib_mvIMPACT_acquire.digioIgnore | |
| Digital Input is in 'ignore' state. | |
| digioKeep = lib_mvIMPACT_acquire.digioKeep | |
| Digital Output is kept in unchanged state. | |
| digioOff = lib_mvIMPACT_acquire.digioOff | |
| Digital I/O is in 'logic 0' state. | |
| digioOn = lib_mvIMPACT_acquire.digioOn | |
| Digital I/O is in 'logic 1' state. | |
| dilDeviceSpecific = lib_mvIMPACT_acquire.dilDeviceSpecific | |
| A device specific interface shall be used(deprecated for all GenICam™ compliant devices). | |
| dilGenICam = lib_mvIMPACT_acquire.dilGenICam | |
| A GenICam™ like interface layout shall be used. | |
| diommFrequency_Hz_100ms = lib_mvIMPACT_acquire.diommFrequency_Hz_100ms | |
| Measure frequency with a 100 ms gate time. | |
| diommFrequency_Hz_10ms = lib_mvIMPACT_acquire.diommFrequency_Hz_10ms | |
| Measure frequency with a 10 ms gate time. | |
| diomsInput0 = lib_mvIMPACT_acquire.diomsInput0 | |
| Measurement will be done on digital input 0. | |
| diomsInput1 = lib_mvIMPACT_acquire.diomsInput1 | |
| Measurement will be done on digital input 1. | |
| diomsInput2 = lib_mvIMPACT_acquire.diomsInput2 | |
| Measurement will be done on digital input 2. | |
| diomsInput3 = lib_mvIMPACT_acquire.diomsInput3 | |
| Measurement will be done on digital input 3. | |
| ditAfterDigOutSignals = lib_mvIMPACT_acquire.ditAfterDigOutSignals | |
| Acquisition starts after all defined signals have been generated on the digital outputs. | |
| ditImmediately = lib_mvIMPACT_acquire.ditImmediately | |
| Acquisition starts with trigger event as fast as possible. | |
| dlsAuto = lib_mvIMPACT_acquire.dlsAuto | |
| Tries to load settings automatically following an internal procedure. | |
| dlsNoLoad = lib_mvIMPACT_acquire.dlsNoLoad | |
| No stored settings will be loaded at start-up. | |
| dltCameraDescriptions = lib_mvIMPACT_acquire.dltCameraDescriptions | |
| Specifies the driver interface list providing access to the recognized camera description lists. | |
| dltDeviceSpecificData = lib_mvIMPACT_acquire.dltDeviceSpecificData | |
| Specifies the driver interface list providing access to the device specific settings lists. | |
| dltImageMemoryManager = lib_mvIMPACT_acquire.dltImageMemoryManager | |
| Specifies the driver interface list providing access to the devices memory manager list. | |
| dltInfo = lib_mvIMPACT_acquire.dltInfo | |
| Specifies the driver interfaces list containing general information. | |
| dltIOSubSystem = lib_mvIMPACT_acquire.dltIOSubSystem | |
| Specifies the driver interface list containing properties to work with any kind of I/O pin belonging to that device. | |
| dltLast = lib_mvIMPACT_acquire.dltLast | |
| Defines the last entry in this enumeration. | |
| dltPseudoLast = lib_mvIMPACT_acquire.dltPseudoLast | |
| dltRequest = lib_mvIMPACT_acquire.dltRequest | |
| Specifies the list of driver owned image request objects. | |
| dltRequestCtrl = lib_mvIMPACT_acquire.dltRequestCtrl | |
| Specifies a certain image request control. | |
| dltRTCtr = lib_mvIMPACT_acquire.dltRTCtr | |
| Specifies the driver interface list providing access to the drivers Hardware Real-Time Controller (HRTC). | |
| dltSetting = lib_mvIMPACT_acquire.dltSetting | |
| Specifies a certain setting. | |
| dltStatistics = lib_mvIMPACT_acquire.dltStatistics | |
| Specifies the driver interface list containing statistical information. | |
| dltSystemSettings = lib_mvIMPACT_acquire.dltSystemSettings | |
| Specifies the driver interface list containing properties, which influence the overall operation of the device. | |
| dltUndefined = lib_mvIMPACT_acquire.dltUndefined | |
| A placeholder for an undefined list type. | |
| DM_DDrawOverlay = lib_mvIMPACT_acquire.DM_DDrawOverlay | |
| DirectDraw® mode. | |
| DM_Default = lib_mvIMPACT_acquire.DM_Default | |
| The default display mode. | |
| DM_Fastest = lib_mvIMPACT_acquire.DM_Fastest | |
| The fastest display mode. | |
| DM_FullScreen = lib_mvIMPACT_acquire.DM_FullScreen | |
| Fullscreen (Exclusive) DirectDraw® mode. | |
| DMR_ACQUISITION_ENGINE_BUSY = lib_mvIMPACT_acquire.DMR_ACQUISITION_ENGINE_BUSY | |
| An error returned when the user application attempts to start the acquisition engine at a time, where it is already running. | |
| DMR_BUSY = lib_mvIMPACT_acquire.DMR_BUSY | |
| An error returned when the user application attempts to perform any operation that currently for any reason cannot be started because something else already running. | |
| DMR_CAMERA_DESCRIPTION_INVALID = lib_mvIMPACT_acquire.DMR_CAMERA_DESCRIPTION_INVALID | |
| A function call was associated with a camera description, that is invalid. | |
| DMR_CAMERA_DESCRIPTION_INVALID_PARAMETER = lib_mvIMPACT_acquire.DMR_CAMERA_DESCRIPTION_INVALID_PARAMETER | |
| One or more of the camera descriptions parameters are invalid for the grabber it is used with. | |
| DMR_DEV_CANNOT_OPEN = lib_mvIMPACT_acquire.DMR_DEV_CANNOT_OPEN | |
| The specified device couldn't be initialized. | |
| DMR_DEV_NOT_FOUND = lib_mvIMPACT_acquire.DMR_DEV_NOT_FOUND | |
| The specified device can't be found. | |
| DMR_DEV_REQUEST_CREATION_FAILED = lib_mvIMPACT_acquire.DMR_DEV_REQUEST_CREATION_FAILED | |
| A request object couldn't be created. | |
| DMR_DEV_REQUEST_QUEUE_EMPTY = lib_mvIMPACT_acquire.DMR_DEV_REQUEST_QUEUE_EMPTY | |
| The devices request queue is empty. | |
| DMR_DRV_ALREADY_IN_USE = lib_mvIMPACT_acquire.DMR_DRV_ALREADY_IN_USE | |
| The device is already in use. | |
| DMR_DRV_CANNOT_OPEN = lib_mvIMPACT_acquire.DMR_DRV_CANNOT_OPEN | |
| A device could not be initialized. | |
| DMR_EXECUTION_FAILED = lib_mvIMPACT_acquire.DMR_EXECUTION_FAILED | |
| The execution of a method object or reading/writing to a feature failed. | |
| DMR_EXECUTION_PROHIBITED = lib_mvIMPACT_acquire.DMR_EXECUTION_PROHIBITED | |
| The user is not permitted to perform the requested operation. | |
| DMR_EXPORTED_SYMBOL_NOT_FOUND = lib_mvIMPACT_acquire.DMR_EXPORTED_SYMBOL_NOT_FOUND | |
| One or more symbols needed in a detected driver library couldn't be resolved. | |
| DMR_FEATURE_NOT_AVAILABLE = lib_mvIMPACT_acquire.DMR_FEATURE_NOT_AVAILABLE | |
| The feature in question is (currently) not available for this device or driver. | |
| DMR_FILE_ACCESS_ERROR = lib_mvIMPACT_acquire.DMR_FILE_ACCESS_ERROR | |
| A general error returned whenever there has been a problem with accessing a file. | |
| DMR_FILE_NOT_FOUND = lib_mvIMPACT_acquire.DMR_FILE_NOT_FOUND | |
| The specified file can't be found. | |
| DMR_FUNCTION_NOT_IMPLEMENTED = lib_mvIMPACT_acquire.DMR_FUNCTION_NOT_IMPLEMENTED | |
| A called function or accessed feature is not available for this device. | |
| DMR_INIT_FAILED = lib_mvIMPACT_acquire.DMR_INIT_FAILED | |
| The device manager couldn't be initialized. | |
| DMR_INPUT_BUFFER_TOO_SMALL = lib_mvIMPACT_acquire.DMR_INPUT_BUFFER_TOO_SMALL | |
| The user allocated input buffer is too small to accommodate the result. | |
| DMR_INTERNAL_ERROR = lib_mvIMPACT_acquire.DMR_INTERNAL_ERROR | |
| Some kind of internal error occurred. | |
| DMR_INVALID_LICENCE = lib_mvIMPACT_acquire.DMR_INVALID_LICENCE | |
| The licence doesn't match the device it has been assigned to. | |
| DMR_INVALID_PARAMETER = lib_mvIMPACT_acquire.DMR_INVALID_PARAMETER | |
| An invalid parameter has been passed to a function. | |
| DMR_INVALID_QUEUE_SELECTION = lib_mvIMPACT_acquire.DMR_INVALID_QUEUE_SELECTION | |
| An error returned when the user application attempts to operate on an invalid queue. | |
| DMR_LAST_VALID_ERROR_CODE = lib_mvIMPACT_acquire.DMR_LAST_VALID_ERROR_CODE | |
| Defines the last valid error code value for device and device manager related errors. | |
| DMR_LIBRARY_NOT_FOUND = lib_mvIMPACT_acquire.DMR_LIBRARY_NOT_FOUND | |
| One or more needed libraries are not installed on the system. | |
| DMR_NEWER_LIBRARY_REQUIRED = lib_mvIMPACT_acquire.DMR_NEWER_LIBRARY_REQUIRED | |
| A suitable driver library to work with the device manager has been detected, but it is too old to work with this version of the mvDeviceManager library. | |
| DMR_NO_ERROR = lib_mvIMPACT_acquire.DMR_NO_ERROR | |
| The function call was executed successfully. | |
| DMR_NOT_INITIALIZED = lib_mvIMPACT_acquire.DMR_NOT_INITIALIZED | |
| The device manager or another module hasn't been initialized properly. | |
| DMR_OUT_OF_MEMORY = lib_mvIMPACT_acquire.DMR_OUT_OF_MEMORY | |
| An error returned when for any reason internal resources (memory, handles, ...) cannot be allocated. | |
| DMR_PRELOAD_CHECK_FAILED = lib_mvIMPACT_acquire.DMR_PRELOAD_CHECK_FAILED | |
| A pre-load condition for loading a device driver failed. | |
| DMR_TIMEOUT = lib_mvIMPACT_acquire.DMR_TIMEOUT | |
| A general timeout occurred. | |
| DMR_WAIT_ABANDONED = lib_mvIMPACT_acquire.DMR_WAIT_ABANDONED | |
| A wait operation has been aborted. | |
| docmRTC = lib_mvIMPACT_acquire.docmRTC | |
| The digital output signal is generated by a Real Time Controller that is part of the used hardware device. | |
| docmSoftware = lib_mvIMPACT_acquire.docmSoftware | |
| The digital output signal is generated by the on-board processor. | |
| dpfm3x1Average = lib_mvIMPACT_acquire.dpfm3x1Average | |
| The filter is active, detected defective pixels will be replaced with the average value from the left and right neighbor pixel. | |
| dpfm3x3Median = lib_mvIMPACT_acquire.dpfm3x3Median | |
| The filter is active, detected defective pixels will be replaced with the median value calculated from the nearest neighbors (3x3). | |
| dpfmCalibrateColdPixel = lib_mvIMPACT_acquire.dpfmCalibrateColdPixel | |
| Detect defective cold pixels within the next frame captured. | |
| dpfmCalibrateHotAndColdPixel = lib_mvIMPACT_acquire.dpfmCalibrateHotAndColdPixel | |
| Detect defective hot and cold pixels within the next frame captured. | |
| dpfmCalibrateHotPixel = lib_mvIMPACT_acquire.dpfmCalibrateHotPixel | |
| Detect defective hot pixels within the next frame captured. | |
| dpfmCalibrateLeakyPixel = lib_mvIMPACT_acquire.dpfmCalibrateLeakyPixel | |
| Detect defective leaky pixels within the next frame captured. | |
| dpfmOff = lib_mvIMPACT_acquire.dpfmOff | |
| This filter is switched off. | |
| dpfmReplaceDefectivePixelAfter3x3Filter = lib_mvIMPACT_acquire.dpfmReplaceDefectivePixelAfter3x3Filter | |
| The filter is active, detected defective pixel will be replaced and treated as being fed into a 3x3 de-Bayer algorithm before reaching the filter. | |
| dpfmResetCalibration = lib_mvIMPACT_acquire.dpfmResetCalibration | |
| reset the calibration, delete all internal lists. | |
| dpmOff = lib_mvIMPACT_acquire.dpmOff | |
| This device is switched off. | |
| dpmOn = lib_mvIMPACT_acquire.dpmOn | |
| This device is switched on. | |
| dsAbsent = lib_mvIMPACT_acquire.dsAbsent | |
| The mvIMPACT.acquire.Device has been unplugged. | |
| dsInitializing = lib_mvIMPACT_acquire.dsInitializing | |
| The mvIMPACT.acquire.Device is connected and is currently initializing. | |
| dsNone = lib_mvIMPACT_acquire.dsNone | |
| A dummy value to delete a mask or signal configuration. | |
| dsomInterlaced = lib_mvIMPACT_acquire.dsomInterlaced | |
| A interlaced HD-out/VD-out signal is generated. | |
| dsomNonInterlaced = lib_mvIMPACT_acquire.dsomNonInterlaced | |
| A non interlaced HD-out/VD-out signal is generated. | |
| dsomOff = lib_mvIMPACT_acquire.dsomOff | |
| Sync. | |
| dsoseFrame = lib_mvIMPACT_acquire.dsoseFrame | |
| The signal generation on the digital outputs starts with the next frame start signal ( e.g.: VSync ). | |
| dsoseFrameAfterTrigger = lib_mvIMPACT_acquire.dsoseFrameAfterTrigger | |
| The signal generation on the digital outputs starts with next frame signal after the event defined in setting->camera->trigger. | |
| dsoseFVALPassThrough = lib_mvIMPACT_acquire.dsoseFVALPassThrough | |
| The FVAL - signal is passed to the selected digital output. | |
| dsoseFVALPassThroughInv = lib_mvIMPACT_acquire.dsoseFVALPassThroughInv | |
| The FVAL - signal is inverted and passed to the selected digital output. | |
| dsoseFVALRisingEdge = lib_mvIMPACT_acquire.dsoseFVALRisingEdge | |
| The signal generation on the digital outputs starts with the rising edge of FVAL - signal. | |
| dsosePeriodically = lib_mvIMPACT_acquire.dsosePeriodically | |
| The signal generation on the digital outputs starts periodically. | |
| dsoseSyncInFallingEdge = lib_mvIMPACT_acquire.dsoseSyncInFallingEdge | |
| The signal generation on the digital outputs starts with the falling edge of SyncIn - signal. | |
| dsoseSyncInPassThrough = lib_mvIMPACT_acquire.dsoseSyncInPassThrough | |
| The SyncIn - signal is passed to the selected digital output. | |
| dsoseSyncInPassThroughInv = lib_mvIMPACT_acquire.dsoseSyncInPassThroughInv | |
| The SyncIn - signal is inverted and passed to the selected digital output. | |
| dsoseSyncInRisingEdge = lib_mvIMPACT_acquire.dsoseSyncInRisingEdge | |
| The signal generation on the digital outputs starts with the rising edge of SyncIn - signal. | |
| dsoseTrigger = lib_mvIMPACT_acquire.dsoseTrigger | |
| The signal generation on the digital outputs starts with the event defined in setting->camera->trigger. | |
| dsoseTriggerInPassThrough = lib_mvIMPACT_acquire.dsoseTriggerInPassThrough | |
| The TriggerIn - signal is passed to the selected digital output. | |
| dsoseTriggerInPassThroughInv = lib_mvIMPACT_acquire.dsoseTriggerInPassThroughInv | |
| The TriggerIn - signal is inverted and passed to the selected digital output. | |
| dsPowerDown = lib_mvIMPACT_acquire.dsPowerDown | |
| This device is present, but currently switched into a low power consumption mode. | |
| dsPresent = lib_mvIMPACT_acquire.dsPresent | |
| The mvIMPACT.acquire.Device is currently connected and initialized. | |
| dsrmAuto = lib_mvIMPACT_acquire.dsrmAuto | |
| Auto, scan rate of camera used. | |
| dsrmUser = lib_mvIMPACT_acquire.dsrmUser | |
| User, scan rate must be set manually. | |
| dsSignal1 = lib_mvIMPACT_acquire.dsSignal1 | |
| A constant for digital signal 1. | |
| dsSignal10 = lib_mvIMPACT_acquire.dsSignal10 | |
| A constant for digital signal 10. | |
| dsSignal11 = lib_mvIMPACT_acquire.dsSignal11 | |
| A constant for digital signal 11. | |
| dsSignal12 = lib_mvIMPACT_acquire.dsSignal12 | |
| A constant for digital signal 12. | |
| dsSignal13 = lib_mvIMPACT_acquire.dsSignal13 | |
| A constant for digital signal 13. | |
| dsSignal14 = lib_mvIMPACT_acquire.dsSignal14 | |
| A constant for digital signal 14. | |
| dsSignal15 = lib_mvIMPACT_acquire.dsSignal15 | |
| A constant for digital signal 15. | |
| dsSignal16 = lib_mvIMPACT_acquire.dsSignal16 | |
| A constant for digital signal 16. | |
| dsSignal2 = lib_mvIMPACT_acquire.dsSignal2 | |
| A constant for digital signal 2. | |
| dsSignal3 = lib_mvIMPACT_acquire.dsSignal3 | |
| A constant for digital signal 3. | |
| dsSignal4 = lib_mvIMPACT_acquire.dsSignal4 | |
| A constant for digital signal 4. | |
| dsSignal5 = lib_mvIMPACT_acquire.dsSignal5 | |
| A constant for digital signal 5. | |
| dsSignal6 = lib_mvIMPACT_acquire.dsSignal6 | |
| A constant for digital signal 6. | |
| dsSignal7 = lib_mvIMPACT_acquire.dsSignal7 | |
| A constant for digital signal 7. | |
| dsSignal8 = lib_mvIMPACT_acquire.dsSignal8 | |
| A constant for digital signal 8. | |
| dsSignal9 = lib_mvIMPACT_acquire.dsSignal9 | |
| A constant for digital signal 9. | |
| dsUnreachable = lib_mvIMPACT_acquire.dsUnreachable | |
| This device is recognized, but can't be accessed currently. | |
| dtiAdvanced = lib_mvIMPACT_acquire.dtiAdvanced | |
| The advanced view on the trigger interface. | |
| dtiStandard = lib_mvIMPACT_acquire.dtiStandard | |
| The standard trigger interface. | |
| dtmFallingEdge = lib_mvIMPACT_acquire.dtmFallingEdge | |
| Trigger on falling edge of an external signal. | |
| dtmLevelHigh = lib_mvIMPACT_acquire.dtmLevelHigh | |
| Trigger valid as long as the level of the source signal is high. | |
| dtmLevelLow = lib_mvIMPACT_acquire.dtmLevelLow | |
| Trigger valid as long as the level of the source signal is low. | |
| dtmOff = lib_mvIMPACT_acquire.dtmOff | |
| Trigger off. | |
| dtmOn = lib_mvIMPACT_acquire.dtmOn | |
| Trigger on. | |
| dtmOnDemand = lib_mvIMPACT_acquire.dtmOnDemand | |
| Request simulates trigger. | |
| dtmPeriodically = lib_mvIMPACT_acquire.dtmPeriodically | |
| Timer is used to simulate trigger. | |
| dtmRisingEdge = lib_mvIMPACT_acquire.dtmRisingEdge | |
| Trigger on rising edge of an external signal. | |
| dtmStartFallingStopRising = lib_mvIMPACT_acquire.dtmStartFallingStopRising | |
| Line scan mode: Acquisition starts with falling edge and stops with rising edge of trigger ( mvTITAN/mvGAMMA-CL only ). | |
| dtmStartRisingStopFalling = lib_mvIMPACT_acquire.dtmStartRisingStopFalling | |
| Line scan mode: Acquisition starts with rising edge and stops with falling edge of trigger ( mvTITAN/mvGAMMA-CL only ). | |
| dtoOff = lib_mvIMPACT_acquire.dtoOff | |
| No trigger overlap is permitted. | |
| dtoPreviousFrame = lib_mvIMPACT_acquire.dtoPreviousFrame | |
| Trigger is accepted at any time during the capture of the previous frame. | |
| dtoReadOut = lib_mvIMPACT_acquire.dtoReadOut | |
| Trigger is accepted immediately after the exposure period. | |
| ecmAuto = lib_mvIMPACT_acquire.ecmAuto | |
| Clamp pulse starts at 80 % of ActiveVideoAoi/X. | |
| ecmUser = lib_mvIMPACT_acquire.ecmUser | |
| The user can set the clamp start time in micro sec. | |
| efmAuto = lib_mvIMPACT_acquire.efmAuto | |
| Field gate starts at 1/3 of a line and ends at 2/3 of a line. | |
| efmUser = lib_mvIMPACT_acquire.efmUser | |
| FieldGateStart and FieldGateWidth can be set in pixels. | |
| END_OF_LIST = cvar.END_OF_LIST | |
| ffBGR2BytePacked_V2 = lib_mvIMPACT_acquire.ffBGR2BytePacked_V2 | |
| Valid values for bits per pixel in this format: 30 (R=pix&0x3FF, G=(pix>>10)&0x3FF, B=(pix>>20)&3FF). | |
| ffBGR888xPacked = lib_mvIMPACT_acquire.ffBGR888xPacked | |
| Valid values for bits per pixel in this format: 15, 16, 24, 32; pData[0] points to the packed image data. | |
| ffcmBrightPreserving = lib_mvIMPACT_acquire.ffcmBrightPreserving | |
| The flat field correction with clipping compensation is used. | |
| ffcmDefault = lib_mvIMPACT_acquire.ffcmDefault | |
| The default flat field correction is used. | |
| fffmCalibrateFlatField = lib_mvIMPACT_acquire.fffmCalibrateFlatField | |
| The next selected number of images will be taken for calculating the flat field correction image. | |
| fffmOff = lib_mvIMPACT_acquire.fffmOff | |
| The filter is switched off. | |
| fffmOn = lib_mvIMPACT_acquire.fffmOn | |
| The filter is switched on. | |
| fffmTransmitCorrectionImage = lib_mvIMPACT_acquire.fffmTransmitCorrectionImage | |
| In this mode whenever reaching this filter, the captured image will be replaced by the last correction image, that has been created as a result of the filter being calibrated. | |
| ffMono = lib_mvIMPACT_acquire.ffMono | |
| Valid values for bits per pixel in this format: 8, 10, 12, 14, 16, LSB aligned. | |
| ffMonoPacked_V1 = lib_mvIMPACT_acquire.ffMonoPacked_V1 | |
| Valid values for bits per pixel in this format: 12, 8 MSB(1), 4 LSB(1) + 4 MSB(2), 8LSB(2). | |
| ffMonoPacked_V2 = lib_mvIMPACT_acquire.ffMonoPacked_V2 | |
| Valid values for bits per pixel in this format: 12, 8 MSB(1), 4 LSBs(1+2), 8MSB(2). | |
| ffRaw = lib_mvIMPACT_acquire.ffRaw | |
| Valid values for bits per pixel in this format: not used. | |
| ffRGB2BytePacked = lib_mvIMPACT_acquire.ffRGB2BytePacked | |
| Valid values for bits per pixel in this format: 30, 36, 42 or 48 10-16 bits per color component RGB packed data. | |
| ffRGB888xPacked = lib_mvIMPACT_acquire.ffRGB888xPacked | |
| Valid values for bits per pixel in this format: 15, 16, 24, 32; pData[0] points to the packed image data. | |
| ffRGB888xPlanar = lib_mvIMPACT_acquire.ffRGB888xPlanar | |
| Valid values for bits per pixel in this format: not used, 8 bit per plane, pData[0] points to the Blue, pData[1] points to the Green, pData[2] points to the Red plane. | |
| ffUYV444 = lib_mvIMPACT_acquire.ffUYV444 | |
| Valid values for bits per pixel in this format: 24 or 48. | |
| ffUYVY = lib_mvIMPACT_acquire.ffUYVY | |
| Valid values for bits per pixel in this format: 16, 20, YUV422: 8-10 bit U | 8-10 bit Y | 8-10 bit V | 8-10 bit Y. | |
| ffYUV411_UYYVYY_Packed = lib_mvIMPACT_acquire.ffYUV411_UYYVYY_Packed | |
| Valid values for bits per pixel in this format: not used, YUV411: 8 bit U | 8 bit Y1 | 8 bit Y2 | 8 bit V | 8 bit Y3 | 8 bit Y4. | |
| ffYUV422Planar = lib_mvIMPACT_acquire.ffYUV422Planar | |
| Valid values for bits per pixel in this format: not used, YUV422 planar. | |
| ffYUV444 = lib_mvIMPACT_acquire.ffYUV444 | |
| Valid values for bits per pixel in this format: 48. | |
| ffYUY2 = lib_mvIMPACT_acquire.ffYUY2 | |
| Valid values for bits per pixel in this format: 16, 20, YUV422: 8-10 bit Y | 8-10 bit U | 8-10 bit Y | 8-10 bit V. | |
| fuaCancel = lib_mvIMPACT_acquire.fuaCancel | |
| Return this value to request the driver to terminate an ongoing firmware update as soon as possible. | |
| fuaContinue = lib_mvIMPACT_acquire.fuaContinue | |
| The default return value to tell the driver to continue processing the firmware update. | |
| fusErasingFlash = lib_mvIMPACT_acquire.fusErasingFlash | |
| Erasing the device's flash memory. | |
| fusErrorMessage = lib_mvIMPACT_acquire.fusErrorMessage | |
| A message wants to be sent. | |
| fusHardResetRequired = lib_mvIMPACT_acquire.fusHardResetRequired | |
| An external hard reset is required. | |
| fusLoadingUserSets = lib_mvIMPACT_acquire.fusLoadingUserSets | |
| Loading user sets of the device. | |
| fusRebootingDevice = lib_mvIMPACT_acquire.fusRebootingDevice | |
| Rebooting the device. | |
| fusSavingUserSets = lib_mvIMPACT_acquire.fusSavingUserSets | |
| Saving user sets of the device. | |
| fusUnzippingFirmwareArchive = lib_mvIMPACT_acquire.fusUnzippingFirmwareArchive | |
| Unzipping the .mvu file. | |
| fusUpdatingBootProgrammer = lib_mvIMPACT_acquire.fusUpdatingBootProgrammer | |
| Updating the boot programmer of the device. | |
| fusUploadingFirmware = lib_mvIMPACT_acquire.fusUploadingFirmware | |
| Uploading firmware into device memory. | |
| I2ComRead = lib_mvIMPACT_acquire.I2ComRead | |
| Selects I2C read access. | |
| I2ComWrite = lib_mvIMPACT_acquire.I2ComWrite | |
| Selects I2C write access. | |
| I2CosFailure = lib_mvIMPACT_acquire.I2CosFailure | |
| The last I2C operation did fail. | |
| I2CosInvalidDeviceAddress = lib_mvIMPACT_acquire.I2CosInvalidDeviceAddress | |
| During the execution of the last I2C operation an invalid device address was specified. | |
| I2CosInvalidDeviceSubAddress = lib_mvIMPACT_acquire.I2CosInvalidDeviceSubAddress | |
| During the execution of the last I2C operation an invalid device sub-address was specified. | |
| I2CosNotEnoughData = lib_mvIMPACT_acquire.I2CosNotEnoughData | |
| During the execution of the last I2C operation the amount of data requested or sent was too small. | |
| I2CosSuccess = lib_mvIMPACT_acquire.I2CosSuccess | |
| The last I2C operation was successful. | |
| I2CosTooMuchData = lib_mvIMPACT_acquire.I2CosTooMuchData | |
| During the execution of the last I2C operation too much data was either requested or sent. | |
| ibfNone = lib_mvIMPACT_acquire.ibfNone | |
| A dummy constant to state that none of the flags shall be specified. | |
| ibfRecycleBufHandle = lib_mvIMPACT_acquire.ibfRecycleBufHandle | |
| If an existing IPL_BUFHANDLE is passed to a function it will try to copy data in this buffer instead of freeing it. | |
| ibfrmMono10_To_Mono10 = lib_mvIMPACT_acquire.ibfrmMono10_To_Mono10 | |
| Attach or remove a mvIMPACT.acquire.TBayerMosaicParity attribute to a mvIMPACT.acquire.ibpfMono8 buffer OR change the existing Bayer attribute to a different value. | |
| ibfrmMono10_To_RGB101010Packed = lib_mvIMPACT_acquire.ibfrmMono10_To_RGB101010Packed | |
| Reinterpret mvIMPACT.acquire.ibpfMono10 as mvIMPACT.acquire.ibpfRGB101010Packed. | |
| ibfrmMono12_To_Mono12 = lib_mvIMPACT_acquire.ibfrmMono12_To_Mono12 | |
| Attach or remove a mvIMPACT.acquire.TBayerMosaicParity attribute to a mvIMPACT.acquire.ibpfMono8 buffer OR change the existing Bayer attribute to a different value. | |
| ibfrmMono12_To_RGB121212Packed = lib_mvIMPACT_acquire.ibfrmMono12_To_RGB121212Packed | |
| Reinterpret mvIMPACT.acquire.ibpfMono12 as mvIMPACT.acquire.ibpfRGB121212Packed. | |
| ibfrmMono14_To_Mono14 = lib_mvIMPACT_acquire.ibfrmMono14_To_Mono14 | |
| Attach or remove a mvIMPACT.acquire.TBayerMosaicParity attribute to a mvIMPACT.acquire.ibpfMono8 buffer OR change the existing Bayer attribute to a different value. | |
| ibfrmMono14_To_RGB141414Packed = lib_mvIMPACT_acquire.ibfrmMono14_To_RGB141414Packed | |
| Reinterpret mvIMPACT.acquire.ibpfMono14 as mvIMPACT.acquire.ibpfRGB141414Packed. | |
| ibfrmMono16_To_Mono16 = lib_mvIMPACT_acquire.ibfrmMono16_To_Mono16 | |
| Attach or remove a mvIMPACT.acquire.TBayerMosaicParity attribute to a mvIMPACT.acquire.ibpfMono8 buffer OR change the existing Bayer attribute to a different value. | |
| ibfrmMono16_To_RGB161616Packed = lib_mvIMPACT_acquire.ibfrmMono16_To_RGB161616Packed | |
| Reinterpret mvIMPACT.acquire.ibpfMono16 as mvIMPACT.acquire.ibpfRGB161616Packed. | |
| ibfrmMono8_To_BGR888Packed = lib_mvIMPACT_acquire.ibfrmMono8_To_BGR888Packed | |
| Reinterpret mvIMPACT.acquire.ibpfMono8 as mvIMPACT.acquire.ibpfBGR888Packed. | |
| ibfrmMono8_To_Mono8 = lib_mvIMPACT_acquire.ibfrmMono8_To_Mono8 | |
| Attach or remove a mvIMPACT.acquire.TBayerMosaicParity attribute to a mvIMPACT.acquire.ibpfMono8 buffer OR change the existing Bayer attribute to a different value. | |
| ibfrmMono8_To_RGB888Packed = lib_mvIMPACT_acquire.ibfrmMono8_To_RGB888Packed | |
| Reinterpret mvIMPACT.acquire.ibpfMono8 as mvIMPACT.acquire.ibpfRGB888Packed. | |
| ibfUseRequestMemory = lib_mvIMPACT_acquire.ibfUseRequestMemory | |
| If set no new memory will be allocated for the creation of the mvIMPACT buffer. | |
| ibpfAuto = lib_mvIMPACT_acquire.ibpfAuto | |
| The framework will decide which format will be used. | |
| ibpfBGR101010Packed_V2 = lib_mvIMPACT_acquire.ibpfBGR101010Packed_V2 | |
| A three channel 10 bit per color component RGB packed format occupying 32 bit per pixel. | |
| ibpfBGR888Packed = lib_mvIMPACT_acquire.ibpfBGR888Packed | |
| A three channel interleaved RGB format with 24 bit per pixel. | |
| ibpfMono10 = lib_mvIMPACT_acquire.ibpfMono10 | |
| A single channel 10 bit per pixel format. | |
| ibpfMono12 = lib_mvIMPACT_acquire.ibpfMono12 | |
| A single channel 12 bit per pixel format. | |
| ibpfMono12Packed_V1 = lib_mvIMPACT_acquire.ibpfMono12Packed_V1 | |
| A single channel 12 bit per pixel packed format occupying 12 bit per pixel. | |
| ibpfMono12Packed_V2 = lib_mvIMPACT_acquire.ibpfMono12Packed_V2 | |
| A single channel 12 bit per pixel packed format occupying 12 bit per pixel. | |
| ibpfMono14 = lib_mvIMPACT_acquire.ibpfMono14 | |
| A single channel 14 bit per pixel format. | |
| ibpfMono16 = lib_mvIMPACT_acquire.ibpfMono16 | |
| A single channel 16 bit per pixel format. | |
| ibpfMono32 = lib_mvIMPACT_acquire.ibpfMono32 | |
| A single channel 32 bit per pixel format. | |
| ibpfMono8 = lib_mvIMPACT_acquire.ibpfMono8 | |
| A single channel 8 bit per pixel format. | |
| ibpfRaw = lib_mvIMPACT_acquire.ibpfRaw | |
| An unprocessed block of data. | |
| ibpfRGB101010Packed = lib_mvIMPACT_acquire.ibpfRGB101010Packed | |
| A three channel interleaved RGB image occupying 48 bit with 30 bit of usable data per pixel. | |
| ibpfRGB121212Packed = lib_mvIMPACT_acquire.ibpfRGB121212Packed | |
| A three channel interleaved RGB image occupying 48 bit with 36 bit of usable data per pixel. | |
| ibpfRGB141414Packed = lib_mvIMPACT_acquire.ibpfRGB141414Packed | |
| A three channel interleaved RGB image occupying 48 bit with 42 bit of usable data per pixel. | |
| ibpfRGB161616Packed = lib_mvIMPACT_acquire.ibpfRGB161616Packed | |
| A three channel interleaved RGB image occupying 48 bit per pixel. | |
| ibpfRGB888Packed = lib_mvIMPACT_acquire.ibpfRGB888Packed | |
| A three channel interleaved RGB format containing 24 bit per pixel. | |
| ibpfRGB888Planar = lib_mvIMPACT_acquire.ibpfRGB888Planar | |
| A three channel planar RGB format. | |
| ibpfRGBx888Packed = lib_mvIMPACT_acquire.ibpfRGBx888Packed | |
| A four channel interleaved RGB format with 32 bit per pixel containing one alpha byte per pixel. | |
| ibpfRGBx888Planar = lib_mvIMPACT_acquire.ibpfRGBx888Planar | |
| A four channel planar RGB format. | |
| ibpfYUV411_UYYVYY_Packed = lib_mvIMPACT_acquire.ibpfYUV411_UYYVYY_Packed | |
| A three channel interleaved YUV format occupying 48 bit for four pixels. | |
| ibpfYUV422_10Packed = lib_mvIMPACT_acquire.ibpfYUV422_10Packed | |
| A three channel interleaved YUV422 format occupying 64 bit for a pair of pixels. | |
| ibpfYUV422_UYVY_10Packed = lib_mvIMPACT_acquire.ibpfYUV422_UYVY_10Packed | |
| A three channel interleaved YUV422 format occupying 64 bit for a pair of pixels. | |
| ibpfYUV422_UYVYPacked = lib_mvIMPACT_acquire.ibpfYUV422_UYVYPacked | |
| A three channel interleaved YUV422 format occupying 32 bit for a pair of pixels. | |
| ibpfYUV422Packed = lib_mvIMPACT_acquire.ibpfYUV422Packed | |
| A three channel interleaved YUV422 format using 32 bit for a pair of pixels. | |
| ibpfYUV422Planar = lib_mvIMPACT_acquire.ibpfYUV422Planar | |
| A three channel YUV422 planar format occupying 32 bit for a pair of pixels. | |
| ibpfYUV444_10Packed = lib_mvIMPACT_acquire.ibpfYUV444_10Packed | |
| A three channel interleaved YUV format occupying 48 bit per pixel with 30 bit of usable data per pixel. | |
| ibpfYUV444_UYV_10Packed = lib_mvIMPACT_acquire.ibpfYUV444_UYV_10Packed | |
| A three channel interleaved YUV format occupying 48 bit per pixel with 30 bit of usable data per pixel. | |
| ibpfYUV444_UYVPacked = lib_mvIMPACT_acquire.ibpfYUV444_UYVPacked | |
| A three channel interleaved YUV format occupying 24 bit per pixel. | |
| ibpfYUV444Packed = lib_mvIMPACT_acquire.ibpfYUV444Packed | |
| A three channel interleaved YUV format occupying 24 bit per pixel. | |
| ibpfYUV444Planar = lib_mvIMPACT_acquire.ibpfYUV444Planar | |
| A three channel YUV444 planar format occupying 24 bit per pixels. | |
| IDE_DirectDrawAccessFailed = lib_mvIMPACT_acquire.IDE_DirectDrawAccessFailed | |
| Calling a DirectDraw® function did fail. | |
| IDE_InternalError = lib_mvIMPACT_acquire.IDE_InternalError | |
| Unspecified internal error. | |
| IDE_InvalidHandle = lib_mvIMPACT_acquire.IDE_InvalidHandle | |
| One or more of the handles passed to a function where invalid. | |
| IDE_NoError = lib_mvIMPACT_acquire.IDE_NoError | |
| No error occurred since the last time the error code was queried. | |
| IDE_OutOfMemory = lib_mvIMPACT_acquire.IDE_OutOfMemory | |
| There is not enough memory available to perform the requested operation. | |
| IDE_UpdateFailed = lib_mvIMPACT_acquire.IDE_UpdateFailed | |
| The update failed. | |
| idpfAuto = lib_mvIMPACT_acquire.idpfAuto | |
| The driver will decide which destination format will be used. | |
| idpfBGR101010Packed_V2 = lib_mvIMPACT_acquire.idpfBGR101010Packed_V2 | |
| A three channel 10 bit per color component RGB packed format occupying 32 bit per pixel. | |
| idpfBGR888Packed = lib_mvIMPACT_acquire.idpfBGR888Packed | |
| A three channel interleaved RGB format with 24 bit per pixel. | |
| idpfMono10 = lib_mvIMPACT_acquire.idpfMono10 | |
| A single channel 10 bit per pixel format. | |
| idpfMono12 = lib_mvIMPACT_acquire.idpfMono12 | |
| A single channel 12 bit per pixel format. | |
| idpfMono12Packed_V1 = lib_mvIMPACT_acquire.idpfMono12Packed_V1 | |
| A single channel 12 bit per pixel packed format occupying 12 bit per pixel. | |
| idpfMono12Packed_V2 = lib_mvIMPACT_acquire.idpfMono12Packed_V2 | |
| A single channel 12 bit per pixel packed format occupying 12 bit per pixel. | |
| idpfMono14 = lib_mvIMPACT_acquire.idpfMono14 | |
| A single channel 14 bit per pixel format. | |
| idpfMono16 = lib_mvIMPACT_acquire.idpfMono16 | |
| A single channel 16 bit per pixel format. | |
| idpfMono8 = lib_mvIMPACT_acquire.idpfMono8 | |
| A single channel 8 bit per pixel format. | |
| idpfRaw = lib_mvIMPACT_acquire.idpfRaw | |
| An unprocessed block of data. | |
| idpfRGB101010Packed = lib_mvIMPACT_acquire.idpfRGB101010Packed | |
| A three channel interleaved RGB image occupying 48 bit with 30 bit of usable data per pixel. | |
| idpfRGB121212Packed = lib_mvIMPACT_acquire.idpfRGB121212Packed | |
| A three channel interleaved RGB image occupying 48 bit with 36 bit of usable data per pixel. | |
| idpfRGB141414Packed = lib_mvIMPACT_acquire.idpfRGB141414Packed | |
| A three channel interleaved RGB image occupying 48 bit with 42 bit of usable data per pixel. | |
| idpfRGB161616Packed = lib_mvIMPACT_acquire.idpfRGB161616Packed | |
| A three channel interleaved RGB image occupying 48 bit per pixel. | |
| idpfRGB888Packed = lib_mvIMPACT_acquire.idpfRGB888Packed | |
| A three channel interleaved RGB format containing 24 bit per pixel. | |
| idpfRGB888Planar = lib_mvIMPACT_acquire.idpfRGB888Planar | |
| A three channel planar RGB format. | |
| idpfRGBx888Packed = lib_mvIMPACT_acquire.idpfRGBx888Packed | |
| A four channel interleaved RGB format with 32 bit per pixel containing one alpha byte per pixel. | |
| idpfRGBx888Planar = lib_mvIMPACT_acquire.idpfRGBx888Planar | |
| A four channel planar RGB format. | |
| idpfYUV411_UYYVYY_Packed = lib_mvIMPACT_acquire.idpfYUV411_UYYVYY_Packed | |
| A three channel interleaved YUV format occupying 48 bit for four pixels. | |
| idpfYUV422_10Packed = lib_mvIMPACT_acquire.idpfYUV422_10Packed | |
| A three channel interleaved YUV422 format occupying 64 bit for a pair of pixels. | |
| idpfYUV422_UYVY_10Packed = lib_mvIMPACT_acquire.idpfYUV422_UYVY_10Packed | |
| A three channel interleaved YUV422 format occupying 64 bit for a pair of pixels. | |
| idpfYUV422_UYVYPacked = lib_mvIMPACT_acquire.idpfYUV422_UYVYPacked | |
| A three channel interleaved YUV422 format occupying 32 bit for a pair of pixels. | |
| idpfYUV422Packed = lib_mvIMPACT_acquire.idpfYUV422Packed | |
| A three channel interleaved YUV422 format using 32 bit for a pair of pixels. | |
| idpfYUV422Planar = lib_mvIMPACT_acquire.idpfYUV422Planar | |
| A three channel planar YUV422 format. | |
| idpfYUV444_10Packed = lib_mvIMPACT_acquire.idpfYUV444_10Packed | |
| A three channel interleaved YUV format occupying 48 bit per pixel with 30 bit of usable data per pixel. | |
| idpfYUV444_UYV_10Packed = lib_mvIMPACT_acquire.idpfYUV444_UYV_10Packed | |
| A three channel interleaved YUV format occupying 48 bit per pixel with 30 bit of usable data per pixel. | |
| idpfYUV444_UYVPacked = lib_mvIMPACT_acquire.idpfYUV444_UYVPacked | |
| A three channel interleaved YUV format occupying 24 bit per pixel. | |
| idpfYUV444Packed = lib_mvIMPACT_acquire.idpfYUV444Packed | |
| A three channel interleaved YUV format occupying 24 bit per pixel. | |
| iebForceEnumerate = lib_mvIMPACT_acquire.iebForceEnumerate | |
| The interface will forcefully enumerate devices, regardless of the general enumeration behavior of this interface type(overrides EnumerateEnable setting). | |
| iebForceIgnore = lib_mvIMPACT_acquire.iebForceIgnore | |
| The interface will not enumerate devices, regardless of the general enumeration behavior of this interface type(overrides EnumerateEnable setting). | |
| iebNotConfigured = lib_mvIMPACT_acquire.iebNotConfigured | |
| The interface will enumerate devices or not according to the general enumeration behavior of this interface type(according to EnumerateEnable setting). | |
| iffAuto = lib_mvIMPACT_acquire.iffAuto | |
| Automatically tries to select the file format e.g. | |
| iffBMP = lib_mvIMPACT_acquire.iffBMP | |
| The BMP format. | |
| iffJPEG = lib_mvIMPACT_acquire.iffJPEG | |
| The JPEG format. | |
| iffPNG = lib_mvIMPACT_acquire.iffPNG | |
| The PNG format. | |
| iffTIFF = lib_mvIMPACT_acquire.iffTIFF | |
| The TIFF format. | |
| IM_CUBIC = lib_mvIMPACT_acquire.IM_CUBIC | |
| Cubic interpolation. | |
| IM_LINEAR = lib_mvIMPACT_acquire.IM_LINEAR | |
| Linear interpolation. | |
| IM_NEAREST_NEIGHBOUR = lib_mvIMPACT_acquire.IM_NEAREST_NEIGHBOUR | |
| Nearest neighbor interpolation (default). | |
| imOff = lib_mvIMPACT_acquire.imOff | |
| Disable the interlaced function. | |
| imOn = lib_mvIMPACT_acquire.imOn | |
| Enable the interlaced function. | |
| INVALID_ID = cvar.INVALID_ID | |
| ipfOff = lib_mvIMPACT_acquire.ipfOff | |
| No filter function will be applied to the image. | |
| ipfSharpen = lib_mvIMPACT_acquire.ipfSharpen | |
| A sharpen filter will be applied to the image. | |
| ipmDefault = lib_mvIMPACT_acquire.ipmDefault | |
| The default mode where every image is processed in the order they have been acquired. | |
| ipmProcessLatestOnly = lib_mvIMPACT_acquire.ipmProcessLatestOnly | |
| This mode can be useful for applications where processing on the host takes longer than the average time between two consecutive frames transmitted by the device. | |
| ipoMaximizeSpeed = lib_mvIMPACT_acquire.ipoMaximizeSpeed | |
| Will maximize the execution speed. | |
| ipoMinimizeMemoryUsage = lib_mvIMPACT_acquire.ipoMinimizeMemoryUsage | |
| Will minimize the memory footprint. | |
| iprApplied = lib_mvIMPACT_acquire.iprApplied | |
| This algorithm has been applied to this request object. | |
| iprFailure = lib_mvIMPACT_acquire.iprFailure | |
| A problem was encountered when this algorithm has been applied to this request object. | |
| iprNotActive = lib_mvIMPACT_acquire.iprNotActive | |
| This algorithm was either switched off or not needed when applied to this request object. | |
| iprNotApplicable = lib_mvIMPACT_acquire.iprNotApplicable | |
| This algorithm has NOT been applied because it was not applicable. | |
| iprSkipped = lib_mvIMPACT_acquire.iprSkipped | |
| This algorithm has NOT been applied because of a lack of processing time. | |
| ircmCounting = lib_mvIMPACT_acquire.ircmCounting | |
| Reserved. | |
| ircmLive = lib_mvIMPACT_acquire.ircmLive | |
| Reserved. | |
| ircmManual = lib_mvIMPACT_acquire.ircmManual | |
| The standard mode for image requests. | |
| ircmTrial = lib_mvIMPACT_acquire.ircmTrial | |
| In this mode no 'real' image will be captured, but the whole processing chain will be traversed once. | |
| ircmUpdateBufferLayout = lib_mvIMPACT_acquire.ircmUpdateBufferLayout | |
| In this mode no 'real' image will be captured, but the whole processing chain will be traversed once. | |
| irpCameraOutputUsed = lib_mvIMPACT_acquire.irpCameraOutputUsed | |
| The camera output used to transmit the image from the imaging device to the capture device. | |
| irpPixelFormat = lib_mvIMPACT_acquire.irpPixelFormat | |
| The pixel format of an image request buffer. | |
| irpResult = lib_mvIMPACT_acquire.irpResult | |
| The Result associated with an image request. | |
| irpState = lib_mvIMPACT_acquire.irpState | |
| The current state of an image request. | |
| iscmBayer = lib_mvIMPACT_acquire.iscmBayer | |
| This is a Bayer color sensor. | |
| iscmColor = lib_mvIMPACT_acquire.iscmColor | |
| This is a color sensor. | |
| iscmMono = lib_mvIMPACT_acquire.iscmMono | |
| This is a mono sensor. | |
| iscmNIR = lib_mvIMPACT_acquire.iscmNIR | |
| This is a sensor sensitive in the near IF spectrum only. | |
| iscmUnknown = lib_mvIMPACT_acquire.iscmUnknown | |
| This is an unknown type of sensor. | |
| iscpBlueGreen = lib_mvIMPACT_acquire.iscpBlueGreen | |
| This sensor starts to transmit a green pixel from a green and blue line. | |
| iscpGreenBlue = lib_mvIMPACT_acquire.iscpGreenBlue | |
| This sensor starts to transmit a blue pixel from a green and blue line. | |
| iscpGreenRed = lib_mvIMPACT_acquire.iscpGreenRed | |
| This sensor starts to transmit a green pixel from a green and red line. | |
| iscpRedGreen = lib_mvIMPACT_acquire.iscpRedGreen | |
| This sensor starts to transmit a red pixel from a green and red line. | |
| iscpUnknown = lib_mvIMPACT_acquire.iscpUnknown | |
| Nothing is known about the way the sensor transmits data. | |
| istCCD = lib_mvIMPACT_acquire.istCCD | |
| This is a CCD sensor. | |
| istCMOS = lib_mvIMPACT_acquire.istCMOS | |
| This is a CMOS sensor. | |
| istUnknown = lib_mvIMPACT_acquire.istUnknown | |
| This is an unknown type of sensor. | |
| lcOff = lib_mvIMPACT_acquire.lcOff | |
| Disables line counter. | |
| lcOn = lib_mvIMPACT_acquire.lcOn | |
| Enables line counter. | |
| lqDeviceManager = lib_mvIMPACT_acquire.lqDeviceManager | |
| Specifies the mvDeviceManager library. | |
| lqPropHandling = lib_mvIMPACT_acquire.lqPropHandling | |
| Specifies the mvPropHandling library. | |
| LUTgmLinearStart = lib_mvIMPACT_acquire.LUTgmLinearStart | |
| Maps an image by applying a linear interpolation in the lower intensity range of the LUT and an intensity transformation with gamma correction to the upper intensity range of the LUT. | |
| LUTgmStandard = lib_mvIMPACT_acquire.LUTgmStandard | |
| Default gamma mode. | |
| LUTiHardware = lib_mvIMPACT_acquire.LUTiHardware | |
| The mapping of the image data will be done in hardware. | |
| LUTimCubic = lib_mvIMPACT_acquire.LUTimCubic | |
| Maps an image by applying intensity transformation with cubic interpolation. | |
| LUTimLinear = lib_mvIMPACT_acquire.LUTimLinear | |
| Maps an image by applying intensity transformation with linear interpolation. | |
| LUTimThreshold = lib_mvIMPACT_acquire.LUTimThreshold | |
| Maps an image by applying intensity transformation based on a set of given threshold values. | |
| LUTiSoftware = lib_mvIMPACT_acquire.LUTiSoftware | |
| The mapping of the image data will be done with an optimized software algorithm. | |
| LUTm10To10 = lib_mvIMPACT_acquire.LUTm10To10 | |
| 10 bit input data will be mapped to 10 bit output data. | |
| LUTm10To8 = lib_mvIMPACT_acquire.LUTm10To8 | |
| 10 bit input data will be mapped to 8 bit output data. | |
| LUTm12To10 = lib_mvIMPACT_acquire.LUTm12To10 | |
| 12 bit input data will be mapped to 10 bit output data. | |
| LUTm12To12 = lib_mvIMPACT_acquire.LUTm12To12 | |
| 12 bit input data will be mapped to 12 bit output data. | |
| LUTm14To14 = lib_mvIMPACT_acquire.LUTm14To14 | |
| 14 bit input data will be mapped to 14 bit output data. | |
| LUTm16To16 = lib_mvIMPACT_acquire.LUTm16To16 | |
| 16 bit input data will be mapped to 16 bit output data. | |
| LUTm8To8 = lib_mvIMPACT_acquire.LUTm8To8 | |
| 8 bit input data will be mapped to 8 bit output data. | |
| LUTmDirect = lib_mvIMPACT_acquire.LUTmDirect | |
| Maps an image by applying intensity transformation. | |
| LUTmGamma = lib_mvIMPACT_acquire.LUTmGamma | |
| Maps an image by applying intensity transformation with gamma correction. | |
| LUTmInterpolated = lib_mvIMPACT_acquire.LUTmInterpolated | |
| Maps an image by applying interpolated intensity transformation between a set of given sampling points. | |
| mmLeftRight = lib_mvIMPACT_acquire.mmLeftRight | |
| The resulting image will be flipped around a vertical axis. | |
| mmmAuto = lib_mvIMPACT_acquire.mmmAuto | |
| Automatic mode. | |
| mmmPool = lib_mvIMPACT_acquire.mmmPool | |
| Pool Mode. | |
| mmOff = lib_mvIMPACT_acquire.mmOff | |
| No Mirroring. | |
| mmpmAuto = lib_mvIMPACT_acquire.mmpmAuto | |
| Use Pool in Automatic Mode. | |
| mmpmFixed = lib_mvIMPACT_acquire.mmpmFixed | |
| Use Pool in Manual Mode. | |
| mmpmOff = lib_mvIMPACT_acquire.mmpmOff | |
| Dont use Pool. | |
| mmTopDown = lib_mvIMPACT_acquire.mmTopDown | |
| The resulting image will be flipped around a horizontal axis. | |
| mmTopDownAndLeftRight = lib_mvIMPACT_acquire.mmTopDownAndLeftRight | |
| The resulting image will be both around a horizontal and vertical axis. | |
| momChannelBased = lib_mvIMPACT_acquire.momChannelBased | |
| The mirror mode can be selected for differently for each channel of the image. | |
| momGlobal = lib_mvIMPACT_acquire.momGlobal | |
| There will be a single mode option only and this mode will be applied to all channels of the image. | |
| MVIMPACT_ACQUIRE_BUILD_VERSION = lib_mvIMPACT_acquire.MVIMPACT_ACQUIRE_BUILD_VERSION | |
| Returns the build version number of the current Impact Acquire release. | |
| MVIMPACT_ACQUIRE_MAJOR_VERSION = lib_mvIMPACT_acquire.MVIMPACT_ACQUIRE_MAJOR_VERSION | |
| Returns the major version number of the current Impact Acquire release. | |
| MVIMPACT_ACQUIRE_MINOR_VERSION = lib_mvIMPACT_acquire.MVIMPACT_ACQUIRE_MINOR_VERSION | |
| Returns the minor version number of the current Impact Acquire release. | |
| MVIMPACT_ACQUIRE_RELEASE_VERSION = lib_mvIMPACT_acquire.MVIMPACT_ACQUIRE_RELEASE_VERSION | |
| Returns the release version number of the current Impact Acquire release. | |
| MVIMPACT_ACQUIRE_VERSION_STRING = lib_mvIMPACT_acquire.MVIMPACT_ACQUIRE_VERSION_STRING | |
| Returns the full version number of the current Impact Acquire release as a string ("3.7.1.4470"). | |
| object = obj__ | |
| obmmDefault = lib_mvIMPACT_acquire.obmmDefault | |
| The device will work with reasonable default values. | |
| obmmUser = lib_mvIMPACT_acquire.obmmUser | |
| The user can define how the on board memory of the device will be used. | |
| plMaxValue = lib_mvIMPACT_acquire.plMaxValue | |
| Set/Get the maximum value for this mvIMPACT.acquire.Property. | |
| plMinValue = lib_mvIMPACT_acquire.plMinValue | |
| Set/Get the minimum value for this mvIMPACT.acquire.Property. | |
| plStepWidth = lib_mvIMPACT_acquire.plStepWidth | |
| Set/Get the step width value for this mvIMPACT.acquire.Property. | |
| primLinear = lib_mvIMPACT_acquire.primLinear | |
| Linear interpolation. | |
| primOff = lib_mvIMPACT_acquire.primOff | |
| No interpolation. | |
| prm2By2 = lib_mvIMPACT_acquire.prm2By2 | |
| The pixels will be re-arranged in a way the image keeps its original dimension but each polarization angle will afterwards occupy a certain section in the image. | |
| prmExtractAngle = lib_mvIMPACT_acquire.prmExtractAngle | |
| The angle of the maximum polarization for every '2 * 2' region in the image will be calculated and the resulting value will then be mapped to the value range of the source pixel format. | |
| prmExtractDegree = lib_mvIMPACT_acquire.prmExtractDegree | |
| The degree of the polarization for every '2 * 2' region in the image will be calculated and the resulting value will then be mapped to the value range of the source pixel format. | |
| prmExtractSingle = lib_mvIMPACT_acquire.prmExtractSingle | |
| The pixel selected by 'PolarizedDataExtractionChannelIndex' will be extracted and forwarded from each region defined by '2 * 2'. | |
| prmHorizontal = lib_mvIMPACT_acquire.prmHorizontal | |
| The pixels will be re-arranged one after the other thus the resulting image will have a width of 'input image width * 2' and a height of 'input image height / 2'. | |
| prmMeanValue = lib_mvIMPACT_acquire.prmMeanValue | |
| The mean value of all pixels whose value ranges from 'PolarizedDataExtractionLowerLimit' to 'PolarizedDataExtractionUpperLimit' will be calculated within each region defined by '2 * 2' in the source image and will be forwarded as a single new pixel in the destination image. | |
| prmMinimumValue = lib_mvIMPACT_acquire.prmMinimumValue | |
| The pixel with the minimum value will be extracted and forwarded from each region defined by '2 * 2'. | |
| prmPseudoColorRepresentation = lib_mvIMPACT_acquire.prmPseudoColorRepresentation | |
| The angle of the maximum polarization and the degree of the polarization for every '2 * 2' region in the image will be calculated and the resulting value will then be mapped to the value range of and 8-bit HSL image. | |
| prmVertical = lib_mvIMPACT_acquire.prmVertical | |
| The pixels will be re-arranged one after the other thus the resulting image will have a width of 'input image width / 2' and a height of 'input image height * 2'. | |
| PROPHANDLING_ACCESSTOKEN_CREATION_FAILED = lib_mvIMPACT_acquire.PROPHANDLING_ACCESSTOKEN_CREATION_FAILED | |
| An access token object couldn't be created. | |
| PROPHANDLING_CANT_ALLOCATE_LIST = lib_mvIMPACT_acquire.PROPHANDLING_CANT_ALLOCATE_LIST | |
| This error will occur when the modules internal representation of the tree structure does not allow the allocation of a new list. | |
| PROPHANDLING_CANT_REGISTER_COMPONENT = lib_mvIMPACT_acquire.PROPHANDLING_CANT_REGISTER_COMPONENT | |
| The referenced list has no space left to register this component at the desired position. | |
| PROPHANDLING_CANT_SERIALIZE_DATA = lib_mvIMPACT_acquire.PROPHANDLING_CANT_SERIALIZE_DATA | |
| The user tried to save(serialize) a property list without having the right to do this. | |
| PROPHANDLING_COMPONENT_ALREADY_REGISTERED = lib_mvIMPACT_acquire.PROPHANDLING_COMPONENT_ALREADY_REGISTERED | |
| It has been tried to register the same component at twice in the same list. | |
| PROPHANDLING_COMPONENT_HAS_OWNER_ALREADY = lib_mvIMPACT_acquire.PROPHANDLING_COMPONENT_HAS_OWNER_ALREADY | |
| The specified component already has an owner. | |
| PROPHANDLING_COMPONENT_ID_INVALID = lib_mvIMPACT_acquire.PROPHANDLING_COMPONENT_ID_INVALID | |
| An invalid component within a list has been referenced. | |
| PROPHANDLING_COMPONENT_NO_CALLBACK_REGISTERED = lib_mvIMPACT_acquire.PROPHANDLING_COMPONENT_NO_CALLBACK_REGISTERED | |
| The user tried to modify a registered callback, but no callback has been registered for this component. | |
| PROPHANDLING_COMPONENT_NOT_FOUND = lib_mvIMPACT_acquire.PROPHANDLING_COMPONENT_NOT_FOUND | |
| The specified component could not be found. | |
| PROPHANDLING_IMPLEMENTATION_MISSING = lib_mvIMPACT_acquire.PROPHANDLING_IMPLEMENTATION_MISSING | |
| A feature that is not implemented so far has been requested. | |
| PROPHANDLING_INCOMPATIBLE_COMPONENTS = lib_mvIMPACT_acquire.PROPHANDLING_INCOMPATIBLE_COMPONENTS | |
| The two involved components are not compatible. | |
| PROPHANDLING_INPUT_BUFFER_TOO_SMALL = lib_mvIMPACT_acquire.PROPHANDLING_INPUT_BUFFER_TOO_SMALL | |
| The user tried to read data into a user supplied storage location, but the buffer was too small to accommodate the result. | |
| PROPHANDLING_INVALID_FILE_CONTENT = lib_mvIMPACT_acquire.PROPHANDLING_INVALID_FILE_CONTENT | |
| The user tried to use a file to update or create a component list, that does not contain valid data for this operation. | |
| PROPHANDLING_INVALID_INPUT_PARAMETER = lib_mvIMPACT_acquire.PROPHANDLING_INVALID_INPUT_PARAMETER | |
| A invalid input parameter has been passed to a function of this module. | |
| PROPHANDLING_INVALID_PROP_VALUE = lib_mvIMPACT_acquire.PROPHANDLING_INVALID_PROP_VALUE | |
| It has been tried to assign an invalid value to a property. | |
| PROPHANDLING_INVALID_PROP_VALUE_TYPE = lib_mvIMPACT_acquire.PROPHANDLING_INVALID_PROP_VALUE_TYPE | |
| An invalid value has been passed to the property. | |
| PROPHANDLING_LAST_VALID_ERROR_CODE = lib_mvIMPACT_acquire.PROPHANDLING_LAST_VALID_ERROR_CODE | |
| Defines the last valid error code value for the property module. | |
| PROPHANDLING_LIST_CANT_ACCESS_DATA = lib_mvIMPACT_acquire.PROPHANDLING_LIST_CANT_ACCESS_DATA | |
| The desired data can't be accessed or found. | |
| PROPHANDLING_LIST_ENTRY_OCCUPIED = lib_mvIMPACT_acquire.PROPHANDLING_LIST_ENTRY_OCCUPIED | |
| The specified list index is occupied. | |
| PROPHANDLING_LIST_ID_INVALID = lib_mvIMPACT_acquire.PROPHANDLING_LIST_ID_INVALID | |
| An invalid list has been referenced. | |
| PROPHANDLING_METHOD_INVALID_PARAM_LIST = lib_mvIMPACT_acquire.PROPHANDLING_METHOD_INVALID_PARAM_LIST | |
| A method object has an invalid parameter list. | |
| PROPHANDLING_METHOD_PTR_INVALID = lib_mvIMPACT_acquire.PROPHANDLING_METHOD_PTR_INVALID | |
| The function pointer of the referenced method object is invalid. | |
| PROPHANDLING_NO_ERROR = lib_mvIMPACT_acquire.PROPHANDLING_NO_ERROR | |
| The operation has been executed successfully. | |
| PROPHANDLING_NO_MODIFY_SIZE_RIGHTS = lib_mvIMPACT_acquire.PROPHANDLING_NO_MODIFY_SIZE_RIGHTS | |
| The caller can't modify the size of this component. | |
| PROPHANDLING_NO_READ_RIGHTS = lib_mvIMPACT_acquire.PROPHANDLING_NO_READ_RIGHTS | |
| The caller has no read rights for this component. | |
| PROPHANDLING_NO_WRITE_RIGHTS = lib_mvIMPACT_acquire.PROPHANDLING_NO_WRITE_RIGHTS | |
| The caller has no write rights for this component. | |
| PROPHANDLING_NOT_A_LIST = lib_mvIMPACT_acquire.PROPHANDLING_NOT_A_LIST | |
| This component is not a list. | |
| PROPHANDLING_NOT_A_METHOD = lib_mvIMPACT_acquire.PROPHANDLING_NOT_A_METHOD | |
| This component is not a method. | |
| PROPHANDLING_NOT_A_PROPERTY = lib_mvIMPACT_acquire.PROPHANDLING_NOT_A_PROPERTY | |
| This component is not a property. | |
| PROPHANDLING_PROP_TRANSLATION_TABLE_CORRUPTED = lib_mvIMPACT_acquire.PROPHANDLING_PROP_TRANSLATION_TABLE_CORRUPTED | |
| The properties translation table has been corrupted. | |
| PROPHANDLING_PROP_TRANSLATION_TABLE_NOT_DEFINED = lib_mvIMPACT_acquire.PROPHANDLING_PROP_TRANSLATION_TABLE_NOT_DEFINED | |
| This property doesn't define a translation table. | |
| PROPHANDLING_PROP_VAL_ID_OUT_OF_BOUNDS = lib_mvIMPACT_acquire.PROPHANDLING_PROP_VAL_ID_OUT_OF_BOUNDS | |
| Invalid value index. | |
| PROPHANDLING_PROP_VAL_TOO_LARGE = lib_mvIMPACT_acquire.PROPHANDLING_PROP_VAL_TOO_LARGE | |
| A too large value has been passed. | |
| PROPHANDLING_PROP_VAL_TOO_SMALL = lib_mvIMPACT_acquire.PROPHANDLING_PROP_VAL_TOO_SMALL | |
| A too small value has been passed. | |
| PROPHANDLING_PROP_VALIDATION_FAILED = lib_mvIMPACT_acquire.PROPHANDLING_PROP_VALIDATION_FAILED | |
| The user tried to assign a value to a property, that is invalid. | |
| PROPHANDLING_SIZE_MISMATCH = lib_mvIMPACT_acquire.PROPHANDLING_SIZE_MISMATCH | |
| Different sized value buffers have been passed. | |
| PROPHANDLING_SWIG_ERROR = lib_mvIMPACT_acquire.PROPHANDLING_SWIG_ERROR | |
| This indicates an internal error occurred within the SWIG generated wrapper code, when working under Python. | |
| PROPHANDLING_UNSUPPORTED_OPERATION = lib_mvIMPACT_acquire.PROPHANDLING_UNSUPPORTED_OPERATION | |
| The user tried to execute an operation, which is not supported by the component he is referring to. | |
| PROPHANDLING_UNSUPPORTED_PARAMETER = lib_mvIMPACT_acquire.PROPHANDLING_UNSUPPORTED_PARAMETER | |
| One or more of the specified parameters are not supported by the function. | |
| PROPHANDLING_WRONG_PARAM_COUNT = lib_mvIMPACT_acquire.PROPHANDLING_WRONG_PARAM_COUNT | |
| The number of parameters is incorrect. | |
| pstDigitalSignal = lib_mvIMPACT_acquire.pstDigitalSignal | |
| Changes on one or more digital inputs will trigger the output of the pulse or pulse sequence. | |
| pstPeriodically = lib_mvIMPACT_acquire.pstPeriodically | |
| The output of a pulse or pulse sequence will be done periodically. | |
| pstRotaryDecoder = lib_mvIMPACT_acquire.pstRotaryDecoder | |
| The output of a rotary decoder will trigger the output of the pulse or pulse sequence. | |
| pt2DImage = lib_mvIMPACT_acquire.pt2DImage | |
| Color or monochrome (2D) image. | |
| ptChunkOnly = lib_mvIMPACT_acquire.ptChunkOnly | |
| Chunk data only. | |
| ptGenDC = lib_mvIMPACT_acquire.ptGenDC | |
| GenDC data. | |
| ptH264 = lib_mvIMPACT_acquire.ptH264 | |
| H.264 image data. | |
| ptJPEG = lib_mvIMPACT_acquire.ptJPEG | |
| JPEG image data. | |
| ptJPEG2000 = lib_mvIMPACT_acquire.ptJPEG2000 | |
| JPEG 2000 image data. | |
| ptMultiPart = lib_mvIMPACT_acquire.ptMultiPart | |
| Multi-Part data. | |
| ptUnknown = lib_mvIMPACT_acquire.ptUnknown | |
| The framework is not aware of the data type of this request. | |
| rimmAuto = lib_mvIMPACT_acquire.rimmAuto | |
| Automatic mode. | |
| rimmUser = lib_mvIMPACT_acquire.rimmUser | |
| User supplied memory mode. | |
| ROOT_LIST = cvar.ROOT_LIST | |
| rrCameraNotSupported = lib_mvIMPACT_acquire.rrCameraNotSupported | |
| The current camera description is not supported by the capture device. | |
| rrDataAcquisitionNotSupported = lib_mvIMPACT_acquire.rrDataAcquisitionNotSupported | |
| The device does not support capturing data in the current configuration. | |
| rrDeviceAccessLost = lib_mvIMPACT_acquire.rrDeviceAccessLost | |
| The access to the device has been lost. | |
| rrError = lib_mvIMPACT_acquire.rrError | |
| An error occurred during the processing of this request. | |
| rrFrameCorrupt = lib_mvIMPACT_acquire.rrFrameCorrupt | |
| The device has reported that an image acquisition did fail on the device side thus BEFORE the data transfer. | |
| rrFrameIncomplete = lib_mvIMPACT_acquire.rrFrameIncomplete | |
| An incomplete frame was transferred. | |
| rrInconsistentBufferContent = lib_mvIMPACT_acquire.rrInconsistentBufferContent | |
| A complete buffer has been delivered, but it did fail to pass the internal validation check. | |
| rrNoBufferAvailable = lib_mvIMPACT_acquire.rrNoBufferAvailable | |
| No free buffer available to process this request. | |
| rrNotEnoughMemory = lib_mvIMPACT_acquire.rrNotEnoughMemory | |
| There is not enough memory available to the driver to process the current image request. | |
| rrOK = lib_mvIMPACT_acquire.rrOK | |
| This image request has been processed successfully. | |
| rrRequestAborted = lib_mvIMPACT_acquire.rrRequestAborted | |
| This request has been aborted either because there are no free internal buffers or the user itself caused this abort e.g. | |
| rrTimeout = lib_mvIMPACT_acquire.rrTimeout | |
| This image request resulted in a timeout. | |
| rrUnprocessibleRequest = lib_mvIMPACT_acquire.rrUnprocessibleRequest | |
| This request is not processible. | |
| rsBeingConfigured = lib_mvIMPACT_acquire.rsBeingConfigured | |
| This mvIMPACT.acquire.Request is currently in configuration mode. | |
| rsCapturing = lib_mvIMPACT_acquire.rsCapturing | |
| This mvIMPACT.acquire.Request is currently being processed. | |
| rsIdle = lib_mvIMPACT_acquire.rsIdle | |
| This mvIMPACT.acquire.Request is currently unused. | |
| rsReady = lib_mvIMPACT_acquire.rsReady | |
| This mvIMPACT.acquire.Request has been processed. | |
| rsWaiting = lib_mvIMPACT_acquire.rsWaiting | |
| This mvIMPACT.acquire.Request has been sent into the framework's image request queue and currently awaits processing. | |
| rtctrlModeRun = lib_mvIMPACT_acquire.rtctrlModeRun | |
| RTC switched on and NOT editable. | |
| rtctrlModeRunRestart = lib_mvIMPACT_acquire.rtctrlModeRunRestart | |
| RTC switched on and restart after changes. | |
| rtctrlModeStop = lib_mvIMPACT_acquire.rtctrlModeStop | |
| RTC switched off and editable. | |
| rtctrlProgExposeReset = lib_mvIMPACT_acquire.rtctrlProgExposeReset | |
| Reset internal expose signal of the sensor controller. | |
| rtctrlProgExposeSet = lib_mvIMPACT_acquire.rtctrlProgExposeSet | |
| Set internal expose signal of the sensor controller. | |
| rtctrlProgFrameNrReset = lib_mvIMPACT_acquire.rtctrlProgFrameNrReset | |
| Reset internal sensor frame counter. | |
| rtctrlProgJumpLoc = lib_mvIMPACT_acquire.rtctrlProgJumpLoc | |
| Jump to location. | |
| rtctrlProgJumpLocOnNotZero = lib_mvIMPACT_acquire.rtctrlProgJumpLocOnNotZero | |
| Jump to location if a certain register differs from zero. | |
| rtctrlProgJumpLocOnZero = lib_mvIMPACT_acquire.rtctrlProgJumpLocOnZero | |
| Jump to location if a certain register contains zero. | |
| rtctrlProgNop = lib_mvIMPACT_acquire.rtctrlProgNop | |
| Do nothing. | |
| rtctrlProgRegisterAdd = lib_mvIMPACT_acquire.rtctrlProgRegisterAdd | |
| Add a constant value to a register. | |
| rtctrlProgRegisterSet = lib_mvIMPACT_acquire.rtctrlProgRegisterSet | |
| Set a registers value. | |
| rtctrlProgRegisterSub = lib_mvIMPACT_acquire.rtctrlProgRegisterSub | |
| Subtract a constant value from a register. | |
| rtctrlProgSetDigout = lib_mvIMPACT_acquire.rtctrlProgSetDigout | |
| Set digital outputs. | |
| rtctrlProgTriggerReset = lib_mvIMPACT_acquire.rtctrlProgTriggerReset | |
| Reset internal trigger signal of the sensor controller. | |
| rtctrlProgTriggerSet = lib_mvIMPACT_acquire.rtctrlProgTriggerSet | |
| Set internal trigger signal of the sensor controller. | |
| rtctrlProgWaitClocks = lib_mvIMPACT_acquire.rtctrlProgWaitClocks | |
| Wait for n clocks. | |
| rtctrlProgWaitDigin = lib_mvIMPACT_acquire.rtctrlProgWaitDigin | |
| Wait for digital inputs. | |
| rtmFullResolution = lib_mvIMPACT_acquire.rtmFullResolution | |
| Request transmission of an image in full resolution. | |
| scAnalogue = lib_mvIMPACT_acquire.scAnalogue | |
| The scan clock is generated by genlocking on horizontal sync. | |
| scAuto = lib_mvIMPACT_acquire.scAuto | |
| The cameras clock signal is used. | |
| scDigital = lib_mvIMPACT_acquire.scDigital | |
| The scan clock is generated digitally. | |
| sfCreateMissingEntries = lib_mvIMPACT_acquire.sfCreateMissingEntries | |
| If set ALL entries in the store data will be created. | |
| sfDefault = lib_mvIMPACT_acquire.sfDefault | |
| A dummy flag to specify the default behaviour. | |
| sfDontProcessDefault = lib_mvIMPACT_acquire.sfDontProcessDefault | |
| Specifies if the 'is-default' flag for components shall be ignored during import/export operations. | |
| sfFile = lib_mvIMPACT_acquire.sfFile | |
| Stores/loads the setting in/from an XML file. | |
| sfIgnoreBasicData = lib_mvIMPACT_acquire.sfIgnoreBasicData | |
| Specifies if basic data shall be processed. | |
| sfIgnoreInvisible = lib_mvIMPACT_acquire.sfIgnoreInvisible | |
| Specifies if invisible components shall be processed. | |
| sfIgnorePropData = lib_mvIMPACT_acquire.sfIgnorePropData | |
| If set data for properties will no be updated. | |
| sfNative = lib_mvIMPACT_acquire.sfNative | |
| Stores/loads the setting in/from a platform dependent location. | |
| sfProcessDisplayName = lib_mvIMPACT_acquire.sfProcessDisplayName | |
| If set the display name will be processed. | |
| sfProcessDocString = lib_mvIMPACT_acquire.sfProcessDocString | |
| If set the documentation string will be processed. | |
| sfProcessGenICamSequencerData = lib_mvIMPACT_acquire.sfProcessGenICamSequencerData | |
| Processes GenICam sequencer set related data during a storage operation. | |
| sfProcessGenICamUserSetData = lib_mvIMPACT_acquire.sfProcessGenICamUserSetData | |
| Processes GenICam user set related data during a storage operation. | |
| sfProcessInheritance = lib_mvIMPACT_acquire.sfProcessInheritance | |
| If set the lists inheritance relationship will be processed. | |
| sfProcessPropConstantsDict = lib_mvIMPACT_acquire.sfProcessPropConstantsDict | |
| If set the defined constants for properties will be processed. | |
| sfProcessPropTranslationDict = lib_mvIMPACT_acquire.sfProcessPropTranslationDict | |
| If set properties translation dictionaries will be processed for this import/export operation. | |
| sfProcessReadOnlyComponents = lib_mvIMPACT_acquire.sfProcessReadOnlyComponents | |
| If set read-only components will be processed for this import/export operation. | |
| sfRAM = lib_mvIMPACT_acquire.sfRAM | |
| Stores/loads the setting in/from RAM file. | |
| sfRaw = lib_mvIMPACT_acquire.sfRaw | |
| Stores/loads the setting in raw mode. | |
| sfVolatile = lib_mvIMPACT_acquire.sfVolatile | |
| Stores lists volatile. | |
| sGlobal = lib_mvIMPACT_acquire.sGlobal | |
| Save the setting as global as possible. | |
| simCubic = lib_mvIMPACT_acquire.simCubic | |
| Cubic interpolation. | |
| simLinear = lib_mvIMPACT_acquire.simLinear | |
| Linear interpolation. | |
| simNearestNeighbor = lib_mvIMPACT_acquire.simNearestNeighbor | |
| Nearest neighbor interpolation (default). | |
| slFile = lib_mvIMPACT_acquire.slFile | |
| Stores/loads the setting in/from an XML file. | |
| slNative = lib_mvIMPACT_acquire.slNative | |
| Stores/loads the setting in/from a platform dependent location. | |
| slNative_Raw = lib_mvIMPACT_acquire.slNative_Raw | |
| Stores/loads the setting in/from a platform dependent location. | |
| slRAM = lib_mvIMPACT_acquire.slRAM | |
| Stores/loads the setting in/from RAM file. | |
| smIgnoreLists = cvar.smIgnoreLists | |
| smIgnoreMethods = cvar.smIgnoreMethods | |
| smIgnoreProperties = cvar.smIgnoreProperties | |
| smOff = lib_mvIMPACT_acquire.smOff | |
| The scaler is switched off (default). | |
| smOn = lib_mvIMPACT_acquire.smOn | |
| The scaler is switched on. | |
| ssITU601 = lib_mvIMPACT_acquire.ssITU601 | |
| 720 x 576 Pixels for 50 Hz standard cameras, 720 x 480 Pixels for 60 Hz standard cameras. | |
| sspBinningHorizontal = lib_mvIMPACT_acquire.sspBinningHorizontal | |
| Requests the BinningHorizontal property to be modified in a user selected sequencer set. | |
| sspBinningVertical = lib_mvIMPACT_acquire.sspBinningVertical | |
| Requests the BinningVertical property to be modified in a user selected sequencer set. | |
| sspCounterDuration_Counter1 = lib_mvIMPACT_acquire.sspCounterDuration_Counter1 | |
| Requests the CounterDuration[CounterSelector=Counter1] property to be modified in a user selected sequencer set. | |
| sspCounterDuration_Counter2 = lib_mvIMPACT_acquire.sspCounterDuration_Counter2 | |
| Requests the CounterDuration[CounterSelector=Counter2] property to be modified in a user selected sequencer set. | |
| sspCounterDuration_Counter3 = lib_mvIMPACT_acquire.sspCounterDuration_Counter3 | |
| Requests the CounterDuration[CounterSelector=Counter3] property to be modified in a user selected sequencer set. | |
| sspCounterDuration_Counter4 = lib_mvIMPACT_acquire.sspCounterDuration_Counter4 | |
| Requests the CounterDuration[CounterSelector=Counter4] property to be modified in a user selected sequencer set. | |
| sspCounterDuration_Counter5 = lib_mvIMPACT_acquire.sspCounterDuration_Counter5 | |
| Requests the CounterDuration[CounterSelector=Counter5] property to be modified in a user selected sequencer set. | |
| sspCounterDuration_Counter6 = lib_mvIMPACT_acquire.sspCounterDuration_Counter6 | |
| Requests the CounterDuration[CounterSelector=Counter6] property to be modified in a user selected sequencer set. | |
| sspCounterDuration_Counter7 = lib_mvIMPACT_acquire.sspCounterDuration_Counter7 | |
| Requests the CounterDuration[CounterSelector=Counter7] property to be modified in a user selected sequencer set. | |
| sspCounterDuration_Counter8 = lib_mvIMPACT_acquire.sspCounterDuration_Counter8 | |
| Requests the CounterDuration[CounterSelector=Counter8] property to be modified in a user selected sequencer set. | |
| sspDecimationHorizontal = lib_mvIMPACT_acquire.sspDecimationHorizontal | |
| Requests the DecimationHorizontal property to be modified in a user selected sequencer set. | |
| sspDecimationVertical = lib_mvIMPACT_acquire.sspDecimationVertical | |
| Requests the DecimationVertical property to be modified in a user selected sequencer set. | |
| sspExposureTime = lib_mvIMPACT_acquire.sspExposureTime | |
Requests the ExposureTime property to be modified in a user selected sequencer set. | |
| sspGain_AnalogAll = lib_mvIMPACT_acquire.sspGain_AnalogAll | |
| Requests the Gain[GainSelector=AnalogAll] property to be modified in a user selected sequencer set. | |
| sspGain_AnalogBlue = lib_mvIMPACT_acquire.sspGain_AnalogBlue | |
| Requests the Gain[GainSelector=AnalogBlue] property to be modified in a user selected sequencer set. | |
| sspGain_AnalogGreen = lib_mvIMPACT_acquire.sspGain_AnalogGreen | |
| Requests the Gain[GainSelector=AnalogGreen] property to be modified in a user selected sequencer set. | |
| sspGain_AnalogRed = lib_mvIMPACT_acquire.sspGain_AnalogRed | |
| Requests the Gain[GainSelector=AnalogRed] property to be modified in a user selected sequencer set. | |
| sspGain_AnalogTap1 = lib_mvIMPACT_acquire.sspGain_AnalogTap1 | |
| Requests the Gain[GainSelector=AnalogTap1] property to be modified in a user selected sequencer set. | |
| sspGain_AnalogTap2 = lib_mvIMPACT_acquire.sspGain_AnalogTap2 | |
| Requests the Gain[GainSelector=AnalogTap2] property to be modified in a user selected sequencer set. | |
| sspGain_AnalogTap3 = lib_mvIMPACT_acquire.sspGain_AnalogTap3 | |
| Requests the Gain[GainSelector=AnalogTap3] property to be modified in a user selected sequencer set. | |
| sspGain_AnalogTap4 = lib_mvIMPACT_acquire.sspGain_AnalogTap4 | |
| Requests the Gain[GainSelector=AnalogTap4] property to be modified in a user selected sequencer set. | |
| sspHeight = lib_mvIMPACT_acquire.sspHeight | |
| Requests the Height property to be modified in a user selected sequencer set. | |
| sspOffsetX = lib_mvIMPACT_acquire.sspOffsetX | |
| Requests the OffsetX property to be modified in a user selected sequencer set. | |
| sspOffsetY = lib_mvIMPACT_acquire.sspOffsetY | |
| Requests the OffsetY property to be modified in a user selected sequencer set. | |
| sspWidth = lib_mvIMPACT_acquire.sspWidth | |
| Requests the Width property to be modified in a user selected sequencer set. | |
| ssSquare = lib_mvIMPACT_acquire.ssSquare | |
| 768 x 576 Pixels for 50 Hz standard cameras, 640 x 480 Pixels for 60 Hz standard cameras. | |
| ssUser = lib_mvIMPACT_acquire.ssUser | |
| The user can define scan rate and camera AOI. | |
| sUser = lib_mvIMPACT_acquire.sUser | |
| Save the setting in a user specific location. | |
| tmOnFallingEdge = lib_mvIMPACT_acquire.tmOnFallingEdge | |
| A falling edge will trigger the event. | |
| tmOnRisingEdge = lib_mvIMPACT_acquire.tmOnRisingEdge | |
| A rising edge will trigger the event. | |
| udarFull = lib_mvIMPACT_acquire.udarFull | |
| Combines all other flags. | |
| udarPassword = lib_mvIMPACT_acquire.udarPassword | |
| A password is needed to modify this entry. | |
| udarRead = lib_mvIMPACT_acquire.udarRead | |
| The user has read rights for this entry. | |
| udarRW = lib_mvIMPACT_acquire.udarRW | |
| Just combines mvIMPACT.acquire.udarRead and mvIMPACT.acquire.udarWrite. | |
| udarWrite = lib_mvIMPACT_acquire.udarWrite | |
| The user has principle write rights for this entry. | |
| udrbKeepCachedData = lib_mvIMPACT_acquire.udrbKeepCachedData | |
| Keep the data currently buffered in the properties describing the user data. | |
| udrbUpdateFromDeviceData = lib_mvIMPACT_acquire.udrbUpdateFromDeviceData | |
| Updates the properties describing the user data with the fresh data as read from the devices non-volatile memory. | |
| urDevAlreadyInUse = lib_mvIMPACT_acquire.urDevAlreadyInUse | |
| The requested update couldn't be performed as the device is already in use. | |
| urGetUserDataReadError = lib_mvIMPACT_acquire.urGetUserDataReadError | |
| Reading user data from an mvIMPACT.acquire.Device failed. | |
| urNoUpdatePerformed = lib_mvIMPACT_acquire.urNoUpdatePerformed | |
| No update has been performed for this mvIMPACT.acquire.Device. | |
| urSetDevID = lib_mvIMPACT_acquire.urSetDevID | |
| The mvIMPACT.acquire.Device is currently setting device ID. | |
| urSetDevIDError = lib_mvIMPACT_acquire.urSetDevIDError | |
| The mvIMPACT.acquire.Device signaled an error when setting device ID. | |
| urSetDevIDInvalidID = lib_mvIMPACT_acquire.urSetDevIDInvalidID | |
| An invalid device ID has been specified. | |
| urSetDevIDOK = lib_mvIMPACT_acquire.urSetDevIDOK | |
| The mvIMPACT.acquire.Device has successfully been assigned a new ID. | |
| urSetUserDataSizeError = lib_mvIMPACT_acquire.urSetUserDataSizeError | |
| Size Error in writing User Data to mvIMPACT.acquire.Device . | |
| urSetUserDataWriteError = lib_mvIMPACT_acquire.urSetUserDataWriteError | |
| Write Error in writing User Data to mvIMPACT.acquire.Device . | |
| urSetUserDataWriteOK = lib_mvIMPACT_acquire.urSetUserDataWriteOK | |
| Writing user data to mvIMPACT.acquire.Device was successful. | |
| urUpdateFW = lib_mvIMPACT_acquire.urUpdateFW | |
| The mvIMPACT.acquire.Device is currently updating firmware. | |
| urUpdateFWError = lib_mvIMPACT_acquire.urUpdateFWError | |
| The mvIMPACT.acquire.Device indicates an error during updating firmware. | |
| urUpdateFWOK = lib_mvIMPACT_acquire.urUpdateFWOK | |
| The mvIMPACT.acquire.Device indicates that the firmware has been updated successfully. | |
| urVerifyFWError = lib_mvIMPACT_acquire.urVerifyFWError | |
| The mvIMPACT.acquire.Device indicates an error during verifying firmware. | |
| urVerifyFWOK = lib_mvIMPACT_acquire.urVerifyFWOK | |
| The mvIMPACT.acquire.Device indicates that the firmware has been verified successfully. | |
| vcH264 = lib_mvIMPACT_acquire.vcH264 | |
| H264. | |
| vcH265 = lib_mvIMPACT_acquire.vcH265 | |
| H265. | |
| vcMPEG2 = lib_mvIMPACT_acquire.vcMPEG2 | |
| MPEG2. | |
| vditALL = lib_mvIMPACT_acquire.vditALL | |
| Will capture all supported image formats. | |
| vditBMP = lib_mvIMPACT_acquire.vditBMP | |
| Will capture BMP files. | |
| vditJPG = lib_mvIMPACT_acquire.vditJPG | |
| Will capture JPG files. | |
| vditNone = lib_mvIMPACT_acquire.vditNone | |
| Will capture none of the recognized image formats. | |
| vditPGM = lib_mvIMPACT_acquire.vditPGM | |
| Will capture PGM files. | |
| vditPNG = lib_mvIMPACT_acquire.vditPNG | |
| Will capture PNG files. | |
| vditTIFF = lib_mvIMPACT_acquire.vditTIFF | |
| Will capture TIFF files. | |
| vdtmBayerWhiteBalanceTestImage = lib_mvIMPACT_acquire.vdtmBayerWhiteBalanceTestImage | |
| Will generate a still Bayer test pattern that can be used for white balancing. | |
| vdtmEmptyMonoBuffer = lib_mvIMPACT_acquire.vdtmEmptyMonoBuffer | |
| Will just allocate but not initialize a mono buffer. | |
| vdtmHorizontalBayer12Packed_V1Ramp = lib_mvIMPACT_acquire.vdtmHorizontalBayer12Packed_V1Ramp | |
| Will generate a horizontal Bayer ramp with pixel format mvIMPACT.acquire.ibpfMono12Packed_V1. | |
| vdtmHorizontalBayer12Packed_V2Ramp = lib_mvIMPACT_acquire.vdtmHorizontalBayer12Packed_V2Ramp | |
| Will generate a horizontal Bayer ramp with pixel format mvIMPACT.acquire.ibpfMono12Packed_V2. | |
| vdtmHorizontalMono12Packed_V1Ramp = lib_mvIMPACT_acquire.vdtmHorizontalMono12Packed_V1Ramp | |
| Will generate a horizontal mono ramp with pixel format mvIMPACT.acquire.ibpfMono12Packed_V1. | |
| vdtmHorizontalMono12Packed_V2Ramp = lib_mvIMPACT_acquire.vdtmHorizontalMono12Packed_V2Ramp | |
| Will generate a horizontal mono ramp with pixel format mvIMPACT.acquire.ibpfMono12Packed_V2. | |
| vdtmHorizontalMonoRamp = lib_mvIMPACT_acquire.vdtmHorizontalMonoRamp | |
| Will generate a horizontal mono ramp. | |
| vdtmHotAndColdPixelTestImageBayer = lib_mvIMPACT_acquire.vdtmHotAndColdPixelTestImageBayer | |
| Will generate a still Bayer test pattern for hot and cold pixel calibration. | |
| vdtmHotAndColdPixelTestImageRGB888Packed = lib_mvIMPACT_acquire.vdtmHotAndColdPixelTestImageRGB888Packed | |
| Will generate a still RGB8 test pattern for hot and cold pixel calibration. | |
| vdtmImageDirectory = lib_mvIMPACT_acquire.vdtmImageDirectory | |
| Will capture images from a user supplied directory. | |
| vdtmLeakyPixelTestImageMono8Bayer = lib_mvIMPACT_acquire.vdtmLeakyPixelTestImageMono8Bayer | |
| Will generate a still 8 bit Bayer test pattern for leaky pixel calibration. | |
| vdtmMovingBayerDataRamp = lib_mvIMPACT_acquire.vdtmMovingBayerDataRamp | |
| Will generate a moving Bayer test pattern. | |
| vdtmMovingBGR888PackedImage = lib_mvIMPACT_acquire.vdtmMovingBGR888PackedImage | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfBGR888Packed. | |
| vdtmMovingBGRPacked_V2Image = lib_mvIMPACT_acquire.vdtmMovingBGRPacked_V2Image | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfBGR101010Packed_V2. | |
| vdtmMovingMonoRamp = lib_mvIMPACT_acquire.vdtmMovingMonoRamp | |
| Will generate a moving horizontal test pattern with a mono pixel format. | |
| vdtmMovingRGB101010PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGB101010PackedImage | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB101010Packed. | |
| vdtmMovingRGB121212PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGB121212PackedImage | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB121212Packed. | |
| vdtmMovingRGB141414PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGB141414PackedImage | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB141414Packed. | |
| vdtmMovingRGB161616PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGB161616PackedImage | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB161616Packed. | |
| vdtmMovingRGB888PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGB888PackedImage | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB888Packed. | |
| vdtmMovingRGB888PlanarImage = lib_mvIMPACT_acquire.vdtmMovingRGB888PlanarImage | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB888Planar. | |
| vdtmMovingRGBx888PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGBx888PackedImage | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGBx888Packed. | |
| vdtmMovingRGBx888PlanarImage = lib_mvIMPACT_acquire.vdtmMovingRGBx888PlanarImage | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGBx888Planar. | |
| vdtmMovingVerticalMonoRamp = lib_mvIMPACT_acquire.vdtmMovingVerticalMonoRamp | |
| Will generate a moving vertical mono ramp. | |
| vdtmMovingYUV411_UYYVYY_PackedRamp = lib_mvIMPACT_acquire.vdtmMovingYUV411_UYYVYY_PackedRamp | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV411_UYYVYY_Packed. | |
| vdtmMovingYUV422_UYVYPackedRamp = lib_mvIMPACT_acquire.vdtmMovingYUV422_UYVYPackedRamp | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV422_UYVYPacked or mvIMPACT.acquire.ibpfYUV422_UYVY_10Packed depending on the value of the 'ChannelBitDepth' property. | |
| vdtmMovingYUV422PackedRamp = lib_mvIMPACT_acquire.vdtmMovingYUV422PackedRamp | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV422Packed or mvIMPACT.acquire.ibpfYUV422_10Packed depending on the value of the 'ChannelBitDepth' property. | |
| vdtmMovingYUV422PlanarRamp = lib_mvIMPACT_acquire.vdtmMovingYUV422PlanarRamp | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV422Planar. | |
| vdtmMovingYUV444_UYVPackedRamp = lib_mvIMPACT_acquire.vdtmMovingYUV444_UYVPackedRamp | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV444_UYVPacked or mvIMPACT.acquire.ibpfYUV444_UYV_10Packed depending on the value of the 'ChannelBitDepth' property. | |
| vdtmMovingYUV444PackedRamp = lib_mvIMPACT_acquire.vdtmMovingYUV444PackedRamp | |
| Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV444Packed or mvIMPACT.acquire.ibpfYUV444_10Packed depending on the value of the 'ChannelBitDepth' property. | |
| vdtmVerticalMonoRamp = lib_mvIMPACT_acquire.vdtmVerticalMonoRamp | |
| Will generate a vertical mono ramp. | |
| vsCCIR = lib_mvIMPACT_acquire.vsCCIR | |
| CCIR video signal: Grey, 50 fields per second, 625 lines. | |
| vsNTSCM = lib_mvIMPACT_acquire.vsNTSCM | |
| NTSC video signal: Color, 60 fields per second, 525 lines. | |
| vsPALBGH = lib_mvIMPACT_acquire.vsPALBGH | |
| PAL video signal: Color, 50 fields per second, 625 lines. | |
| vsRS170 = lib_mvIMPACT_acquire.vsRS170 | |
| RS 170 video signal: Grey, 60 fields per second, 525 lines. | |
| vsSDI1080i = lib_mvIMPACT_acquire.vsSDI1080i | |
| SDI video signal: Different frame rates, 1080 lines, interlaced. | |
| vsSDI1080p = lib_mvIMPACT_acquire.vsSDI1080p | |
| SDI video signal: Different frame rates, 1080 lines, progressive. | |
| vsSDI480i = lib_mvIMPACT_acquire.vsSDI480i | |
| SDI video signal: 60 fields per second, 480 lines, interlaced. | |
| vsSDI576i = lib_mvIMPACT_acquire.vsSDI576i | |
| SDI video signal: 50 fields per second, 576 lines, interlaced. | |
| vsSDI720p = lib_mvIMPACT_acquire.vsSDI720p | |
| SDI video signal: Different frame rates, 720 lines, progressive. | |
| vtFloat = lib_mvIMPACT_acquire.vtFloat | |
| Defines a property for float types. | |
| vtInt = lib_mvIMPACT_acquire.vtInt | |
| Defines a property for 32 bit integer types. | |
| vtInt64 = lib_mvIMPACT_acquire.vtInt64 | |
| Defines a property for 64 bit integer types. | |
| vtPtr = lib_mvIMPACT_acquire.vtPtr | |
| Defines a property for pointer types. | |
| vtString = lib_mvIMPACT_acquire.vtString | |
| Defines a property for strings. | |
| wbcmContinuous = lib_mvIMPACT_acquire.wbcmContinuous | |
| Do a continuous white balance calibration. | |
| wbcmNextFrame = lib_mvIMPACT_acquire.wbcmNextFrame | |
| Use the next image to perform the white balance calibration. | |
| wbcmOff = lib_mvIMPACT_acquire.wbcmOff | |
| Do not perform calibration, current values will be used. | |
| wbpBlueSky = lib_mvIMPACT_acquire.wbpBlueSky | |
| A set of constant parameters optimised for scenes illuminated by day light and perfect weather. | |
| wbpDayLight = lib_mvIMPACT_acquire.wbpDayLight | |
| A set of constant parameters optimised for scenes illuminated by day light. | |
| wbpFluorescent = lib_mvIMPACT_acquire.wbpFluorescent | |
| A set of constant parameters optimised for scenes illuminated by fluorescent light sources. | |
| wbpHalogen = lib_mvIMPACT_acquire.wbpHalogen | |
| A set of constant parameters optimised for scenes illuminated by halogen light sources. | |
| wbpPhotoFlash = lib_mvIMPACT_acquire.wbpPhotoFlash | |
| A set of constant parameters optimised for scenes illuminated by photo flash light sources. | |
| wbpTungsten = lib_mvIMPACT_acquire.wbpTungsten | |
| A set of constant parameters optimised for scenes illuminated by tungsten light sources. | |
| wbpUser1 = lib_mvIMPACT_acquire.wbpUser1 | |
| A parameter set which can be modified by the user. | |
| wbpUser2 = lib_mvIMPACT_acquire.wbpUser2 | |
| A parameter set which can be modified by the user. | |
| wbpUser3 = lib_mvIMPACT_acquire.wbpUser3 | |
| A parameter set which can be modified by the user. | |
| wbpUser4 = lib_mvIMPACT_acquire.wbpUser4 | |
| A parameter set which can be modified by the user. | |
Function Documentation
◆ _swig_add_metaclass()
|
protected |
Class decorator for adding a metaclass to a SWIG wrapped class - a slimmed down version of six.add_metaclass
◆ _swig_repr()
|
protected |
◆ _swig_setattr_nondynamic_class_variable()
|
protected |
◆ _swig_setattr_nondynamic_instance_variable()
|
protected |
Variable Documentation
◆ acmDeviceSpecific
| acmDeviceSpecific = lib_mvIMPACT_acquire.acmDeviceSpecific |
A device specific auto control mode.
mvBlueFOX specific: For mvBlueFOX devices of type 202b and 202d the operation in device specific AEC/AGC mode is limited in (non continuous)triggered-modes. AEC/AGC only works while the trigger signal is active. As these sensor types only support the trigger modes mvIMPACT.acquire.ctmOnHighLevel and mvIMPACT.acquire.ctmOnLowLevel 'active' means that the required signal level for that mode(either high or low) is present.
When this signal level is no longer present AEC/AGC will stop working and gain and exposure will be set to a static value. This is due to a limitation of the sensor chip. Effectively this means that for single frame triggering requiring short active pulses AEC/AGC is not possible.
◆ acmStandard
| acmStandard = lib_mvIMPACT_acquire.acmStandard |
The standard auto control mode.
◆ acsFast
| acsFast = lib_mvIMPACT_acquire.acsFast |
The controller will converge fast to the desired value.
◆ acsMedium
| acsMedium = lib_mvIMPACT_acquire.acsMedium |
The controller will converge to the desired value at medium speed.
◆ acsSlow
| acsSlow = lib_mvIMPACT_acquire.acsSlow |
The controller will converge slowly to the desired value.
◆ acsUserDefined
| acsUserDefined = lib_mvIMPACT_acquire.acsUserDefined |
In this mode the user can control the behaviour of the closed loop(control circuit).
◆ aecOff
| aecOff = lib_mvIMPACT_acquire.aecOff |
AEC is switched off.
◆ aecOn
| aecOn = lib_mvIMPACT_acquire.aecOn |
AEC is switched on.
◆ afAny
| afAny = lib_mvIMPACT_acquire.afAny |
Odd and even fields will be digitised.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ afAuto
| afAuto = lib_mvIMPACT_acquire.afAuto |
Controlled by the camera parameter.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ afEven
| afEven = lib_mvIMPACT_acquire.afEven |
Only even fields will be digitised.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ afOdd
| afOdd = lib_mvIMPACT_acquire.afOdd |
Only odd fields will be digitised.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ agcOff
| agcOff = lib_mvIMPACT_acquire.agcOff |
AGC is switched off.
◆ agcOn
| agcOn = lib_mvIMPACT_acquire.agcOn |
AGC is switched on.
◆ amCentered
| amCentered = lib_mvIMPACT_acquire.amCentered |
Use a small centered window for image processing.
In this mode, a device and processing function dependent window in the middle of the AOI captured from the device will be used for the processing function.
- Since
- 2.37.0
Example:
- Assume a device that can deliver 1280*960 pixels.
Now in the centered AOI mode a processing function will use a window smaller than the AOI in the middle of the image.
The starting point can be calculated by the formula:
The used AOI is just width / 2 * height / 2 thus takes up the center quarter of the selected AOI.
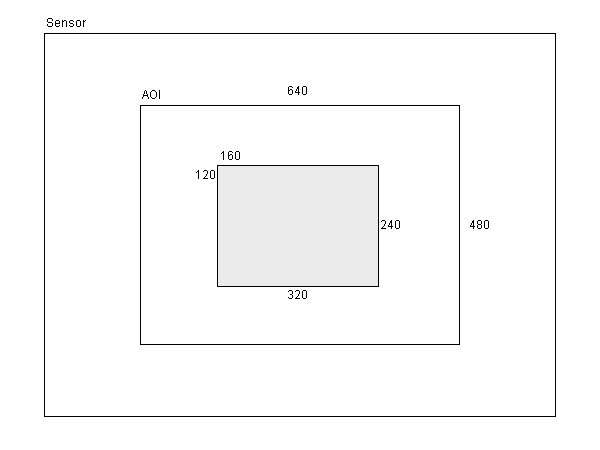
In case of an AOI defined by the user, the central AOI of the delivered image is used.
- Deprecated
- Up to version 2.36.0 the AOI had just a size of 50*50 pixels. The behavior was the following:
- Assume a device that can deliver 640*480 pixels.
- The user selects to capture an rectangular AOI starting at 100/100 with a width of 200*200 Now in the centered AOI mode a processing function will use a window smaller than the AOI in the middle of the user defined AOI. This e.g. could be a rectangle starting at 150/150 with a width of 100*100.
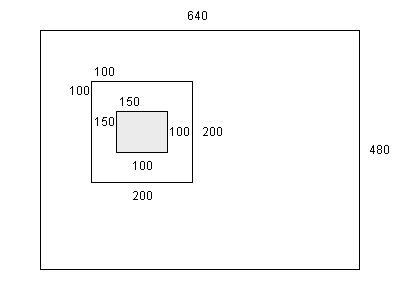
◆ amContinuous
| amContinuous = lib_mvIMPACT_acquire.amContinuous |
Continuous mode.
This is the recommended mode when image data shall either be transferred constantly or when working with an externally triggered setup.
◆ amFull
| amFull = lib_mvIMPACT_acquire.amFull |
Use the complete image for image processing.
◆ amMultiFrame
| amMultiFrame = lib_mvIMPACT_acquire.amMultiFrame |
In this mode AcquisitionFrameCount images will transferred by the device.
When AcquisitionFrameCount have been sent by the device, it will automatically stop to send more data
◆ amSingleFrame
| amSingleFrame = lib_mvIMPACT_acquire.amSingleFrame |
In this mode the device always will always just send a single image when a data stream is started.
This mode can be interesting, when the devices acquisition parameters change from image to image or when a lot of devices will be operated in the same system an bandwidth resources are limited.
◆ amUseAoi
| amUseAoi = lib_mvIMPACT_acquire.amUseAoi |
Use a user defined AOI window for image processing.
◆ aocOff
| aocOff = lib_mvIMPACT_acquire.aocOff |
The automatic offset calibration is switched off.
In this mode the offset can be adjusted manually.
◆ aocOn
| aocOn = lib_mvIMPACT_acquire.aocOn |
The automatic offset calibration is switched on.
◆ assbDefault
| assbDefault = lib_mvIMPACT_acquire.assbDefault |
The default behaviour for acquisition start and stop.
Most devices will only support this mode. When this mode is selected, the device driver will try to start and stop the transfer of data from the device automatically. Internally this will happen while image requests are being processed
◆ assbUser
| assbUser = lib_mvIMPACT_acquire.assbUser |
The user can control the start and stop of the data transfer from the device.
In this mode, queuing of image request buffers and the actual streaming of data from the device is de-coupled. This can sometimes be favorable compared to the default behaviour e.g. when dealing with device drivers that do not accept new buffers while the acquisition engine is running. Also when working at very high frame rates, pre-queuing some buffer before starting the actual data transfer can help to avoid capture queue underruns and thus data loss.
◆ bcmAdaptiveEdgeSensing
| bcmAdaptiveEdgeSensing = lib_mvIMPACT_acquire.bcmAdaptiveEdgeSensing |
Adaptive edge sensing.
This mode requires more CPU time than linear interpolation, but the resulting image more closely matches the original scene. Edges will be reconstructed with higher accuracy except for noisy images. For better results in noisy images mvIMPACT.acquire.bcmLinearInterpolation is the recommended mode.
◆ bcmAdaptiveEdgeSensingPlus
| bcmAdaptiveEdgeSensingPlus = lib_mvIMPACT_acquire.bcmAdaptiveEdgeSensingPlus |
Adaptive edge sensing plus.
This mode is even more demanding CPU-wise than adaptive edge sensing, but the resulting image is sharper and has fewer artifacts. The parameters of the sharpening filter can be set by the user, to fit specific needs.
- Since
- 2.26.0
◆ bcmAdaptiveHomogeneityDirected
| bcmAdaptiveHomogeneityDirected = lib_mvIMPACT_acquire.bcmAdaptiveHomogeneityDirected |
Adaptive edge sensing plus.
This mode is most demanding CPU-wise, but the resulting image will have the best possible quality. It is based on the following algorithm: K. Hirakawa, T.W. Parks, Adaptive Homogeneity-Directed Demosaicing Algorithm, IEEE Trans. Image Processing, March, 2005.
- Since
- 2.27.0
◆ bcmAuto
| bcmAuto = lib_mvIMPACT_acquire.bcmAuto |
Auto.
This mode automatically sets the Bayer conversion algorithm according to the format property of the camera description.
◆ bcmLinearInterpolation
| bcmLinearInterpolation = lib_mvIMPACT_acquire.bcmLinearInterpolation |
Linear interpolation.
This mode is fast but especially sharp edges will appear slightly blurred in the resulting image.
◆ bcmLinearPacked
| bcmLinearPacked = lib_mvIMPACT_acquire.bcmLinearPacked |
Linear Packed.
In this mode the resulting image will have half the height of the source image. The following algorithm will be used for generating the resulting image:
This mode is mainly useful for line scan cameras as for area cameras this would modify the aspect ratio.
- Since
- 2.5.9
◆ bcmPacked
| bcmPacked = lib_mvIMPACT_acquire.bcmPacked |
Packed.
In this mode the resulting image will have half the height of the source image. The following algorithm will be used for generating the resulting image:
This mode is mainly useful for line scan cameras as for area cameras this would modify the aspect ratio.
- Since
- 2.5.9
◆ bFalse
| bFalse = lib_mvIMPACT_acquire.bFalse |
Off, false or logical low.
◆ bfdit10V
| bfdit10V = lib_mvIMPACT_acquire.bfdit10V |
This input is assumed as logic '1' when the voltage applied to the input lies above about 10 Volts.
◆ bfdit2V
| bfdit2V = lib_mvIMPACT_acquire.bfdit2V |
This input is assumed as logic '1' when the voltage applied to the input lies above about 2 Volts.
◆ bffm512B
| bffm512B = lib_mvIMPACT_acquire.bffm512B |
A long 512 Byte footer.
◆ bffm64B
| bffm64B = lib_mvIMPACT_acquire.bffm64B |
A 64 Byte footer (standard).
◆ bffmOff
| bffmOff = lib_mvIMPACT_acquire.bffmOff |
No footer.
◆ bfiscAutoControlAOI
| bfiscAutoControlAOI = lib_mvIMPACT_acquire.bfiscAutoControlAOI |
This sensor supports to define an AOI for the AGC/AEC/AOC(Auto Offset Control) features.
◆ bfiscAutoControlDelay
| bfiscAutoControlDelay = lib_mvIMPACT_acquire.bfiscAutoControlDelay |
This sensor supports to define a delay for the AGC/AEC/AOC(Auto Offset Control) features.
◆ bfiscAutoControlSpeed
| bfiscAutoControlSpeed = lib_mvIMPACT_acquire.bfiscAutoControlSpeed |
This sensor supports to define the control speed for the AGC/AEC/AOC(Auto Offset Control) features.
◆ bfiscAutoOffsetBlackLevel
| bfiscAutoOffsetBlackLevel = lib_mvIMPACT_acquire.bfiscAutoOffsetBlackLevel |
This sensor supports Auto Offset Black Level.
◆ bfiscBinning
| bfiscBinning = lib_mvIMPACT_acquire.bfiscBinning |
This sensor supports binning.
◆ bfiscExposeToFlashDelay
| bfiscExposeToFlashDelay = lib_mvIMPACT_acquire.bfiscExposeToFlashDelay |
This sensor supports Expose To Flash Delay.
◆ bfiscExposure
| bfiscExposure = lib_mvIMPACT_acquire.bfiscExposure |
The exposure time can be controlled by an application.
◆ bfiscExposureAuto
| bfiscExposureAuto = lib_mvIMPACT_acquire.bfiscExposureAuto |
This sensor can automatically control the exposure time.
◆ bfiscFlash
| bfiscFlash = lib_mvIMPACT_acquire.bfiscFlash |
This sensor can output the 'exposure active' signal(e.g.
to control a flash).
◆ bfiscFrameDelay
| bfiscFrameDelay = lib_mvIMPACT_acquire.bfiscFrameDelay |
This sensor supports frame delay.
◆ bfiscFrameRate
| bfiscFrameRate = lib_mvIMPACT_acquire.bfiscFrameRate |
This sensor supports FrameRate_Hz.
◆ bfiscGain
| bfiscGain = lib_mvIMPACT_acquire.bfiscGain |
The gain can be controlled by an application.
◆ bfiscGainAuto
| bfiscGainAuto = lib_mvIMPACT_acquire.bfiscGainAuto |
This sensor can automatically control the gain.
◆ bfiscLineDelay
| bfiscLineDelay = lib_mvIMPACT_acquire.bfiscLineDelay |
This sensor supports line delay.
◆ bfiscLineTrigger
| bfiscLineTrigger = lib_mvIMPACT_acquire.bfiscLineTrigger |
This sensor supports line triggered acquisition.
◆ bfiscNone
| bfiscNone = lib_mvIMPACT_acquire.bfiscNone |
A dummy constant to indicate, that this device does not have any capabilities defined by other constants belonging to this enumeration.
◆ bfiscOffset
| bfiscOffset = lib_mvIMPACT_acquire.bfiscOffset |
The offset can be controlled by an application.
◆ bfiscOffsetAuto
| bfiscOffsetAuto = lib_mvIMPACT_acquire.bfiscOffsetAuto |
This sensor can automatically control the offset.
◆ bfiscOverlappedExposure
| bfiscOverlappedExposure = lib_mvIMPACT_acquire.bfiscOverlappedExposure |
This sensor supports overlapped exposure.
◆ bfiscReverseX
| bfiscReverseX = lib_mvIMPACT_acquire.bfiscReverseX |
This sensor supports ReverseX.
◆ bfiscReverseY
| bfiscReverseY = lib_mvIMPACT_acquire.bfiscReverseY |
This sensor supports ReverseY.
◆ bfiscShadingCorrection
| bfiscShadingCorrection = lib_mvIMPACT_acquire.bfiscShadingCorrection |
This sensor can perform shading correction.
◆ bfiscTemperatureSensor
| bfiscTemperatureSensor = lib_mvIMPACT_acquire.bfiscTemperatureSensor |
This sensor supports a temperature sensor within the imager.
◆ bfiscTrigger
| bfiscTrigger = lib_mvIMPACT_acquire.bfiscTrigger |
This sensor supports triggered acquisition.
◆ bfoablFast
| bfoablFast = lib_mvIMPACT_acquire.bfoablFast |
Fast Setting.
◆ bfoablFastest
| bfoablFastest = lib_mvIMPACT_acquire.bfoablFastest |
Fastest Setting.
◆ bfoablMedium
| bfoablMedium = lib_mvIMPACT_acquire.bfoablMedium |
Medium Setting.
◆ bfoablSlow
| bfoablSlow = lib_mvIMPACT_acquire.bfoablSlow |
Slow Setting.
◆ bfoablSlowest
| bfoablSlowest = lib_mvIMPACT_acquire.bfoablSlowest |
Slowest Setting.
◆ bfoablVeryFast
| bfoablVeryFast = lib_mvIMPACT_acquire.bfoablVeryFast |
Very fast Setting.
◆ bfoablVerySlow
| bfoablVerySlow = lib_mvIMPACT_acquire.bfoablVerySlow |
Very slow Setting.
◆ bfstFastLineSkip
| bfstFastLineSkip = lib_mvIMPACT_acquire.bfstFastLineSkip |
Fast line skip timing.
In this mode a faster line skip timing will be used. This will result in a higher frame rate in partial scan mode, but might affect the image quality.
- Note
- This mode is not available for every mvBlueFOX camera.
◆ bfstLowSmearLineSkip
| bfstLowSmearLineSkip = lib_mvIMPACT_acquire.bfstLowSmearLineSkip |
This mode is not available for every mvBlueFOX camera.
◆ bfstStandard
| bfstStandard = lib_mvIMPACT_acquire.bfstStandard |
Standard Timing.
◆ bfts1024KB
| bfts1024KB = lib_mvIMPACT_acquire.bfts1024KB |
1024KB blocks.
◆ bfts128KB
| bfts128KB = lib_mvIMPACT_acquire.bfts128KB |
128KB blocks.
◆ bfts16KB
| bfts16KB = lib_mvIMPACT_acquire.bfts16KB |
16KB blocks.
◆ bfts2048KB
| bfts2048KB = lib_mvIMPACT_acquire.bfts2048KB |
2048KB blocks.
◆ bfts256KB
| bfts256KB = lib_mvIMPACT_acquire.bfts256KB |
256KB blocks.
◆ bfts32KB
| bfts32KB = lib_mvIMPACT_acquire.bfts32KB |
32KB blocks.
◆ bfts512KB
| bfts512KB = lib_mvIMPACT_acquire.bfts512KB |
512KB blocks.
◆ bfts64KB
| bfts64KB = lib_mvIMPACT_acquire.bfts64KB |
64KB blocks.
◆ bmpBG
| bmpBG = lib_mvIMPACT_acquire.bmpBG |
The buffer or image starts with a green-blue line starting with a blue pixel.
◆ bmpGB
| bmpGB = lib_mvIMPACT_acquire.bmpGB |
The buffer or image starts with a green-blue line starting with a green pixel.
◆ bmpGR
| bmpGR = lib_mvIMPACT_acquire.bmpGR |
The buffer or image starts with a green-red line starting with a green pixel.
◆ bmpRG
| bmpRG = lib_mvIMPACT_acquire.bmpRG |
The buffer or image starts with a green-red line starting with a red pixel.
◆ bmpUndefined
| bmpUndefined = lib_mvIMPACT_acquire.bmpUndefined |
It is not known whether the buffer or image contains raw Bayer data or the buffer or image does NOT contain raw Bayer data.
◆ bpdt2DImage
| bpdt2DImage = lib_mvIMPACT_acquire.bpdt2DImage |
Color or monochrome (2D) image (GenTL).
This part carries all the pixel data of given image (even if the image is represented by a single-plane pixel format).
◆ bpdt2DPlaneBiplanar
| bpdt2DPlaneBiplanar = lib_mvIMPACT_acquire.bpdt2DPlaneBiplanar |
Single color plane of a planar (2D) image (GenTL).
The data should be linked with the other color planes to get the complete image. The complete image consists of 2 planes. The planes of a given planar image must be placed as consecutive parts within the buffer.
◆ bpdt2DPlaneQuadplanar
| bpdt2DPlaneQuadplanar = lib_mvIMPACT_acquire.bpdt2DPlaneQuadplanar |
Single color plane of a planar (2D) image (GenTL).
The data should be linked with the other color planes to get the complete image. The complete image consists of 4 planes. The planes of a given planar image must be placed as consecutive parts within the buffer.
◆ bpdt2DPlaneTriplanar
| bpdt2DPlaneTriplanar = lib_mvIMPACT_acquire.bpdt2DPlaneTriplanar |
Single color plane of a planar (2D) image (GenTL).
The data should be linked with the other color planes to get the complete image. The complete image consists of 3 planes. The planes of a given planar image must be placed as consecutive parts within the buffer.
◆ bpdt3DImage
| bpdt3DImage = lib_mvIMPACT_acquire.bpdt3DImage |
3D image (pixel coordinates) (GenTL).
This part carries all the pixel data of given image (even if the image is represented by a single-plane pixel format, for example when transferring the depth map only).
◆ bpdt3DPlaneBiplanar
| bpdt3DPlaneBiplanar = lib_mvIMPACT_acquire.bpdt3DPlaneBiplanar |
Single color plane of a planar (3D) image (GenTL).
The data should be linked with the other color planes to get the complete image. The complete image consists of 2 planes. The planes of a given planar image must be placed as consecutive parts within the buffer.
◆ bpdt3DPlaneQuadplanar
| bpdt3DPlaneQuadplanar = lib_mvIMPACT_acquire.bpdt3DPlaneQuadplanar |
Single color plane of a planar (3D) image (GenTL).
The data should be linked with the other color planes to get the complete image. The complete image consists of 4 planes. The planes of a given planar image must be placed as consecutive parts within the buffer.
◆ bpdt3DPlaneTriplanar
| bpdt3DPlaneTriplanar = lib_mvIMPACT_acquire.bpdt3DPlaneTriplanar |
Single color plane of a planar (3D) image (GenTL).
The data should be linked with the other color planes to get the complete image. The complete image consists of 3 planes. The planes of a given planar image must be placed as consecutive parts within the buffer.
◆ bpdtConfidenceMap
| bpdtConfidenceMap = lib_mvIMPACT_acquire.bpdtConfidenceMap |
Confidence of the individual pixel values (GenTL).
Expresses the level of validity of given pixel values. Confidence map is always used together with one or more additional image-based parts matching 1:1 dimension-wise. Each value in the confidence map expresses level of validity of the image pixel at matching position.
◆ bpdtGDC_2DImage
| bpdtGDC_2DImage = lib_mvIMPACT_acquire.bpdtGDC_2DImage |
Color or monochrome (2D) image (GenDC).
This part carries all the pixel data of given image (even if the image is represented by a single-plane pixel format).
◆ bpdtGDC_GenICamChunkData
| bpdtGDC_GenICamChunkData = lib_mvIMPACT_acquire.bpdtGDC_GenICamChunkData |
Chunk data (GenDC).
The data in this buffer part contains chunk data which can be decoded according the standard the data originated from.
- Since
- 2.50.0
◆ bpdtGDC_GenICamXML
| bpdtGDC_GenICamXML = lib_mvIMPACT_acquire.bpdtGDC_GenICamXML |
GenICam XML data (GenDC).
The data in this buffer part contains a GenICam XML file.
- Since
- 2.50.0
◆ bpdtGDC_H264
| bpdtGDC_H264 = lib_mvIMPACT_acquire.bpdtGDC_H264 |
A H.264 buffer (GenDC).
The data in this buffer part contains H.264 frame.
- Since
- 2.50.0
◆ bpdtGDC_JPEG
| bpdtGDC_JPEG = lib_mvIMPACT_acquire.bpdtGDC_JPEG |
JPEG image data (GenDC).
- Since
- 2.50.0
◆ bpdtGDC_JPEG2000
| bpdtGDC_JPEG2000 = lib_mvIMPACT_acquire.bpdtGDC_JPEG2000 |
JPEG 2000 image data (GenDC).
- Since
- 2.50.0
◆ bpdtGenICamChunkData
| bpdtGenICamChunkData = lib_mvIMPACT_acquire.bpdtGenICamChunkData |
Chunk data (GenTL).
The data in this buffer part contains chunk data which can be decoded according the standard the data originated from.
- Since
- 2.50.0
◆ bpdtJPEG
| bpdtJPEG = lib_mvIMPACT_acquire.bpdtJPEG |
JPEG image data (GenTL).
◆ bpdtJPEG2000
| bpdtJPEG2000 = lib_mvIMPACT_acquire.bpdtJPEG2000 |
JPEG 2000 image data (GenTL).
◆ bpdtUnknown
| bpdtUnknown = lib_mvIMPACT_acquire.bpdtUnknown |
The framework is not aware of the data type of the data in the provided buffer part.
From the application perspective this can be handled as raw data.
◆ bTrue
| bTrue = lib_mvIMPACT_acquire.bTrue |
On, true or logical high.
◆ bwbrErrorTooBright
| bwbrErrorTooBright = lib_mvIMPACT_acquire.bwbrErrorTooBright |
The previous white balance calibration failed because the reference image used for the calibration was too bright.
◆ bwbrErrorTooDark
| bwbrErrorTooDark = lib_mvIMPACT_acquire.bwbrErrorTooDark |
The previous white balance calibration failed because the reference image used for the calibration was too dark.
◆ bwbrErrorUnknown
| bwbrErrorUnknown = lib_mvIMPACT_acquire.bwbrErrorUnknown |
An unknown error occurred during the white balance calibration for the selected setting.
◆ bwbrOK
| bwbrOK = lib_mvIMPACT_acquire.bwbrOK |
The white balance calibration has been performed successfully for the selected setting.
◆ bwbrUnknown
| bwbrUnknown = lib_mvIMPACT_acquire.bwbrUnknown |
No white balance calibration has been performed since start up.
◆ camFull
| camFull = lib_mvIMPACT_acquire.camFull |
Use the complete AOI window defined by the hardware or input data (sensor, camera).
◆ camUser
| camUser = lib_mvIMPACT_acquire.camUser |
Use a user defined AOI window.
◆ cbmBinning3H
| cbmBinning3H = lib_mvIMPACT_acquire.cbmBinning3H |
Horizontal Binning (combines 4 adjacent columns).
◆ cbmBinning3H3V
| cbmBinning3H3V = lib_mvIMPACT_acquire.cbmBinning3H3V |
Combines mvIMPACT.acquire.cbmBinning3H and mvIMPACT.acquire.cbmBinning3V.
◆ cbmBinning3H3VAvg
| cbmBinning3H3VAvg = lib_mvIMPACT_acquire.cbmBinning3H3VAvg |
Combines mvIMPACT.acquire.cbmBinning3H and mvIMPACT.acquire.cbmBinning3V.
◆ cbmBinning3HAvg
| cbmBinning3HAvg = lib_mvIMPACT_acquire.cbmBinning3HAvg |
Horizontal Binning with average (combines 4 adjacent columns and averages the result).
◆ cbmBinning3V
| cbmBinning3V = lib_mvIMPACT_acquire.cbmBinning3V |
Vertical Binning (combines 4 adjacent rows).
◆ cbmBinning3VAvg
| cbmBinning3VAvg = lib_mvIMPACT_acquire.cbmBinning3VAvg |
Vertical Binning with average (combines 4 adjacent rows and averages the result).
◆ cbmBinningH
| cbmBinningH = lib_mvIMPACT_acquire.cbmBinningH |
Horizontal Binning (combines 2 adjacent columns).
◆ cbmBinningHAvg
| cbmBinningHAvg = lib_mvIMPACT_acquire.cbmBinningHAvg |
Horizontal Binning with average (combines 2 adjacent columns and averages the result).
◆ cbmBinningHV
| cbmBinningHV = lib_mvIMPACT_acquire.cbmBinningHV |
Combines mvIMPACT.acquire.cbmBinningH and mvIMPACT.acquire.cbmBinningV.
◆ cbmBinningHVAvg
| cbmBinningHVAvg = lib_mvIMPACT_acquire.cbmBinningHVAvg |
Combines mvIMPACT.acquire.cbmBinningH and mvIMPACT.acquire.cbmBinningV.
◆ cbmBinningV
| cbmBinningV = lib_mvIMPACT_acquire.cbmBinningV |
Vertical Binning (combines 2 adjacent rows).
◆ cbmBinningVAvg
| cbmBinningVAvg = lib_mvIMPACT_acquire.cbmBinningVAvg |
Vertical Binning with average (combines 2 adjacent rows and averages the result).
◆ cbmDropping3H
| cbmDropping3H = lib_mvIMPACT_acquire.cbmDropping3H |
Horizontal Dropping (drops 3 adjacent columns out of 4).
◆ cbmDropping3H3V
| cbmDropping3H3V = lib_mvIMPACT_acquire.cbmDropping3H3V |
Combines mvIMPACT.acquire.cbmDropping3H and mvIMPACT.acquire.cbmDropping3V.
◆ cbmDropping3V
| cbmDropping3V = lib_mvIMPACT_acquire.cbmDropping3V |
Vertical Binning (drops 3 adjacent rows out of 4).
◆ cbmDroppingH
| cbmDroppingH = lib_mvIMPACT_acquire.cbmDroppingH |
Horizontal Dropping (drops every second column).
◆ cbmDroppingHV
| cbmDroppingHV = lib_mvIMPACT_acquire.cbmDroppingHV |
Combines mvIMPACT.acquire.cbmDroppingH and mvIMPACT.acquire.cbmDroppingV.
◆ cbmDroppingV
| cbmDroppingV = lib_mvIMPACT_acquire.cbmDroppingV |
Vertical Dropping (drops every second row).
◆ cbmOff
| cbmOff = lib_mvIMPACT_acquire.cbmOff |
No Binning.
◆ cdfBayer
| cdfBayer = lib_mvIMPACT_acquire.cdfBayer |
This is a Bayer format.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cdfBayerPacked
| cdfBayerPacked = lib_mvIMPACT_acquire.cdfBayerPacked |
This is a Bayer Packed format.
For each object line there is a red and a blue raw line to calculate the resulting color line.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cdfMono
| cdfMono = lib_mvIMPACT_acquire.cdfMono |
This is a mono data format.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cdfRGB
| cdfRGB = lib_mvIMPACT_acquire.cdfRGB |
This is a RGB format.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cdfUnknown
| cdfUnknown = lib_mvIMPACT_acquire.cdfUnknown |
This is an unknown type.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cdfYUV
| cdfYUV = lib_mvIMPACT_acquire.cdfYUV |
This is a YUV format.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cemNoShutter
| cemNoShutter = lib_mvIMPACT_acquire.cemNoShutter |
'No shutter' mode, switch off exposure control.
This only affects the behaviour of the acquisition in mvIMPACT.acquire.TCameraTriggerMode is set to mvIMPACT.acquire.ctmContinuous. In this case the shutter of the camera is never closed. Thus the exposure time in this mode is equal to the reciprocal value of the current frame rate.
◆ cemOverlapped
| cemOverlapped = lib_mvIMPACT_acquire.cemOverlapped |
Overlapped mode, expose during image readout.
This only affects the behaviour of the acquisition in mvIMPACT.acquire.TCameraTriggerMode is set to mvIMPACT.acquire.ctmContinuous.
In this mode the flash output should NOT be used. In any case the flash output will NOT work like in mvIMPACT.acquire.cemStandard but only a short pulse will be sent to the output.
◆ cemStandard
| cemStandard = lib_mvIMPACT_acquire.cemStandard |
Standard sequential mode.
In this mode the sensor first is exposed and then afterwards the image readout is performed.
◆ ceseFallingEdge
| ceseFallingEdge = lib_mvIMPACT_acquire.ceseFallingEdge |
◆ ceseNo
| ceseNo = lib_mvIMPACT_acquire.ceseNo |
◆ ceseRisingEdge
| ceseRisingEdge = lib_mvIMPACT_acquire.ceseRisingEdge |
◆ cesoAuto
| cesoAuto = lib_mvIMPACT_acquire.cesoAuto |
The sync signal is expected on the selected video channel.
If RGB is used the sync signal is expected on the 'green' channel ( SyncOnGreen )
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cesoBlue
| cesoBlue = lib_mvIMPACT_acquire.cesoBlue |
The sync signal is expected on the third ('blue') video channel ( mvTITAN-RGB only ).
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cesoExtern
| cesoExtern = lib_mvIMPACT_acquire.cesoExtern |
The sync signal is expected on the fourth ('extern') video channel ( mvTITAN-RGB only ).
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cesoGreen
| cesoGreen = lib_mvIMPACT_acquire.cesoGreen |
The sync signal is expected on the second ('green') video channel ( mvTITAN-RGB only ).
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cesoRed
| cesoRed = lib_mvIMPACT_acquire.cesoRed |
The sync signal is expected on the first ('red') video channel ( mvTITAN-RGB only ).
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cfAllowValueCombinations
| cfAllowValueCombinations = lib_mvIMPACT_acquire.cfAllowValueCombinations |
Allows combinations of translation dictionary entry as valid values.
If this flag is set for a property that defines a translation dictionary not only values, which are registered in the translation dictionary are allowed values for this property, but also values logical OR-ed together with values from the translation dictionary (these obviously can't be set as strings).
A property defines two entries ("one", 1) and ("two", 2) then 1 | 2 = 3 will be a valid value as well, but "three" obviously won't.
In a GUI application a property specifying this flag should be displayed as a set of check-box controls (one for each dictionary entry) or something similar.
- Note
- If this flag is specified for a component, which is not a property, it will have no effect on the behaviour of the component. Only integer properties can use this feature
◆ cfAlwaysForceClone
| cfAlwaysForceClone = lib_mvIMPACT_acquire.cfAlwaysForceClone |
If set this component is always cloned completely.
This results in the component being completely independent from its parent no matter whether it has been built while deriving or cloning a list and thus the components within this list and its sub-lists.
This will change the behaviour to that effect that changing the parent component will no longer affect the 'derived' component. So different default values, constants and translation dictionaries for properties within an inheritance hierarchy can be defined.
- Note
- This feature is currently only supported for components of type mvIMPACT.acquire.ctPropInt, mvIMPACT.acquire.ctPropInt64 and mvIMPACT.acquire.ctPropFloat.
◆ cfAlwaysForceUpdate
| cfAlwaysForceUpdate = lib_mvIMPACT_acquire.cfAlwaysForceUpdate |
This feature will ALWAYS execute internal update callbacks and will treat each write attempt to this feature as a value different from the current one.
- Since
- 2.0.11
◆ cfContainsBinaryData
| cfContainsBinaryData = lib_mvIMPACT_acquire.cfContainsBinaryData |
Specifies a property, which contains binary data.
This flag is used to specify a property that contains data in binary format
◆ cfDisallowSerialize
| cfDisallowSerialize = lib_mvIMPACT_acquire.cfDisallowSerialize |
If set this component or derived components can't be stored as external data.
◆ cfFixedSize
| cfFixedSize = lib_mvIMPACT_acquire.cfFixedSize |
This components element count can be modified.
If this flag is set this components element count can't be modified. For a list this would mean, that the number of elements stored in this list can't be modified. For a property this means, that the number of values stored in the property can't be modified.
◆ cfInvisible
| cfInvisible = lib_mvIMPACT_acquire.cfInvisible |
The component is shadowed by other settings currently if set.
This flag is used to specify that this component currently has no effect on the behaviour of the system. This flag is just meant as a hint for the user. The property module itself does NOT use this flag for anything.
◆ cfmDigout0
| cfmDigout0 = lib_mvIMPACT_acquire.cfmDigout0 |
Output 0 will be active during the exposure period.
◆ cfmDigout1
| cfmDigout1 = lib_mvIMPACT_acquire.cfmDigout1 |
Output 1 will be active during the exposure period.
◆ cfmOff
| cfmOff = lib_mvIMPACT_acquire.cfmOff |
Do not use the cameras flash output.
◆ cfNotAvailable
| cfNotAvailable = lib_mvIMPACT_acquire.cfNotAvailable |
If set, this component is currently not available due to the setting of another feature.
In this case this feature can't be written to nor can it be read.
◆ cfNotImplemented
| cfNotImplemented = lib_mvIMPACT_acquire.cfNotImplemented |
If set, this feature has been defined, but so far has not been implemented.
◆ cfReadAccess
| cfReadAccess = lib_mvIMPACT_acquire.cfReadAccess |
This component can be accessed for reading.
If this flag is set this component can be accessed for reading. This involves reading a property's data, reading a component list's elements reading the size of a component list and so on.
◆ cfRWAccess
| cfRWAccess = lib_mvIMPACT_acquire.cfRWAccess |
This component can be accessed for both reading and writing.
This just combines mvIMPACT.acquire.cfReadAccess and mvIMPACT.acquire.cfWriteAccess
◆ cfShouldBeDisplayedAsEnumeration
| cfShouldBeDisplayedAsEnumeration = lib_mvIMPACT_acquire.cfShouldBeDisplayedAsEnumeration |
Informs a displaying GUI that this component should be displayed as an enumeration(e.g.
with a combo box).
This flag e.g. can be set for a property to inform a displaying GUI, that this property is best displayed as a combo box or something similar. This flag is just meant as a hint for the user. The property module itself does NOT use this flag for anything.
- Since
- 1.12.57
◆ cfShouldBeDisplayedAsList
| cfShouldBeDisplayedAsList = lib_mvIMPACT_acquire.cfShouldBeDisplayedAsList |
Informs a displaying GUI that this component should be displayed as a list.
This flag e.g. can be set for an array property to inform a displaying GUI, that this property is best displayed as a list with a entry for each element. This flag is just meant as a hint for the user. The property module itself does NOT use this flag for anything.
◆ cftRollingShutterFlash
| cftRollingShutterFlash = lib_mvIMPACT_acquire.cftRollingShutterFlash |
Flash signal is only on during the time all lines of a rolling shutter sensor are exposed.
This time is always smaller or equal to the time defined by mvIMPACT.acquire.cftStandard.
◆ cftStandard
| cftStandard = lib_mvIMPACT_acquire.cftStandard |
Flash signal is on while the shutter is open on a frame shutter sensor or during the complete exposure period of a rolling shutter sensor.
◆ cftVSync
| cftVSync = lib_mvIMPACT_acquire.cftVSync |
Flash signal is derived from the sensors internal VSync (Frame-sync.
signal).
The specific timing of this signal is hardware dependent. The signal can be used to synchronize a master camera with a flash or another camera with a rolling shutter sensor.
◆ cfUndefined
| cfUndefined = lib_mvIMPACT_acquire.cfUndefined |
This is used to define an inconsistent/invalid flag.
This e.g. can be used as a return value for a function, that could not calculate a valid flag mask.
◆ cfWriteAccess
| cfWriteAccess = lib_mvIMPACT_acquire.cfWriteAccess |
This component can be accessed for writing.
If this flag is set this component can be accessed for writing or modifying its data. This involves writing values to a property, adding components to a list and so on.
◆ cHDRmFixed0
| cHDRmFixed0 = lib_mvIMPACT_acquire.cHDRmFixed0 |
Fixed HDR parameter set 0.
◆ cHDRmFixed1
| cHDRmFixed1 = lib_mvIMPACT_acquire.cHDRmFixed1 |
Fixed HDR parameter set 1.
◆ cHDRmFixed2
| cHDRmFixed2 = lib_mvIMPACT_acquire.cHDRmFixed2 |
Fixed HDR parameter set 2.
◆ cHDRmFixed3
| cHDRmFixed3 = lib_mvIMPACT_acquire.cHDRmFixed3 |
Fixed HDR parameter set 3.
◆ cHDRmFixed4
| cHDRmFixed4 = lib_mvIMPACT_acquire.cHDRmFixed4 |
Fixed HDR parameter set 4.
◆ cHDRmFixed5
| cHDRmFixed5 = lib_mvIMPACT_acquire.cHDRmFixed5 |
Fixed HDR parameter set 5.
◆ cHDRmFixed6
| cHDRmFixed6 = lib_mvIMPACT_acquire.cHDRmFixed6 |
Fixed HDR parameter set 6.
◆ cHDRmUser
| cHDRmUser = lib_mvIMPACT_acquire.cHDRmUser |
User specific HDR mode, controlled by additional parameters.
◆ citInterlaced
| citInterlaced = lib_mvIMPACT_acquire.citInterlaced |
The video signal is transferred interlaced.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
Here the camera transmits the video signal in two consecutive frames that form a complete image. The first frame contains all the even lines (0, 2, 4, ... ) of the image, while the second frame contains all odd lines of the image.
◆ citInvertedInterlaced
| citInvertedInterlaced = lib_mvIMPACT_acquire.citInvertedInterlaced |
The video signal is transferred interlaced with the two frames in reversed order.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
Here the camera transmits the video signal in two consecutive frames that form a complete image. The first frame contains all the odd lines (0, 2, 4, ... ) of the image, while the second frame contains all even lines of the image.
◆ citNone
| citNone = lib_mvIMPACT_acquire.citNone |
The video signal is transmitted non interlaced, meaning that a complete image is transferred without interruption.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cldvmActive
| cldvmActive = lib_mvIMPACT_acquire.cldvmActive |
The camera transmits a data valid (DVAL) signal, that should be evaluated by the frame grabber.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cldvmInactive
| cldvmInactive = lib_mvIMPACT_acquire.cldvmInactive |
The camera does not transmit a data valid (DVAL) signal, that should be evaluated by the frame grabber.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cltxg1X
| cltxg1X = lib_mvIMPACT_acquire.cltxg1X |
One tap.
Pixels are transmitted from left to right.
◆ cltxg1X2
| cltxg1X2 = lib_mvIMPACT_acquire.cltxg1X2 |
Two taps.
Pixels are transmitted from left to right.
Adjacent pixels are transmitted with one pixel clock.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 |
| 1 | 1 | 2 |
| 2 | 3 | 4 |
| ... | ... | ... |
| W/2 | W-1 | W |
◆ cltxg1X3
| cltxg1X3 = lib_mvIMPACT_acquire.cltxg1X3 |
Three taps.
Pixels are transmitted from left to right.
Adjacent pixels are transmitted with one pixel clock.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 |
| 1 | 1 | 2 | 3 |
| 2 | 4 | 5 | 6 |
| ... | ... | ... | ... |
| W/3 | W-2 | W-1 | W |
◆ cltxg1X4
| cltxg1X4 = lib_mvIMPACT_acquire.cltxg1X4 |
Four taps.
Pixels are transmitted from left to right.
Adjacent pixels are transmitted with one pixel clock.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 | Pixel from Tap 4 |
| 1 | 1 | 2 | 3 | 4 |
| 2 | 5 | 6 | 7 | 8 |
| ... | ... | ... | ... | ... |
| W/4 | W-3 | W-2 | W-1 | W |
◆ cltxg1X8
| cltxg1X8 = lib_mvIMPACT_acquire.cltxg1X8 |
Eight taps.
Pixels are transmitted from left to right.
Adjacent pixels are transmitted with one pixel clock.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 | Pixel from Tap 4 | Pixel from Tap 5 | Pixel from Tap 6 | Pixel from Tap 7 | Pixel from Tap 8 |
| 1 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 2 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... |
| W/8 | W-7 | W-6 | W-5 | W-4 | W-3 | W-2 | W-1 | W |
◆ cltxg2X
| cltxg2X = lib_mvIMPACT_acquire.cltxg2X |
Two taps.
Sorting of data needed.
The first tap will transmit the first half of each line, the second tap will transmit the second half of each line. Both taps will transmit pixels from left to right.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 |
| 1 | 1 | W/2+1 |
| 2 | 2 | W/2+2 |
| ... | ... | ... |
| W/2 | W/2 | W |
◆ cltxg2X2
| cltxg2X2 = lib_mvIMPACT_acquire.cltxg2X2 |
Four taps.
The first two taps will transmit the first half of the line, while the second two taps will transmit the second half of the line. Sorting of data needed.
Both tap pairs will transmit their data from left to right.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 | Pixel from Tap 4 |
| 1 | 1 | 2 | W/2+1 | W/2+2 |
| 2 | 3 | 4 | W/2+3 | W/2+4 |
| ... | ... | ... | ... | ... |
| W/4 | W/2-1 | W/2 | W-1 | W |
◆ cltxg2X2E
| cltxg2X2E = lib_mvIMPACT_acquire.cltxg2X2E |
Four taps.
The first two taps will transmit the first half of the line, while the second two taps will transmit the second half of the line. Sorting of data needed.
The first tap pair will transmit the data from left to right, while the second pair of taps will transfer the data from right to left.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 | Pixel from Tap 4 |
| 1 | 1 | 2 | W-1 | W |
| 2 | 3 | 4 | W-3 | W-2 |
| ... | ... | ... | ... | ... |
| W/4 | W/2-1 | W/2 | W/2+1 | W/2+2 |
◆ cltxg2X2M
| cltxg2X2M = lib_mvIMPACT_acquire.cltxg2X2M |
Four taps.
The first two taps will transmit the first half of the line, while the second two taps will transmit the second half of the line. Sorting of data needed.
The first tap pair will transmit the data from right to left, while the second pair of taps will transfer the data from left to right.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 | Pixel from Tap 4 |
| 1 | W/2-1 | W/2 | W/2+1 | W/2+2 |
| 2 | W/2-3 | W/2-2 | W/2+3 | W/2+4 |
| ... | ... | ... | ... | ... |
| W/4 | 1 | 2 | W-1 | W |
◆ cltxg2XE
| cltxg2XE = lib_mvIMPACT_acquire.cltxg2XE |
Two taps.
Sorting of data needed.
The first tap will transmit the first half of each line from left to right, the second tap will transmit the second half of the line from right to left.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 |
| 1 | 1 | W |
| 2 | 2 | W-1 |
| ... | ... | ... |
| W/2 | W/2 | W/2+1 |
◆ cltxg2XM
| cltxg2XM = lib_mvIMPACT_acquire.cltxg2XM |
Two taps.
Sorting of data needed.
The first tap will transmit the first half of each line from right to left, the second tap will transmit the second half of the line from left to right.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 |
| 1 | W/2 | W/2+1 |
| 2 | W/2-1 | W/2+2 |
| ... | ... | ... |
| W/2 | 1 | W |
◆ cltxg3X
| cltxg3X = lib_mvIMPACT_acquire.cltxg3X |
Three taps.
Each tap will transmit one third of each line, pixel are transmitted from left to right. Sorting of data needed.
The first tap will transmit the first third of each line, the second tap will transmit the second third and the third tap will transmit the last third of each line from left to right.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 |
| 1 | 1 | W/3+1 | 2W/3+1 |
| 2 | 2 | W/3+2 | 2W/3+2 |
| ... | ... | ... | ... |
| W/3 | W/3 | 2W/3 | W |
◆ cltxg4X
| cltxg4X = lib_mvIMPACT_acquire.cltxg4X |
Four taps.
Each tap will transmit one fourth of each line, pixel are transmitted from left to right. Sorting of data needed.
The first tap will transmit the first quarter of each line, the second tap will transmit the second quarter etc.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 | Pixel from Tap 4 |
| 1 | 1 | W/4+1 | 2W/4+1 | 3W/4+1 |
| 2 | 2 | W/4+2 | 2W/4+2 | 3W/4+2 |
| ... | ... | ... | ... | ... |
| W/4 | W/4 | 2W/4 | 3W/4 | W |
◆ cltxg4X2
| cltxg4X2 = lib_mvIMPACT_acquire.cltxg4X2 |
Eight taps.
Every two taps will transmit one quarter of the line. Sorting of data needed.
All tap pairs will transmit their data from left to right.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 | Pixel from Tap 4 | Pixel from Tap 5 | Pixel from Tap 6 | Pixel from Tap 7 | Pixel from Tap 8 |
| 1 | 1 | 2 | W/4+1 | W/4+2 | W/2+1 | W/2+2 | 3W/4+1 | 3W/4+2 |
| 2 | 3 | 4 | W/4+3 | W/4+4 | W/2+3 | W/2+4 | 3W/4+3 | 3W/4+4 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... |
| W/8 | W/4-1 | W/4 | W/2-1 | W/2 | 3W/4-1 | 3W/4 | W-1 | W |
◆ cltxg4X2E
| cltxg4X2E = lib_mvIMPACT_acquire.cltxg4X2E |
Eight taps.
Every two taps will transmit one quarter of the line. Sorting of data needed.
Taps 1 to 4 will transmit the data from left to right, while taps 5 to 8 will transmit the data from right to left.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 | Pixel from Tap 4 | Pixel from Tap 5 | Pixel from Tap 6 | Pixel from Tap 7 | Pixel from Tap 8 |
| 1 | 1 | 2 | W/4+1 | W/4+2 | 3W/4-1 | 3W/4 | W-1 | W |
| 2 | 3 | 4 | W/4+3 | W/4+4 | 3W/4-3 | 3W/4-2 | W-3 | W-2 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... |
| W/8 | W/4-1 | W/4 | W/2-1 | W/2 | W/2+1 | W/2+2 | 3W/4+1 | 3W/4+2 |
- Since
- 2.4.0
◆ cltxg4XE
| cltxg4XE = lib_mvIMPACT_acquire.cltxg4XE |
Four taps.
Each tap will transmit one quarter of the image. Sorting of data needed.
The first two taps will transmit the data from left to right, while the second two taps will transfer the data from right to left.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 | Pixel from Tap 4 |
| 1 | 1 | W/4+1 | 3W/4 | W |
| 2 | 2 | W/4+2 | 3W/4-1 | W-1 |
| ... | ... | ... | ... | ... |
| W/4 | W/4 | W/2 | W/2+1 | 3W/4+1 |
◆ cltxg8X
| cltxg8X = lib_mvIMPACT_acquire.cltxg8X |
Eight taps.
Each tap will transmit one eighth of each line, pixel are transmitted from left to right. Sorting of data needed.
The first tap will transmit the first eighth of each line, the second tap will transmit the second eighth etc.
| clock cycle | Pixel from Tap 1 | Pixel from Tap 2 | Pixel from Tap 3 | Pixel from Tap 4 | Pixel from Tap 5 | Pixel from Tap 6 | Pixel from Tap 7 | Pixel from Tap 8 |
| 1 | 1 | W/8+1 | 2W/8+1 | 3W/8+1 | 4W/8+1 | 5W/8+1 | 6W/8+1 | 7W/8+1 |
| 2 | 2 | W/8+2 | 2W/8+2 | 3W/8+2 | 4W/8+2 | 5W/8+2 | 6W/8+2 | 7W/8+2 |
| ... | ... | ... | ... | ... | ... | ... | ... | ... |
| W/8 | W/8 | 2W/8 | 3W/8 | 4W/8 | 5W/8 | 6W/8 | 7W/8 | W |
◆ cltyg1Y
| cltyg1Y = lib_mvIMPACT_acquire.cltyg1Y |
Lines from top to bottom.
◆ cltyg1Y2
| cltyg1Y2 = lib_mvIMPACT_acquire.cltyg1Y2 |
Two neighbouring lines are transmitted during one FVAL.
◆ cltyg2YE
| cltyg2YE = lib_mvIMPACT_acquire.cltyg2YE |
One line from top and one line from bottom are transmitted during one FVAL.
◆ co2xComposite
| co2xComposite = lib_mvIMPACT_acquire.co2xComposite |
Two cameras will offer two synchronous analogue signals.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ co3GSDI
| co3GSDI = lib_mvIMPACT_acquire.co3GSDI |
The camera will offer serial digital interface(SDI) 3G signal.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ co3xComposite
| co3xComposite = lib_mvIMPACT_acquire.co3xComposite |
Three cameras will offer three synchronous analogue signals.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ co4xComposite
| co4xComposite = lib_mvIMPACT_acquire.co4xComposite |
Four cameras will offer four synchronous analogue signals.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coAuto
| coAuto = lib_mvIMPACT_acquire.coAuto |
Auto mode.
Here the capture device tries to guess how the data is transmitted.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coBase
| coBase = lib_mvIMPACT_acquire.coBase |
The camera will offer CameraLink® Base compliant image data.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coComposite
| coComposite = lib_mvIMPACT_acquire.coComposite |
The camera will offer an analogue composite video signal.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coDigital
| coDigital = lib_mvIMPACT_acquire.coDigital |
The camera will offer digital image data.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coFull
| coFull = lib_mvIMPACT_acquire.coFull |
The camera will offer CameraLink® Full compliant image data.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coHDSDI
| coHDSDI = lib_mvIMPACT_acquire.coHDSDI |
The camera will offer serial digital interface(SDI) HD signal.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coMedium
| coMedium = lib_mvIMPACT_acquire.coMedium |
The camera will offer CameraLink® Medium compliant image data.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coRGB
| coRGB = lib_mvIMPACT_acquire.coRGB |
The camera will offer an analogue RGB signal.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coSDSDI
| coSDSDI = lib_mvIMPACT_acquire.coSDSDI |
The camera will offer serial digital interface(SDI) SD signal.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coSVideo
| coSVideo = lib_mvIMPACT_acquire.coSVideo |
The camera will offer an analogue SVideo signal.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ coUndefined
| coUndefined = lib_mvIMPACT_acquire.coUndefined |
Specifies an undefined output.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cpc10000KHz
| cpc10000KHz = lib_mvIMPACT_acquire.cpc10000KHz |
10 MHz pixel clock.
◆ cpc12000KHz
| cpc12000KHz = lib_mvIMPACT_acquire.cpc12000KHz |
12 MHz pixel clock.
◆ cpc13500KHz
| cpc13500KHz = lib_mvIMPACT_acquire.cpc13500KHz |
13.5 MHz pixel clock.
◆ cpc20000KHz
| cpc20000KHz = lib_mvIMPACT_acquire.cpc20000KHz |
20 MHz pixel clock.
◆ cpc24000KHz
| cpc24000KHz = lib_mvIMPACT_acquire.cpc24000KHz |
24 MHz pixel clock.
◆ cpc24540KHz
| cpc24540KHz = lib_mvIMPACT_acquire.cpc24540KHz |
24.54 MHz pixel clock.
◆ cpc27000KHz
| cpc27000KHz = lib_mvIMPACT_acquire.cpc27000KHz |
27 MHz pixel clock.
◆ cpc32000KHz
| cpc32000KHz = lib_mvIMPACT_acquire.cpc32000KHz |
32 MHz pixel clock.
◆ cpc37600KHz
| cpc37600KHz = lib_mvIMPACT_acquire.cpc37600KHz |
37.6 MHz pixel clock.
◆ cpc40000KHz
| cpc40000KHz = lib_mvIMPACT_acquire.cpc40000KHz |
40 MHz pixel clock.
◆ cpc50000KHz
| cpc50000KHz = lib_mvIMPACT_acquire.cpc50000KHz |
50 MHz pixel clock.
◆ cpc57600KHz
| cpc57600KHz = lib_mvIMPACT_acquire.cpc57600KHz |
57.6 MHz pixel clock.
◆ cpc6000KHz
| cpc6000KHz = lib_mvIMPACT_acquire.cpc6000KHz |
6 MHz pixel clock.
◆ cpc8000KHz
| cpc8000KHz = lib_mvIMPACT_acquire.cpc8000KHz |
8 MHz pixel clock.
◆ cpcHighSpeed
| cpcHighSpeed = lib_mvIMPACT_acquire.cpcHighSpeed |
High speed sensor clocking.
This is a legacy mode used by some devices only.
◆ cpcStandard
| cpcStandard = lib_mvIMPACT_acquire.cpcStandard |
Standard sensor clocking.
This is a legacy mode used by some devices only.
◆ cpmAuto
| cpmAuto = lib_mvIMPACT_acquire.cpmAuto |
The driver decides (depending on the connected camera) what kind of color processing has to be applied.
◆ cpmBayer
| cpmBayer = lib_mvIMPACT_acquire.cpmBayer |
A Bayer color conversion will be applied before the image is transferred to the user.
◆ cpmBayerToMono
| cpmBayerToMono = lib_mvIMPACT_acquire.cpmBayerToMono |
A Bayer to mono conversion will be applied before the image is transferred to the user.
◆ cpmRaw
| cpmRaw = lib_mvIMPACT_acquire.cpmRaw |
No color processing will be performed.
◆ cpmRawToPlanes
| cpmRawToPlanes = lib_mvIMPACT_acquire.cpmRawToPlanes |
No color processing will be performed but the packed raw Bayer data will be re-arranged within the buffer.
In the resulting image the top left quarter of the image will contain the red pixels, the top right quarter the blue pixels, the lower left quarter the green pixels from the red line and the lower right quarter the green pixels from the blue line:
// w: width, h: height
R(0, 0) R(0, 1), ... R(0, (w-1)/2) B(0, 0) B(0, 1), ... B(0, (w-1)/2)
R(1, 0) R(1, 1), ... R(1, (w-1)/2) B(1, 0) B(1, 1), ... B(1, (w-1)/2)
.
.
.
R((h-1/2), 0) R((h-1/2), 1), ... R((h-1/2), (w-1)/2) B((h-1/2), 0) B((h-1/2), 1), ... B((h-1/2), (w-1)/2)
G(R)(0, 0) G(R)(0, 1), ... G(R)(0, (w-1)/2) G(B)(0, 0) G(B)(0, 1), ... G(B)(0, (w-1)/2)
G(R)(1, 0) G(R)(1, 1), ... G(R)(1, (w-1)/2) G(B)(1, 0) G(B)(1, 1), ... G(B)(1, (w-1)/2)
.
.
.
G(R)((h-1/2), 0) G(R)((h-1/2), 1), ... G(R)((h-1/2), (w-1)/2) G(B)((h-1/2), 0) G(B)((h-1/2), 1), ... G(B)((h-1/2), (w-1)/2)
◆ crBoolean
| crBoolean = lib_mvIMPACT_acquire.crBoolean |
Defines a boolean feature.
This could be displayed to the user as a check box.
◆ crDirectoryName
| crDirectoryName = lib_mvIMPACT_acquire.crDirectoryName |
Defines a feature representing a directory name.
This could be displayed to the user as a directory selection dialog.
◆ crFileName
| crFileName = lib_mvIMPACT_acquire.crFileName |
Defines a feature representing a file name.
This could be displayed to the user as a file selection dialog.
◆ crHexNumber
| crHexNumber = lib_mvIMPACT_acquire.crHexNumber |
Defines a feature representing a hexadecimal number.
◆ crIPv4Address
| crIPv4Address = lib_mvIMPACT_acquire.crIPv4Address |
Defines a feature representing an IPv4 address.
This could be displayed to the user as a custom IPv4 edit control.
◆ crLinear
| crLinear = lib_mvIMPACT_acquire.crLinear |
Defines a feature with linear behaviour.
One possible editor would be a slider with linear behaviour.
◆ crLogarithmic
| crLogarithmic = lib_mvIMPACT_acquire.crLogarithmic |
Defines a feature with logarithmic behaviour.
One possible editor would be a slider with logarithmic behaviour.
◆ crMACAddress
| crMACAddress = lib_mvIMPACT_acquire.crMACAddress |
Defines a feature representing a MAC address.
This could be displayed to the user as a custom MAC address edit control.
◆ crPureNumber
| crPureNumber = lib_mvIMPACT_acquire.crPureNumber |
Defines a feature representing a pure number.
This could be displayed to the user as an edit control.
◆ crUndefined
| crUndefined = lib_mvIMPACT_acquire.crUndefined |
◆ csmArea
| csmArea = lib_mvIMPACT_acquire.csmArea |
The connected camera is an area scan camera.
◆ csmElectronicRollingShutter
| csmElectronicRollingShutter = lib_mvIMPACT_acquire.csmElectronicRollingShutter |
Electronic rolling shutter mode (ERS).
Start and stop of integration occurs on a line by line base. Integration time is the same for all lines bit timing is slightly different
◆ csmExtractSingle
| csmExtractSingle = lib_mvIMPACT_acquire.csmExtractSingle |
Only one selectable channel will be extracted and forwarded.
◆ csmFrameShutter
| csmFrameShutter = lib_mvIMPACT_acquire.csmFrameShutter |
Standard Frame-Shutter mode.
Start and stop of integration occurs at the same time for all pixels
◆ csmFrameShutterWithFastCenterReadout
| csmFrameShutterWithFastCenterReadout = lib_mvIMPACT_acquire.csmFrameShutterWithFastCenterReadout |
Start and stop of integration will happen at the same time for all pixels.
Uses optimization for fast centered Readout.
◆ csmGlobalResetRelease
| csmGlobalResetRelease = lib_mvIMPACT_acquire.csmGlobalResetRelease |
Global reset release shutter (GRR).
Start of integration occurs at the same time for all pixels. End of integration happens on a line per line base like with ERS. This is only useful with special lighting or an mechanical extra shutter
◆ csmHorizontal
| csmHorizontal = lib_mvIMPACT_acquire.csmHorizontal |
The channels will be re-arranged next to each other thus the resulting image will have the same height but 'channel count' times more pixels per line.
◆ csmLine
| csmLine = lib_mvIMPACT_acquire.csmLine |
The connected camera is an line scan camera.
◆ csmVertical
| csmVertical = lib_mvIMPACT_acquire.csmVertical |
The channels will be re-arranged one after the other thus the resulting image will have the same width but 'channel count' times more lines than the input image.
◆ cspbr115200
| cspbr115200 = lib_mvIMPACT_acquire.cspbr115200 |
115200 baud
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cspbr19200
| cspbr19200 = lib_mvIMPACT_acquire.cspbr19200 |
19200 baud
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cspbr230400
| cspbr230400 = lib_mvIMPACT_acquire.cspbr230400 |
230400 baud
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cspbr38400
| cspbr38400 = lib_mvIMPACT_acquire.cspbr38400 |
38400 baud
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cspbr460800
| cspbr460800 = lib_mvIMPACT_acquire.cspbr460800 |
460800 baud
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cspbr57600
| cspbr57600 = lib_mvIMPACT_acquire.cspbr57600 |
57600 baud
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cspbr921600
| cspbr921600 = lib_mvIMPACT_acquire.cspbr921600 |
921600 baud
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cspbr9600
| cspbr9600 = lib_mvIMPACT_acquire.cspbr9600 |
9600 baud
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ cticmmDeviceSpecific
| cticmmDeviceSpecific = lib_mvIMPACT_acquire.cticmmDeviceSpecific |
A device specific internally defined correction matrix.
This will almost always be the best selection as then the driver internally uses the best matrix for known products.
◆ cticmmUser
| cticmmUser = lib_mvIMPACT_acquire.cticmmUser |
A user defined correction matrix.
◆ ctList
| ctList = lib_mvIMPACT_acquire.ctList |
A list object.
Lists can contain other components like lists, methods and properties. Thus lists can be used to build up hierarchical structures of different components.
◆ ctmContinuous
| ctmContinuous = lib_mvIMPACT_acquire.ctmContinuous |
Don't wait for trigger.
In this mode the camera continuously exposes images with the current settings.
However images are not transferred to the host system automatically in this mode, so NO CPU load or whatsoever is produced in this mode when the driver isn't asked for images by the user.
This mode is recommended for most applications and will be available for every image sensor.
When the user requests an image the image AFTER the next frame start will be returned. In applications that need fast but NOT continuous image transfer the mvIMPACT.acquire.ctmOnDemand therefore might be more interesting.
◆ ctMeth
| ctMeth = lib_mvIMPACT_acquire.ctMeth |
A method object.
Method objects provide the possibility to organize functions in lists.
◆ ctmFramerateControlled
| ctmFramerateControlled = lib_mvIMPACT_acquire.ctmFramerateControlled |
Start the exposure of a frame when the trigger input level changes from high to low or from low to high.
This mode is behaves like ctmContinuous but allows the FPS-Rate to be controlled directly.
◆ ctmGreyRamp
| ctmGreyRamp = lib_mvIMPACT_acquire.ctmGreyRamp |
A grey gradient will be transmitted by the camera.
◆ ctmMovingColor
| ctmMovingColor = lib_mvIMPACT_acquire.ctmMovingColor |
A color test image with some moving components in it will be displayed.
◆ ctmOff
| ctmOff = lib_mvIMPACT_acquire.ctmOff |
The 'normal' camera image will be transmitted.
◆ ctmOnAnyEdge
| ctmOnAnyEdge = lib_mvIMPACT_acquire.ctmOnAnyEdge |
Start the exposure of a frame when the trigger input level changes from high to low or from low to high.
◆ ctmOnDemand
| ctmOnDemand = lib_mvIMPACT_acquire.ctmOnDemand |
Start frame expose when the software asks for an image.
Here without image requests by the user the image sensor will not expose images. An exposure and image transmission will start immediately after at least one images has been requested by the user.
When e.g. a camera in free running mode captures 30 images per sec. and the user needs an image every 40 ms (25 fps) this mode might be more suitable than mvIMPACT.acquire.ctmContinuous as in the continuous mode when asking for an image every 40 ms the user might need to wait for the next frame start which at 30 Hz in the worst case would result in a capture time of (1/30Hz)*2 = 66.6 ms when an image start has just been missed. In mvIMPACT.acquire.ctmOnDemand however the image exposure will be started immediately after the request reaches the camera thus no delay will be introduced.
- Note
- In applications where the capture time can be disregarded because either the transfer time is much higher or the capture frequency is very low the difference between the mvIMPACT.acquire.ctmOnDemand and the mvIMPACT.acquire.ctmContinuous can be disregarded as well. However in this case mvIMPACT.acquire.ctmContinuous is recommended as this mode will be available for every sensor type and is more universal.
◆ ctmOnFallingEdge
| ctmOnFallingEdge = lib_mvIMPACT_acquire.ctmOnFallingEdge |
Start the exposure of a frame when the trigger input level changes from high to low.
◆ ctmOnHighExpose
| ctmOnHighExpose = lib_mvIMPACT_acquire.ctmOnHighExpose |
Start frame expose when the trigger input level rises above the trigger threshold and expose while the trigger input level remains above this threshold.
◆ ctmOnHighLevel
| ctmOnHighLevel = lib_mvIMPACT_acquire.ctmOnHighLevel |
Start the exposure of a frame when the trigger input is above the trigger threshold.
Each time an image is requested and the trigger signal is above the trigger threshold a image will be captured.
◆ ctmOnLowExpose
| ctmOnLowExpose = lib_mvIMPACT_acquire.ctmOnLowExpose |
Start frame expose when the trigger input level falls below the trigger threshold and expose while the trigger input level remains below this threshold.
◆ ctmOnLowLevel
| ctmOnLowLevel = lib_mvIMPACT_acquire.ctmOnLowLevel |
Start the exposure of a frame when the trigger input is below the trigger threshold.
Each time an image is requested and the trigger signal is below the trigger threshold a image will be captured.
◆ ctmOnRisingEdge
| ctmOnRisingEdge = lib_mvIMPACT_acquire.ctmOnRisingEdge |
Start the exposure of a frame when the trigger input level changes from low to high.
◆ ctmWBTest
| ctmWBTest = lib_mvIMPACT_acquire.ctmWBTest |
A raw white Bayer image will be transmitted.
◆ ctocmmUser
| ctocmmUser = lib_mvIMPACT_acquire.ctocmmUser |
A user defined correction matrix.
◆ ctocmmXYZToAdobeRGB_D50
| ctocmmXYZToAdobeRGB_D50 = lib_mvIMPACT_acquire.ctocmmXYZToAdobeRGB_D50 |
Will apply the XYZ to Adobe RGB matrix with a D50 white reference.
The following matrix will be applied:
| Row 0 | Row 1 | Row 2 |
| 1.9624274 | -0.6105343 | -0.3413404 |
| -0.9787684 | 1.9161415 | 0.0334540 |
| 0.0286869 | -0.1406752 | 1.3487655 |
◆ ctocmmXYZToAdobeRGB_D65
| ctocmmXYZToAdobeRGB_D65 = lib_mvIMPACT_acquire.ctocmmXYZToAdobeRGB_D65 |
Will apply the XYZ to Adobe RGB matrix with a D65 white reference.
The following matrix will be applied:
| Row 0 | Row 1 | Row 2 |
| 2.0413690 | -0.5649464 | -0.3446944 |
| -0.9692660 | 1.8760108 | 0.0415560 |
| 0.0134474 | -0.1183897 | 1.0154096 |
◆ ctocmmXYZTosRGB_D50
| ctocmmXYZTosRGB_D50 = lib_mvIMPACT_acquire.ctocmmXYZTosRGB_D50 |
Will apply the XYZ to sRGB matrix with a D50 white reference.
The following matrix will be applied:
| Row 0 | Row 1 | Row 2 |
| 3.1338561 | -1.6168667 | -0.4906146 |
| -0.9787684 | 1.9161415 | 0.0334540 |
| 0.0719453 | -0.2289914 | 1.4052427 |
◆ ctocmmXYZTosRGB_D65
| ctocmmXYZTosRGB_D65 = lib_mvIMPACT_acquire.ctocmmXYZTosRGB_D65 |
Will apply the XYZ to sRGB matrix with a D65 white reference.
The following matrix will be applied:
| Row 0 | Row 1 | Row 2 |
| 3.2404542 | -1.5371385 | -0.4985314 |
| -0.9692660 | 1.8760108 | 0.0415560 |
| 0.0556434 | -0.2040259 | 1.0572252 |
◆ ctocmmXYZToWideGamutRGB_D50
| ctocmmXYZToWideGamutRGB_D50 = lib_mvIMPACT_acquire.ctocmmXYZToWideGamutRGB_D50 |
Will apply the XYZ to White Gamut RGB matrix with a D50 white reference.
The following matrix will be applied:
| Row 0 | Row 1 | Row 2 |
| 1.4628067 | -0.1840623 | -0.2743606 |
| -0.5217933, | 1.4472381 | 0.0677227 |
| 0.0349342 | -0.0968930 | 1.2884099 |
◆ ctOnChanged
| ctOnChanged = lib_mvIMPACT_acquire.ctOnChanged |
Execute callback whenever this component has been modified.
◆ ctOnReadData
| ctOnReadData = lib_mvIMPACT_acquire.ctOnReadData |
Executed when a property's value is read.
The callback is executed before the value is returned to the user. This allows i.e. a driver to determine the value for this property only if the user is interested in its data.
◆ ctOnRefreshCache
| ctOnRefreshCache = lib_mvIMPACT_acquire.ctOnRefreshCache |
Executed when a component is accessed (read or write) and some of the internal data needs to be refreshed from an external source.
The callback is executed before the component data is accessed. This allows i.e. a driver to update the data before.
◆ ctOnWriteData
| ctOnWriteData = lib_mvIMPACT_acquire.ctOnWriteData |
Executed when a property's value is written.
The callback is executed before the value is actually assigned. This allows i.e. a driver to validate if this is a valid value for the property.
◆ ctProp
| ctProp = lib_mvIMPACT_acquire.ctProp |
A property type.
This type will never occur in a real world application. It's just used to build up the other types. Properties can be used to store user specific data in a structured way.
◆ ctPropFloat
| ctPropFloat = lib_mvIMPACT_acquire.ctPropFloat |
Defines a property for floating point values.
◆ ctPropInt
| ctPropInt = lib_mvIMPACT_acquire.ctPropInt |
Defines a property for 32 bit integer values.
◆ ctPropInt64
| ctPropInt64 = lib_mvIMPACT_acquire.ctPropInt64 |
Defines a property for 64 bit integer values.
◆ ctPropPtr
| ctPropPtr = lib_mvIMPACT_acquire.ctPropPtr |
Defines a property for pointer values.
◆ ctPropString
| ctPropString = lib_mvIMPACT_acquire.ctPropString |
Defines a property for string values.
◆ ctsDigIn0
| ctsDigIn0 = lib_mvIMPACT_acquire.ctsDigIn0 |
Uses digital input 0 as the source for the trigger signal.
◆ ctsDigIn1
| ctsDigIn1 = lib_mvIMPACT_acquire.ctsDigIn1 |
Use digital input 1 as the source for the trigger signal.
◆ ctsDigOut0
| ctsDigOut0 = lib_mvIMPACT_acquire.ctsDigOut0 |
Uses digital output 0 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)).
◆ ctsDigOut1
| ctsDigOut1 = lib_mvIMPACT_acquire.ctsDigOut1 |
Uses digital output 1 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)).
◆ ctsDigOut2
| ctsDigOut2 = lib_mvIMPACT_acquire.ctsDigOut2 |
Uses digital output 2 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)).
◆ ctsDigOut3
| ctsDigOut3 = lib_mvIMPACT_acquire.ctsDigOut3 |
Uses digital output 3 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)).
◆ ctsRTCtrl
| ctsRTCtrl = lib_mvIMPACT_acquire.ctsRTCtrl |
Use real time controller (RTCtrl) as the source for the trigger signal.
◆ cvar
| cvar = lib_mvIMPACT_acquire.cvar |
◆ cvBeginner
| cvBeginner = lib_mvIMPACT_acquire.cvBeginner |
Defines a feature that should be visible for all users via the GUI and API.
This is the default visibility if no visibility has been specified for a particular component.
◆ cvExpert
| cvExpert = lib_mvIMPACT_acquire.cvExpert |
Defines a feature that requires a more in-depth knowledge of the functionality.
This is the preferred visibility level for all advanced features.
◆ cvGuru
| cvGuru = lib_mvIMPACT_acquire.cvGuru |
Defines an advanced feature that if not configured correctly might result in unexpected behaviour.
◆ cvInvisible
| cvInvisible = lib_mvIMPACT_acquire.cvInvisible |
Defines a feature that should not be displayed in a GUI but is still accessible via API function calls.
◆ damControl
| damControl = lib_mvIMPACT_acquire.damControl |
Requested or obtained control access to the device.
Properties can be read and changed, other applications might establish read access.
◆ damExclusive
| damExclusive = lib_mvIMPACT_acquire.damExclusive |
Requested or obtained exclusive access to the device.
Properties can be read and changed, other applications can't establish access to the device.
◆ damNone
| damNone = lib_mvIMPACT_acquire.damNone |
No access to the device.
◆ damRead
| damRead = lib_mvIMPACT_acquire.damRead |
Requested or obtained read access to the device.
Properties can be read but can't be changed.
◆ damUnknown
| damUnknown = lib_mvIMPACT_acquire.damUnknown |
Unknown device access mode.
◆ danpsmHighToLow
| danpsmHighToLow = lib_mvIMPACT_acquire.danpsmHighToLow |
Start with the maximum possible packet size.
If set to mvIMPACT.acquire.danpsmHighToLow the packet size auto negotiation starts with the NICs current MTU value. If this value is too large (in terms of not all network components support it) decreasing sizes will be tried until the optimal (thus highest value supported by all network components) has been found.
- Note
- This mode is optimal when working with network interfaces where Jumbo frames are enabled.
◆ danpsmLowToHigh
| danpsmLowToHigh = lib_mvIMPACT_acquire.danpsmLowToHigh |
Start with the minimal possible packet size.
If set to mvIMPACT.acquire.danpsmLowToHigh the packet size auto negotiation starts with the smallest possible MTU. Afterwards increasing sizes will be tried until the optimal (thus highest value supported by all network components) has been found.
- Note
- This mode is optimal when nothing is known about the network configuration.
◆ daoEmbeddedImageInfo
| daoEmbeddedImageInfo = lib_mvIMPACT_acquire.daoEmbeddedImageInfo |
Embed sensor specific info into the image readout buffer.
◆ daoEnablePerChannelOffsetCorrection
| daoEnablePerChannelOffsetCorrection = lib_mvIMPACT_acquire.daoEnablePerChannelOffsetCorrection |
Enable per channel offset correction.
Allow per channel offset correction in non auto offset mode for sensors with a Bayer (RGGB) based analog path. The per channel offset value will be added to the master offset (Offset_pc).
◆ daoImageAverage
| daoImageAverage = lib_mvIMPACT_acquire.daoImageAverage |
Calculate the average intensity value of the image and return as part of the request.
◆ daoLowFrameRateOptimization
| daoLowFrameRateOptimization = lib_mvIMPACT_acquire.daoLowFrameRateOptimization |
Enable low frame rate optimization.
This will result in a much reduced variation in the offset signal when changing the sensor frame rate or running the sensor at low frame rates. The offset will change slightly if switched on and the signal response is slightly reduced.
◆ daoLowLight
| daoLowLight = lib_mvIMPACT_acquire.daoLowLight |
Put camera in low light mode.
This is a special feature offered by some sensors. Typically this will enable an additional analogue gain that will increase both the luminance and the noise of the resulting image. This feature can not be configured any further and there also is no additional information available on this topic.
◆ daoOff
| daoOff = lib_mvIMPACT_acquire.daoOff |
No advanced option selected.
◆ daoOnDemandTriggerPreShot
| daoOnDemandTriggerPreShot = lib_mvIMPACT_acquire.daoOnDemandTriggerPreShot |
Enable on demand trigger pre-shot option.
This will trigger an internal image capture cycle on the sensor prior to the user requested frame. Can be used to remove variations in image quality when working with unstable frame rates.
- Since
- 2.5.0
◆ daoPipelinedGainExposeControl
| daoPipelinedGainExposeControl = lib_mvIMPACT_acquire.daoPipelinedGainExposeControl |
Enable pipelined Gain/Exposure control.
This will result in a changed exposure or gain value becoming active not with the next frame but the one after that. Changing Gain/Exposure will be faster in pipelined Gain/Exposure control mode.
- Since
- 2.1.3
◆ daoTriggerSensorColumnCalibration
| daoTriggerSensorColumnCalibration = lib_mvIMPACT_acquire.daoTriggerSensorColumnCalibration |
Trigger sensor column correction.
When switched on this triggers a single column correction calibration process when requesting an image. To do it again switch it off and on again. This should be done while no acquisition is running. Changing gain or AOI could make such a recalibration necessary.
◆ daoUseRawSensorGain
| daoUseRawSensorGain = lib_mvIMPACT_acquire.daoUseRawSensorGain |
Enable raw sensor gain.
Use mathematical correct gain for sensor setting. Thus increasing the gain by 6 dB will actually result in a factor of 2. However with this option enabled the gain range will include values so low that the pixel saturation charge will be with in ADC digitizer range thus an over-saturated image will contain pixels that do NOT contain the maximum value for the given pixel format.
- Since
- 2.5.6
◆ dc3DCamera
| dc3DCamera = lib_mvIMPACT_acquire.dc3DCamera |
A 3D camera.
◆ dcCamera
| dcCamera = lib_mvIMPACT_acquire.dcCamera |
A plain camera device.
◆ dcCameraDescriptionSupport
| dcCameraDescriptionSupport = lib_mvIMPACT_acquire.dcCameraDescriptionSupport |
This device supports camera descriptions.
This is a feature mainly interesting for frame grabbers.
◆ dcEventSupport
| dcEventSupport = lib_mvIMPACT_acquire.dcEventSupport |
This device supports events.
◆ dcfmCalibrateDarkCurrent
| dcfmCalibrateDarkCurrent = lib_mvIMPACT_acquire.dcfmCalibrateDarkCurrent |
The next selected number of images will be taken for calculating the dark current correction image.
In this mode after the correction image has been calculated the mode will automatically switch back to mvIMPACT.acquire.dcfmOff
◆ dcfmOff
| dcfmOff = lib_mvIMPACT_acquire.dcfmOff |
The filter is switched off.
◆ dcfmOn
| dcfmOn = lib_mvIMPACT_acquire.dcfmOn |
The filter is switched on.
◆ dcfmTransmitCorrectionImage
| dcfmTransmitCorrectionImage = lib_mvIMPACT_acquire.dcfmTransmitCorrectionImage |
In this mode whenever reaching this filter, the captured image will be replaced by the last correction image, that has been created as a result of the filter being calibrated.
- Since
- 2.5.9
◆ dcFrameGrabber
| dcFrameGrabber = lib_mvIMPACT_acquire.dcFrameGrabber |
A frame grabber device.
◆ dcGeneric
| dcGeneric = lib_mvIMPACT_acquire.dcGeneric |
A generic device.
◆ dcHotplugable
| dcHotplugable = lib_mvIMPACT_acquire.dcHotplugable |
This is a device that supports hot plugging.
◆ dcIntelligentCamera
| dcIntelligentCamera = lib_mvIMPACT_acquire.dcIntelligentCamera |
An intelligent camera device.
◆ dcNone
| dcNone = lib_mvIMPACT_acquire.dcNone |
A dummy constant to indicate, that this device does not have any capabilities defined by other constants belonging to this enumeration.
◆ dcNonVolatileUserMemory
| dcNonVolatileUserMemory = lib_mvIMPACT_acquire.dcNonVolatileUserMemory |
This device has non volatile memory, the user can write to and read from.
◆ dcSelectableVideoInputs
| dcSelectableVideoInputs = lib_mvIMPACT_acquire.dcSelectableVideoInputs |
This is a device, that has more than one video input channel.
◆ ddomDigitalSignalPassThrough
| ddomDigitalSignalPassThrough = lib_mvIMPACT_acquire.ddomDigitalSignalPassThrough |
A signal connected to a digital input is passed through to this digital output.
◆ ddomDigitalSignalPassThroughInv
| ddomDigitalSignalPassThroughInv = lib_mvIMPACT_acquire.ddomDigitalSignalPassThroughInv |
A signal connected to a digital input is inverted and passed to this digital output.
◆ ddomExposureActive
| ddomExposureActive = lib_mvIMPACT_acquire.ddomExposureActive |
The digital output will change its state during the active exposure period of the image sensor and will switch back to its initial state again once the exposure period is over.
◆ ddomExposureAndAcquisitionActive
| ddomExposureAndAcquisitionActive = lib_mvIMPACT_acquire.ddomExposureAndAcquisitionActive |
When there is at least one outstanding request the digital output will change its state during the active exposure period of the image sensor and will switch back to its initial state again once the exposure period is over.
◆ ddomInternalVD
| ddomInternalVD = lib_mvIMPACT_acquire.ddomInternalVD |
An internal VD sync.
signal will be passed to this digital output.
In case of a camera this e.g. might be the cameras internal VD signal. This then can be used to synchronize two or more cameras.
◆ ddomManual
| ddomManual = lib_mvIMPACT_acquire.ddomManual |
The digital output can be switched manually.
◆ ddomPulse
| ddomPulse = lib_mvIMPACT_acquire.ddomPulse |
A single pulse will be generated on the digital output.
◆ ddomRealTimeController
| ddomRealTimeController = lib_mvIMPACT_acquire.ddomRealTimeController |
The digital output is controlled by a Real Time Controller.
◆ ddomTemperatureOutOfRange
| ddomTemperatureOutOfRange = lib_mvIMPACT_acquire.ddomTemperatureOutOfRange |
Will change the state whenever the device temperature moves in or out of defined limits(subject to change!).
◆ ddomUser
| ddomUser = lib_mvIMPACT_acquire.ddomUser |
A user defined signal will be generated on the digital output.
◆ DEV_ACCESS_DENIED
| DEV_ACCESS_DENIED = lib_mvIMPACT_acquire.DEV_ACCESS_DENIED |
The requested access to a device could not be granted.
There are multiple reasons for this error code. Detailed information can be found in the *.log-file.
POSSIBLE CAUSES:
• an application tries to access a device exclusively that is already open in another process
• a network device has already been opened with control access from another system and the current system also tries to establish control access to the device
• an application tried to execute a function that is currently not available
• an application tries to write to a read-only location.
- Since
- 1.10.39
◆ DEV_CREATE_SETTING_FAILED
| DEV_CREATE_SETTING_FAILED = lib_mvIMPACT_acquire.DEV_CREATE_SETTING_FAILED |
The creation of a setting failed.
This can either happen, when a setting with the same name as the one the user tried to create already exists or if the system can't allocate memory for the new setting.
◆ DEV_HANDLE_INVALID
| DEV_HANDLE_INVALID = lib_mvIMPACT_acquire.DEV_HANDLE_INVALID |
A driver function has been called with an invalid device handle.
◆ DEV_INPUT_PARAM_INVALID
| DEV_INPUT_PARAM_INVALID = lib_mvIMPACT_acquire.DEV_INPUT_PARAM_INVALID |
A driver function has been called but one or more of the input parameters are invalid.
There are several possible reasons for this error:
• an unassigned pointer has been passed to a function, that requires a valid pointer.
• one or more of the passed parameters are of an incorrect type.
• one or more parameters contain an invalid value (e.g. a filename that points to a file that can't be found, a value, that is larger or smaller than the allowed values.
• within the current setup one or more parameters impose restrictions on the requested operation that don't allow its execution.
◆ DEV_INTERNAL_ERROR
| DEV_INTERNAL_ERROR = lib_mvIMPACT_acquire.DEV_INTERNAL_ERROR |
Some kind of internal error occurred in the device driver.
More information can be found in the *.log-file or the debug output.
◆ DEV_INVALID_REQUEST_NUMBER
| DEV_INVALID_REQUEST_NUMBER = lib_mvIMPACT_acquire.DEV_INVALID_REQUEST_NUMBER |
The number for the mvIMPACT.acquire.Request object is invalid.
The max. number for a mvIMPACT.acquire.Request object is the value of the property RequestCount in the mvIMPACT.acquire.SystemSettings list - 1.
◆ DEV_INVALID_RTC_NUMBER
| DEV_INVALID_RTC_NUMBER = lib_mvIMPACT_acquire.DEV_INVALID_RTC_NUMBER |
The requested real time controller is not available for this device.
◆ DEV_LOCKED_REQUEST_IN_QUEUE
| DEV_LOCKED_REQUEST_IN_QUEUE = lib_mvIMPACT_acquire.DEV_LOCKED_REQUEST_IN_QUEUE |
A Request that hasn't been unlocked has been passed back to the driver.
This error might occur if the user requested an image from the driver but hasn't unlocked the mvIMPACT.acquire.Request that will be used for this new image.
◆ DEV_NO_FREE_REQUEST_AVAILABLE
| DEV_NO_FREE_REQUEST_AVAILABLE = lib_mvIMPACT_acquire.DEV_NO_FREE_REQUEST_AVAILABLE |
The user requested a new image, but no free mvIMPACT.acquire.Request object is available to process this request.
◆ DEV_REQUEST_ALREADY_IN_USE
| DEV_REQUEST_ALREADY_IN_USE = lib_mvIMPACT_acquire.DEV_REQUEST_ALREADY_IN_USE |
This request is currently used by the driver.
This error may occur if the user tries to send a certain request object to the driver by a call to the corresponding image request function.
- Since
- 1.10.31
◆ DEV_REQUEST_BUFFER_INVALID
| DEV_REQUEST_BUFFER_INVALID = lib_mvIMPACT_acquire.DEV_REQUEST_BUFFER_INVALID |
A request has been configured to use a user supplied buffer, but the buffer pointer associated with the request is invalid.
- Since
- 1.10.31
◆ DEV_REQUEST_BUFFER_MISALIGNED
| DEV_REQUEST_BUFFER_MISALIGNED = lib_mvIMPACT_acquire.DEV_REQUEST_BUFFER_MISALIGNED |
A request has been configured to use a user supplied buffer, but the buffer pointer associated with the request has an incorrect alignment.
Certain devices need aligned memory to perform efficiently thus when a user supplied buffer shall be used to capture data into this buffer must follow these alignment constraints
- Since
- 1.10.31
◆ DEV_REQUEST_CANT_BE_UNLOCKED
| DEV_REQUEST_CANT_BE_UNLOCKED = lib_mvIMPACT_acquire.DEV_REQUEST_CANT_BE_UNLOCKED |
The unlock for a mvIMPACT.acquire.Request object failed.
This might happen, if the mvIMPACT.acquire.Request is not locked at the time of calling the unlock function. It either has been unlocked by the user already or this request has never been locked as the request so far has not been used to capture image data into its buffer. Another reason for this error might be that the user tries to unlock a request that is currently processed by the device driver.
◆ DEV_SENSOR_TYPE_ERROR
| DEV_SENSOR_TYPE_ERROR = lib_mvIMPACT_acquire.DEV_SENSOR_TYPE_ERROR |
There is no sensor found or the found sensor type is wrong or not supported.
◆ DEV_UNKNOWN_ERROR
| DEV_UNKNOWN_ERROR = lib_mvIMPACT_acquire.DEV_UNKNOWN_ERROR |
An unknown error occurred while processing a user called driver function.
◆ DEV_UNSUPPORTED_PARAMETER
| DEV_UNSUPPORTED_PARAMETER = lib_mvIMPACT_acquire.DEV_UNSUPPORTED_PARAMETER |
The user tried to get/set a parameter, which is not supported by this device.
◆ DEV_WAIT_FOR_REQUEST_FAILED
| DEV_WAIT_FOR_REQUEST_FAILED = lib_mvIMPACT_acquire.DEV_WAIT_FOR_REQUEST_FAILED |
The wait for a request failed.
This might have several reasons:
• The user waited for an image, but no image has been requested before.
• The user waited for a requested image, but the image is still not ready(e.g. because of a short timeout and a long exposure time).
• A triggered image has been requested but no trigger signal has been detected within the wait period.
• A plug and play device(e.g. an USB device) has been unplugged and therefore can't deliver images anymore. In this case the 'state' property should be checked to find out if the device is still present or not.
◆ DEV_WRONG_INPUT_PARAM_COUNT
| DEV_WRONG_INPUT_PARAM_COUNT = lib_mvIMPACT_acquire.DEV_WRONG_INPUT_PARAM_COUNT |
A function has been called with an invalid number of input parameters.
◆ digioIgnore
| digioIgnore = lib_mvIMPACT_acquire.digioIgnore |
Digital Input is in 'ignore' state.
◆ digioKeep
| digioKeep = lib_mvIMPACT_acquire.digioKeep |
Digital Output is kept in unchanged state.
◆ digioOff
| digioOff = lib_mvIMPACT_acquire.digioOff |
Digital I/O is in 'logic 0' state.
◆ digioOn
| digioOn = lib_mvIMPACT_acquire.digioOn |
Digital I/O is in 'logic 1' state.
◆ dilDeviceSpecific
| dilDeviceSpecific = lib_mvIMPACT_acquire.dilDeviceSpecific |
A device specific interface shall be used(deprecated for all GenICam™ compliant devices).
For most devices supported by this SDK this will be the only interface layout available. In this interface layout also most of the features will have the same name and location for every device even if a device is operated using another device driver. However this interface layout requires the driver to have detailed information about the underlying hardware, thus it will not be available for any third party hardware which might be usable with a certain device driver.
In contrast to the other interface layouts, this layout will use a buffered property approach. This means that consecutive buffers can be requested each using defined but different settings. At the time of requesting a buffer, the driver will internally store the current property settings and will re-program the hardware later at the time of processing this request if the current settings differ from the settings that shall be used for this request.
- Deprecated
- This interface layout has been declared deprecated for GenICam™ compliant devices(mvBlueCOUGAR-S, mvBlueCOUGAR-X and mvBlueCOUGAR-XD). For these products please use mvIMPACT.acquire.dilGenICam instead. Newer devices like the mvBlueFOX3 will not support this interface layout at all.
◆ dilGenICam
| dilGenICam = lib_mvIMPACT_acquire.dilGenICam |
A GenICam™ like interface layout shall be used.
This interface layout will be available when a device is (or claims to be) compliant with a the GenICam™ standard, thus provides a GenICam™ compliant XML interface description. This also applies for third party devices, which can be used with the GenICam™ GenTL Producer of Impact Acquire.
In this interface layout property value changes will always have immediate effect, thus when changing the exposure time directly after requesting a buffer this buffer might be captured with the new exposure time already depending on the time the buffer request is actually be processed.
- Note
- This interface layout will allow to access third party devices as well.
◆ diommFrequency_Hz_100ms
| diommFrequency_Hz_100ms = lib_mvIMPACT_acquire.diommFrequency_Hz_100ms |
Measure frequency with a 100 ms gate time.
◆ diommFrequency_Hz_10ms
| diommFrequency_Hz_10ms = lib_mvIMPACT_acquire.diommFrequency_Hz_10ms |
Measure frequency with a 10 ms gate time.
◆ diomsInput0
| diomsInput0 = lib_mvIMPACT_acquire.diomsInput0 |
Measurement will be done on digital input 0.
◆ diomsInput1
| diomsInput1 = lib_mvIMPACT_acquire.diomsInput1 |
Measurement will be done on digital input 1.
◆ diomsInput2
| diomsInput2 = lib_mvIMPACT_acquire.diomsInput2 |
Measurement will be done on digital input 2.
◆ diomsInput3
| diomsInput3 = lib_mvIMPACT_acquire.diomsInput3 |
Measurement will be done on digital input 3.
◆ ditAfterDigOutSignals
| ditAfterDigOutSignals = lib_mvIMPACT_acquire.ditAfterDigOutSignals |
Acquisition starts after all defined signals have been generated on the digital outputs.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ ditImmediately
| ditImmediately = lib_mvIMPACT_acquire.ditImmediately |
Acquisition starts with trigger event as fast as possible.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dlsAuto
| dlsAuto = lib_mvIMPACT_acquire.dlsAuto |
Tries to load settings automatically following an internal procedure.
The load cycle at initialization time is like this:
Under Linux® the current directory will be searched for files named <serialNumber>.xml, <productString>.xml and <familyString.xml> while under Windows® the registry will be searched for keys with these names. This only happens once (when the device is opened)
◆ dlsNoLoad
| dlsNoLoad = lib_mvIMPACT_acquire.dlsNoLoad |
No stored settings will be loaded at start-up.
The device will be initialized with the drivers default values.
◆ dltCameraDescriptions
| dltCameraDescriptions = lib_mvIMPACT_acquire.dltCameraDescriptions |
Specifies the driver interface list providing access to the recognized camera description lists.
Within this list all recognized camera descriptions can be found, each forming a sub list containing the properties describing the camera.
- Note
- This feature is only available for frame grabber devices currently.
◆ dltDeviceSpecificData
| dltDeviceSpecificData = lib_mvIMPACT_acquire.dltDeviceSpecificData |
Specifies the driver interface list providing access to the device specific settings lists.
- Note
- This feature currently is only available for frame grabber devices.
◆ dltImageMemoryManager
| dltImageMemoryManager = lib_mvIMPACT_acquire.dltImageMemoryManager |
Specifies the driver interface list providing access to the devices memory manager list.
- Note
- This feature currently is only available for frame grabber devices.
This list will contain properties and lists providing access to settings related to the memory handling used by the device. E.g. the buffer size for individual DMA blocks can be configured here.
- Note
- Properties in this list should only be modified by advanced users.
◆ dltInfo
| dltInfo = lib_mvIMPACT_acquire.dltInfo |
Specifies the driver interfaces list containing general information.
This e.g. can be properties containing the driver version, the current state of the device and stuff like that.
◆ dltIOSubSystem
| dltIOSubSystem = lib_mvIMPACT_acquire.dltIOSubSystem |
Specifies the driver interface list containing properties to work with any kind of I/O pin belonging to that device.
Here properties addressing the digital inputs and outputs and other I/O related properties can be found.
◆ dltLast
| dltLast = lib_mvIMPACT_acquire.dltLast |
Defines the last entry in this enumeration.
This is always equal to the last 'real' enum value.
◆ dltPseudoLast
| dltPseudoLast = lib_mvIMPACT_acquire.dltPseudoLast |
◆ dltRequest
| dltRequest = lib_mvIMPACT_acquire.dltRequest |
Specifies the list of driver owned image request objects.
◆ dltRequestCtrl
| dltRequestCtrl = lib_mvIMPACT_acquire.dltRequestCtrl |
Specifies a certain image request control.
An additional string defines the name of the setting to look for.
◆ dltRTCtr
| dltRTCtr = lib_mvIMPACT_acquire.dltRTCtr |
Specifies the driver interface list providing access to the drivers Hardware Real-Time Controller (HRTC).
Here properties to control the behaviour of the HRTCs can be found.
- Note
- This feature might not be available for every device.
◆ dltSetting
| dltSetting = lib_mvIMPACT_acquire.dltSetting |
Specifies a certain setting.
An additional string defines the name of the setting to look for.
◆ dltStatistics
| dltStatistics = lib_mvIMPACT_acquire.dltStatistics |
Specifies the driver interface list containing statistical information.
This list e.g. might contain the current frame rate, the total number of images captured, etc.
◆ dltSystemSettings
| dltSystemSettings = lib_mvIMPACT_acquire.dltSystemSettings |
Specifies the driver interface list containing properties, which influence the overall operation of the device.
This list e.g. might contain the priority of the drivers internal worker thread, the number of request objects the driver shall work with, etc.
◆ dltUndefined
| dltUndefined = lib_mvIMPACT_acquire.dltUndefined |
A placeholder for an undefined list type.
◆ DM_DDrawOverlay
| DM_DDrawOverlay = lib_mvIMPACT_acquire.DM_DDrawOverlay |
DirectDraw® mode.
This mode will use DirectDraw® for displaying the image.
In this mode, the bitmap rectangle will always be scaled to fit into the display rectangle.
◆ DM_Default
| DM_Default = lib_mvIMPACT_acquire.DM_Default |
The default display mode.
This display mode is capable of scaling the image. Scaling however will result in additional CPU load.
In this mode, the bitmap rectangle will always be scaled to fit into the display rectangle.
In this mode(and in this mode only) overlay callbacks will be executed.
◆ DM_Fastest
| DM_Fastest = lib_mvIMPACT_acquire.DM_Fastest |
The fastest display mode.
In this mode there will be no scaling and no overlay callbacks but it will operate with the lowest possible CPU load.
◆ DM_FullScreen
| DM_FullScreen = lib_mvIMPACT_acquire.DM_FullScreen |
Fullscreen (Exclusive) DirectDraw® mode.
This mode will use DirectDraw® exclusive mode for displaying the image.
In this mode, the bitmap rectangle will always be scaled to fit into the display rectangle.
◆ DMR_ACQUISITION_ENGINE_BUSY
| DMR_ACQUISITION_ENGINE_BUSY = lib_mvIMPACT_acquire.DMR_ACQUISITION_ENGINE_BUSY |
An error returned when the user application attempts to start the acquisition engine at a time, where it is already running.
- Since
- 2.5.3
◆ DMR_BUSY
| DMR_BUSY = lib_mvIMPACT_acquire.DMR_BUSY |
An error returned when the user application attempts to perform any operation that currently for any reason cannot be started because something else already running.
The log-output will provide additional information.
- Since
- 2.32.0
◆ DMR_CAMERA_DESCRIPTION_INVALID
| DMR_CAMERA_DESCRIPTION_INVALID = lib_mvIMPACT_acquire.DMR_CAMERA_DESCRIPTION_INVALID |
A function call was associated with a camera description, that is invalid.
One possible reason might be, that the camera description has been deleted(driver closed?).
- Since
- 1.5.0
◆ DMR_CAMERA_DESCRIPTION_INVALID_PARAMETER
| DMR_CAMERA_DESCRIPTION_INVALID_PARAMETER = lib_mvIMPACT_acquire.DMR_CAMERA_DESCRIPTION_INVALID_PARAMETER |
One or more of the camera descriptions parameters are invalid for the grabber it is used with.
There are multiple reasons for this error code. Detailed information can be found in the *.log-file.
POSSIBLE CAUSES:
• The TapsXGeometry or TapsYGeometry parameter of the selected camera description cannot be used with a user defined AOI.
• A scan standard has been selected, that is not supported by this device.
• An invalid scan rate has been selected.
• ...
This error code will be returned by frame grabbers only.
- Since
- 1.10.57
◆ DMR_DEV_CANNOT_OPEN
| DMR_DEV_CANNOT_OPEN = lib_mvIMPACT_acquire.DMR_DEV_CANNOT_OPEN |
The specified device couldn't be initialized.
◆ DMR_DEV_NOT_FOUND
| DMR_DEV_NOT_FOUND = lib_mvIMPACT_acquire.DMR_DEV_NOT_FOUND |
The specified device can't be found.
This error occurs either if an invalid device ID has been passed to the device manager or if the caller tried to close a device which currently isn't initialized.
◆ DMR_DEV_REQUEST_CREATION_FAILED
| DMR_DEV_REQUEST_CREATION_FAILED = lib_mvIMPACT_acquire.DMR_DEV_REQUEST_CREATION_FAILED |
A request object couldn't be created.
The creation of a request object failed. This might e.g. happen, if the system runs extremely low on memory.
◆ DMR_DEV_REQUEST_QUEUE_EMPTY
| DMR_DEV_REQUEST_QUEUE_EMPTY = lib_mvIMPACT_acquire.DMR_DEV_REQUEST_QUEUE_EMPTY |
The devices request queue is empty.
This error e.g. occurs if the user waits for an image request to become available at a result queue without having send an image request to the device before.
It might also arise when trying to trigger an image with a software trigger mechanism before the acquisition engine has been completely started. In this case a small delay and then again calling the software trigger function will succeed.
◆ DMR_DRV_ALREADY_IN_USE
| DMR_DRV_ALREADY_IN_USE = lib_mvIMPACT_acquire.DMR_DRV_ALREADY_IN_USE |
The device is already in use.
This error e.g. will occur if this or another process has initialized this device already and an application tries to open the device once more or if a certain resource is available only once but shall be used twice.
◆ DMR_DRV_CANNOT_OPEN
| DMR_DRV_CANNOT_OPEN = lib_mvIMPACT_acquire.DMR_DRV_CANNOT_OPEN |
A device could not be initialized.
In this case the log-file will contain detailed information about the source of the problem.
◆ DMR_EXECUTION_FAILED
| DMR_EXECUTION_FAILED = lib_mvIMPACT_acquire.DMR_EXECUTION_FAILED |
The execution of a method object or reading/writing to a feature failed.
More information can be found in the log-file.
- Since
- 1.9.0
◆ DMR_EXECUTION_PROHIBITED
| DMR_EXECUTION_PROHIBITED = lib_mvIMPACT_acquire.DMR_EXECUTION_PROHIBITED |
The user is not permitted to perform the requested operation.
This e.g. might happen if the user tried to delete user data without specifying the required password.
◆ DMR_EXPORTED_SYMBOL_NOT_FOUND
| DMR_EXPORTED_SYMBOL_NOT_FOUND = lib_mvIMPACT_acquire.DMR_EXPORTED_SYMBOL_NOT_FOUND |
One or more symbols needed in a detected driver library couldn't be resolved.
In most cases this is an error handled internally. So the user will not receive this error code as a result of a call to an API function. However when the user tries to get access to an IMPACT buffer type while the needed IMPACT Base libraries are not installed on the target system this error code also might be returned to the user.
◆ DMR_FEATURE_NOT_AVAILABLE
| DMR_FEATURE_NOT_AVAILABLE = lib_mvIMPACT_acquire.DMR_FEATURE_NOT_AVAILABLE |
The feature in question is (currently) not available for this device or driver.
This might be because another feature currently blocks the one in question from being accessible. More information can be found in the *.log-file or the debug output.
◆ DMR_FILE_ACCESS_ERROR
| DMR_FILE_ACCESS_ERROR = lib_mvIMPACT_acquire.DMR_FILE_ACCESS_ERROR |
A general error returned whenever there has been a problem with accessing a file.
There can be multiple reasons for this error and a detailed error message will be sent to the log-output whenever this error code is returned.
POSSIBLE CAUSES:
• The driver tried to modify a file, for which it has no write access.
• The driver tried to read from a file, for which it has no read access.
• ...
- Since
- 1.10.87
◆ DMR_FILE_NOT_FOUND
| DMR_FILE_NOT_FOUND = lib_mvIMPACT_acquire.DMR_FILE_NOT_FOUND |
The specified file can't be found.
This might e.g. happen if the current working directory doesn't contain the file specified.
◆ DMR_FUNCTION_NOT_IMPLEMENTED
| DMR_FUNCTION_NOT_IMPLEMENTED = lib_mvIMPACT_acquire.DMR_FUNCTION_NOT_IMPLEMENTED |
A called function or accessed feature is not available for this device.
◆ DMR_INIT_FAILED
| DMR_INIT_FAILED = lib_mvIMPACT_acquire.DMR_INIT_FAILED |
The device manager couldn't be initialized.
This is an internal error.
◆ DMR_INPUT_BUFFER_TOO_SMALL
| DMR_INPUT_BUFFER_TOO_SMALL = lib_mvIMPACT_acquire.DMR_INPUT_BUFFER_TOO_SMALL |
The user allocated input buffer is too small to accommodate the result.
◆ DMR_INTERNAL_ERROR
| DMR_INTERNAL_ERROR = lib_mvIMPACT_acquire.DMR_INTERNAL_ERROR |
Some kind of internal error occurred.
More information can be found in the *.log-file or the debug output.
◆ DMR_INVALID_LICENCE
| DMR_INVALID_LICENCE = lib_mvIMPACT_acquire.DMR_INVALID_LICENCE |
The licence doesn't match the device it has been assigned to.
When e.g. upgrading a device feature each licence file is bound to a certain device. If the device this file has been assigned to has a different serial number then the one used to create the licence this error will occur.
◆ DMR_INVALID_PARAMETER
| DMR_INVALID_PARAMETER = lib_mvIMPACT_acquire.DMR_INVALID_PARAMETER |
An invalid parameter has been passed to a function.
This might e.g. happen if a function requiring a pointer to a structure has been passed an unassigned pointer or if a value has been passed, that is either too large or too small in that context.
◆ DMR_INVALID_QUEUE_SELECTION
| DMR_INVALID_QUEUE_SELECTION = lib_mvIMPACT_acquire.DMR_INVALID_QUEUE_SELECTION |
An error returned when the user application attempts to operate on an invalid queue.
- Since
- 1.11.0
◆ DMR_LAST_VALID_ERROR_CODE
| DMR_LAST_VALID_ERROR_CODE = lib_mvIMPACT_acquire.DMR_LAST_VALID_ERROR_CODE |
Defines the last valid error code value for device and device manager related errors.
◆ DMR_LIBRARY_NOT_FOUND
| DMR_LIBRARY_NOT_FOUND = lib_mvIMPACT_acquire.DMR_LIBRARY_NOT_FOUND |
One or more needed libraries are not installed on the system.
◆ DMR_NEWER_LIBRARY_REQUIRED
| DMR_NEWER_LIBRARY_REQUIRED = lib_mvIMPACT_acquire.DMR_NEWER_LIBRARY_REQUIRED |
A suitable driver library to work with the device manager has been detected, but it is too old to work with this version of the mvDeviceManager library.
This might happen if two different drivers have been installed on the target system and one introduces a newer version of the device manager that is not compatible with the older driver installed on the system. In this case this error message will be written into the log-file together with the name of the library that is considered to be too old.
The latest drivers will always be available online under https://www.balluff.com. There will always be an updated version of the library considered to be too old for download from here.
- Since
- 1.6.6
◆ DMR_NO_ERROR
| DMR_NO_ERROR = lib_mvIMPACT_acquire.DMR_NO_ERROR |
The function call was executed successfully.
◆ DMR_NOT_INITIALIZED
| DMR_NOT_INITIALIZED = lib_mvIMPACT_acquire.DMR_NOT_INITIALIZED |
The device manager or another module hasn't been initialized properly.
This error occurs if the user tries e.g. to close the device manager without having initialized it before or if a library used internally or a module or device associated with that library has not been initialized properly or if
◆ DMR_OUT_OF_MEMORY
| DMR_OUT_OF_MEMORY = lib_mvIMPACT_acquire.DMR_OUT_OF_MEMORY |
An error returned when for any reason internal resources (memory, handles, ...) cannot be allocated.
The log-output will provide additional information.
- Since
- 2.32.0
◆ DMR_PRELOAD_CHECK_FAILED
| DMR_PRELOAD_CHECK_FAILED = lib_mvIMPACT_acquire.DMR_PRELOAD_CHECK_FAILED |
A pre-load condition for loading a device driver failed.
Certain device drivers may depend on certain changes applied to the system in order to operate correctly. E.g. a device driver might need a certain environment variable to exist. When the device manager tries to load a device driver it performs some basic checks to detect problems like this. When one of these checks fails the device manager will not try to load the device driver and an error message will be written to the selected log outputs.
- Since
- 1.10.52
◆ DMR_TIMEOUT
| DMR_TIMEOUT = lib_mvIMPACT_acquire.DMR_TIMEOUT |
A general timeout occurred.
This is the typical result of functions that wait for some condition to be met with a timeout among their parameters.
More information can be found in the *.log-file or the debug output.
- Since
- 1.7.2
◆ DMR_WAIT_ABANDONED
| DMR_WAIT_ABANDONED = lib_mvIMPACT_acquire.DMR_WAIT_ABANDONED |
A wait operation has been aborted.
This e.g. might occur if the user waited for some message to be returned by the driver and the device driver has been closed within another thread. In order to inform the user that this waiting operation terminated in an unusual wait, mvIMPACT.acquire.DMR_WAIT_ABANDONED will be returned then.
- Since
- 1.7.2
◆ docmRTC
| docmRTC = lib_mvIMPACT_acquire.docmRTC |
The digital output signal is generated by a Real Time Controller that is part of the used hardware device.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ docmSoftware
| docmSoftware = lib_mvIMPACT_acquire.docmSoftware |
The digital output signal is generated by the on-board processor.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dpfm3x1Average
| dpfm3x1Average = lib_mvIMPACT_acquire.dpfm3x1Average |
The filter is active, detected defective pixels will be replaced with the average value from the left and right neighbor pixel.
◆ dpfm3x3Median
| dpfm3x3Median = lib_mvIMPACT_acquire.dpfm3x3Median |
The filter is active, detected defective pixels will be replaced with the median value calculated from the nearest neighbors (3x3).
◆ dpfmCalibrateColdPixel
| dpfmCalibrateColdPixel = lib_mvIMPACT_acquire.dpfmCalibrateColdPixel |
Detect defective cold pixels within the next frame captured.
These are pixels that produce a lower read out code than the average when the sensor is exposed to light.
◆ dpfmCalibrateHotAndColdPixel
| dpfmCalibrateHotAndColdPixel = lib_mvIMPACT_acquire.dpfmCalibrateHotAndColdPixel |
Detect defective hot and cold pixels within the next frame captured.
These are pixels that produce either a higher or a lower read out code than the average when the sensor is exposed to light. This effectively combines mvIMPACT.acquire.dpfmCalibrateColdPixel and mvIMPACT.acquire.dpfmCalibrateHotPixel
- Since
- 2.31.0
◆ dpfmCalibrateHotPixel
| dpfmCalibrateHotPixel = lib_mvIMPACT_acquire.dpfmCalibrateHotPixel |
Detect defective hot pixels within the next frame captured.
These are pixels that produce a higher read out code than the average when the sensor is exposed to light.
- Since
- 2.31.0
◆ dpfmCalibrateLeakyPixel
| dpfmCalibrateLeakyPixel = lib_mvIMPACT_acquire.dpfmCalibrateLeakyPixel |
Detect defective leaky pixels within the next frame captured.
These are pixels that produce a higher read out value than the average when the sensor is not exposed.
◆ dpfmOff
| dpfmOff = lib_mvIMPACT_acquire.dpfmOff |
This filter is switched off.
◆ dpfmReplaceDefectivePixelAfter3x3Filter
| dpfmReplaceDefectivePixelAfter3x3Filter = lib_mvIMPACT_acquire.dpfmReplaceDefectivePixelAfter3x3Filter |
The filter is active, detected defective pixel will be replaced and treated as being fed into a 3x3 de-Bayer algorithm before reaching the filter.
This is a rather special mode that only makes sense for very specific use cases:
- Defective pixel data has been obtained by the filter from a device that did carry this data within it's non-volatile memory, the device itself does NOT provide a defective pixel replacement functionality and the device is operated in RGB or YUV mode using a 3 by 3 filter kernel. This will introduce artifacts in the pixels surrounding the defective pixel then and to compensate that a special handling is needed.
- To reduce CPU load another use case might be to detect defective pixels on a device in Bayer mode using the defective pixel filter of this SDK and then switch the device into RGB mode if supported. Again this is only needed if the device itself does not offer a defective pixel compensation.
A far better way to tackle this of course would be (in that order):
- Compensate the defective pixels on the device BEFORE feeding the data into the Bayer filter
- Switch the device to a Bayer format, compensate the defective pixels on the host and THEN feed the data into a host-based Bayer filter
- Select a device with less defective pixels if these are causing harm to the application
This mode will only operate on packed RGB or packed YUV444 data! It will assume that when given a pixel p all the surrounding pixels marked with a d in the following section need to be replaced as well(- stands for other pixels NOT affected by the replacement operation):
- Since
- 2.33.0
◆ dpfmResetCalibration
| dpfmResetCalibration = lib_mvIMPACT_acquire.dpfmResetCalibration |
reset the calibration, delete all internal lists.
◆ dpmOff
| dpmOff = lib_mvIMPACT_acquire.dpmOff |
This device is switched off.
This might save a considerable amount of energy if the device isn't needed for a certain amount of time.
◆ dpmOn
| dpmOn = lib_mvIMPACT_acquire.dpmOn |
This device is switched on.
◆ dsAbsent
| dsAbsent = lib_mvIMPACT_acquire.dsAbsent |
The mvIMPACT.acquire.Device has been unplugged.
The mvIMPACT.acquire.Device has present been since the mvIMPACT.acquire.DeviceManager has been initialized, but has been unplugged now and the driver has detected the unplugging of the device. Automatic detection of unplugging events is only possible for devices that support plug and play, other device drivers will only check if a device is still present if an application triggered this check.
◆ dsInitializing
| dsInitializing = lib_mvIMPACT_acquire.dsInitializing |
The mvIMPACT.acquire.Device is connected and is currently initializing.
◆ dsNone
| dsNone = lib_mvIMPACT_acquire.dsNone |
A dummy value to delete a mask or signal configuration.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsomInterlaced
| dsomInterlaced = lib_mvIMPACT_acquire.dsomInterlaced |
A interlaced HD-out/VD-out signal is generated.
◆ dsomNonInterlaced
| dsomNonInterlaced = lib_mvIMPACT_acquire.dsomNonInterlaced |
A non interlaced HD-out/VD-out signal is generated.
◆ dsomOff
| dsomOff = lib_mvIMPACT_acquire.dsomOff |
Sync.
signals off.
◆ dsoseFrame
| dsoseFrame = lib_mvIMPACT_acquire.dsoseFrame |
The signal generation on the digital outputs starts with the next frame start signal ( e.g.: VSync ).
◆ dsoseFrameAfterTrigger
| dsoseFrameAfterTrigger = lib_mvIMPACT_acquire.dsoseFrameAfterTrigger |
The signal generation on the digital outputs starts with next frame signal after the event defined in setting->camera->trigger.
◆ dsoseFVALPassThrough
| dsoseFVALPassThrough = lib_mvIMPACT_acquire.dsoseFVALPassThrough |
The FVAL - signal is passed to the selected digital output.
CameraLink® only!!!
◆ dsoseFVALPassThroughInv
| dsoseFVALPassThroughInv = lib_mvIMPACT_acquire.dsoseFVALPassThroughInv |
The FVAL - signal is inverted and passed to the selected digital output.
CameraLink® only!!!
◆ dsoseFVALRisingEdge
| dsoseFVALRisingEdge = lib_mvIMPACT_acquire.dsoseFVALRisingEdge |
The signal generation on the digital outputs starts with the rising edge of FVAL - signal.
CameraLink® only!!!
◆ dsosePeriodically
| dsosePeriodically = lib_mvIMPACT_acquire.dsosePeriodically |
The signal generation on the digital outputs starts periodically.
CameraLink® only!!!
◆ dsoseSyncInFallingEdge
| dsoseSyncInFallingEdge = lib_mvIMPACT_acquire.dsoseSyncInFallingEdge |
The signal generation on the digital outputs starts with the falling edge of SyncIn - signal.
CameraLink® only!!!
◆ dsoseSyncInPassThrough
| dsoseSyncInPassThrough = lib_mvIMPACT_acquire.dsoseSyncInPassThrough |
The SyncIn - signal is passed to the selected digital output.
CameraLink® only!!!
◆ dsoseSyncInPassThroughInv
| dsoseSyncInPassThroughInv = lib_mvIMPACT_acquire.dsoseSyncInPassThroughInv |
The SyncIn - signal is inverted and passed to the selected digital output.
CameraLink® only!!!
◆ dsoseSyncInRisingEdge
| dsoseSyncInRisingEdge = lib_mvIMPACT_acquire.dsoseSyncInRisingEdge |
The signal generation on the digital outputs starts with the rising edge of SyncIn - signal.
CameraLink® only!!!
◆ dsoseTrigger
| dsoseTrigger = lib_mvIMPACT_acquire.dsoseTrigger |
The signal generation on the digital outputs starts with the event defined in setting->camera->trigger.
◆ dsoseTriggerInPassThrough
| dsoseTriggerInPassThrough = lib_mvIMPACT_acquire.dsoseTriggerInPassThrough |
The TriggerIn - signal is passed to the selected digital output.
CameraLink® only!!!
◆ dsoseTriggerInPassThroughInv
| dsoseTriggerInPassThroughInv = lib_mvIMPACT_acquire.dsoseTriggerInPassThroughInv |
The TriggerIn - signal is inverted and passed to the selected digital output.
CameraLink® only!!!
◆ dsPowerDown
| dsPowerDown = lib_mvIMPACT_acquire.dsPowerDown |
This device is present, but currently switched into a low power consumption mode.
◆ dsPresent
| dsPresent = lib_mvIMPACT_acquire.dsPresent |
The mvIMPACT.acquire.Device is currently connected and initialized.
◆ dsrmAuto
| dsrmAuto = lib_mvIMPACT_acquire.dsrmAuto |
Auto, scan rate of camera used.
◆ dsrmUser
| dsrmUser = lib_mvIMPACT_acquire.dsrmUser |
User, scan rate must be set manually.
◆ dsSignal1
| dsSignal1 = lib_mvIMPACT_acquire.dsSignal1 |
A constant for digital signal 1.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal10
| dsSignal10 = lib_mvIMPACT_acquire.dsSignal10 |
A constant for digital signal 10.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal11
| dsSignal11 = lib_mvIMPACT_acquire.dsSignal11 |
A constant for digital signal 11.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal12
| dsSignal12 = lib_mvIMPACT_acquire.dsSignal12 |
A constant for digital signal 12.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal13
| dsSignal13 = lib_mvIMPACT_acquire.dsSignal13 |
A constant for digital signal 13.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal14
| dsSignal14 = lib_mvIMPACT_acquire.dsSignal14 |
A constant for digital signal 14.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal15
| dsSignal15 = lib_mvIMPACT_acquire.dsSignal15 |
A constant for digital signal 15.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal16
| dsSignal16 = lib_mvIMPACT_acquire.dsSignal16 |
A constant for digital signal 16.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal2
| dsSignal2 = lib_mvIMPACT_acquire.dsSignal2 |
A constant for digital signal 2.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal3
| dsSignal3 = lib_mvIMPACT_acquire.dsSignal3 |
A constant for digital signal 3.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal4
| dsSignal4 = lib_mvIMPACT_acquire.dsSignal4 |
A constant for digital signal 4.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal5
| dsSignal5 = lib_mvIMPACT_acquire.dsSignal5 |
A constant for digital signal 5.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal6
| dsSignal6 = lib_mvIMPACT_acquire.dsSignal6 |
A constant for digital signal 6.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal7
| dsSignal7 = lib_mvIMPACT_acquire.dsSignal7 |
A constant for digital signal 7.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal8
| dsSignal8 = lib_mvIMPACT_acquire.dsSignal8 |
A constant for digital signal 8.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsSignal9
| dsSignal9 = lib_mvIMPACT_acquire.dsSignal9 |
A constant for digital signal 9.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ dsUnreachable
| dsUnreachable = lib_mvIMPACT_acquire.dsUnreachable |
This device is recognized, but can't be accessed currently.
This e.g. can be the case, if this is a device connected via a network and the device does not respond to one of the recognized network protocols or if another client is already connected to this device and the device does not support multiple clients.
◆ dtiAdvanced
| dtiAdvanced = lib_mvIMPACT_acquire.dtiAdvanced |
The advanced view on the trigger interface.
When this view on the interface is selected, all features offered by the device regarding the creation of trigger events will be visible. So more complex configurations are possible but more knowledge about the hardware is required as well.
◆ dtiStandard
| dtiStandard = lib_mvIMPACT_acquire.dtiStandard |
The standard trigger interface.
When this trigger interface is used, the configuration of an external trigger signal can be done very easy. However more complex scenarios might not be possible using this view on the trigger configuration.
◆ dtmFallingEdge
| dtmFallingEdge = lib_mvIMPACT_acquire.dtmFallingEdge |
Trigger on falling edge of an external signal.
◆ dtmLevelHigh
| dtmLevelHigh = lib_mvIMPACT_acquire.dtmLevelHigh |
Trigger valid as long as the level of the source signal is high.
◆ dtmLevelLow
| dtmLevelLow = lib_mvIMPACT_acquire.dtmLevelLow |
Trigger valid as long as the level of the source signal is low.
◆ dtmOff
| dtmOff = lib_mvIMPACT_acquire.dtmOff |
Trigger off.
◆ dtmOn
| dtmOn = lib_mvIMPACT_acquire.dtmOn |
Trigger on.
◆ dtmOnDemand
| dtmOnDemand = lib_mvIMPACT_acquire.dtmOnDemand |
Request simulates trigger.
◆ dtmPeriodically
| dtmPeriodically = lib_mvIMPACT_acquire.dtmPeriodically |
Timer is used to simulate trigger.
◆ dtmRisingEdge
| dtmRisingEdge = lib_mvIMPACT_acquire.dtmRisingEdge |
Trigger on rising edge of an external signal.
◆ dtmStartFallingStopRising
| dtmStartFallingStopRising = lib_mvIMPACT_acquire.dtmStartFallingStopRising |
Line scan mode: Acquisition starts with falling edge and stops with rising edge of trigger ( mvTITAN/mvGAMMA-CL only ).
◆ dtmStartRisingStopFalling
| dtmStartRisingStopFalling = lib_mvIMPACT_acquire.dtmStartRisingStopFalling |
Line scan mode: Acquisition starts with rising edge and stops with falling edge of trigger ( mvTITAN/mvGAMMA-CL only ).
◆ dtoOff
| dtoOff = lib_mvIMPACT_acquire.dtoOff |
No trigger overlap is permitted.
◆ dtoPreviousFrame
| dtoPreviousFrame = lib_mvIMPACT_acquire.dtoPreviousFrame |
Trigger is accepted at any time during the capture of the previous frame.
◆ dtoReadOut
| dtoReadOut = lib_mvIMPACT_acquire.dtoReadOut |
Trigger is accepted immediately after the exposure period.
◆ ecmAuto
| ecmAuto = lib_mvIMPACT_acquire.ecmAuto |
Clamp pulse starts at 80 % of ActiveVideoAoi/X.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ ecmUser
| ecmUser = lib_mvIMPACT_acquire.ecmUser |
The user can set the clamp start time in micro sec.
after the falling edge of the video signals' VSync.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ efmAuto
| efmAuto = lib_mvIMPACT_acquire.efmAuto |
Field gate starts at 1/3 of a line and ends at 2/3 of a line.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ efmUser
| efmUser = lib_mvIMPACT_acquire.efmUser |
FieldGateStart and FieldGateWidth can be set in pixels.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ END_OF_LIST
| END_OF_LIST = cvar.END_OF_LIST |
◆ ffBGR2BytePacked_V2
| ffBGR2BytePacked_V2 = lib_mvIMPACT_acquire.ffBGR2BytePacked_V2 |
Valid values for bits per pixel in this format: 30 (R=pix&0x3FF, G=(pix>>10)&0x3FF, B=(pix>>20)&3FF).
◆ ffBGR888xPacked
| ffBGR888xPacked = lib_mvIMPACT_acquire.ffBGR888xPacked |
Valid values for bits per pixel in this format: 15, 16, 24, 32; pData[0] points to the packed image data.
◆ ffcmBrightPreserving
| ffcmBrightPreserving = lib_mvIMPACT_acquire.ffcmBrightPreserving |
The flat field correction with clipping compensation is used.
This mode prevents clipping artifacts when overexposing the image, but may cause missing codes in the histogram and a brighter image.
◆ ffcmDefault
| ffcmDefault = lib_mvIMPACT_acquire.ffcmDefault |
The default flat field correction is used.
◆ fffmCalibrateFlatField
| fffmCalibrateFlatField = lib_mvIMPACT_acquire.fffmCalibrateFlatField |
The next selected number of images will be taken for calculating the flat field correction image.
In this mode after the correction image has been calculated the mode will automatically switch back to mvIMPACT.acquire.fffmOff
◆ fffmOff
| fffmOff = lib_mvIMPACT_acquire.fffmOff |
The filter is switched off.
◆ fffmOn
| fffmOn = lib_mvIMPACT_acquire.fffmOn |
The filter is switched on.
◆ fffmTransmitCorrectionImage
| fffmTransmitCorrectionImage = lib_mvIMPACT_acquire.fffmTransmitCorrectionImage |
In this mode whenever reaching this filter, the captured image will be replaced by the last correction image, that has been created as a result of the filter being calibrated.
- Since
- 2.5.9
◆ ffMono
| ffMono = lib_mvIMPACT_acquire.ffMono |
Valid values for bits per pixel in this format: 8, 10, 12, 14, 16, LSB aligned.
◆ ffMonoPacked_V1
| ffMonoPacked_V1 = lib_mvIMPACT_acquire.ffMonoPacked_V1 |
Valid values for bits per pixel in this format: 12, 8 MSB(1), 4 LSB(1) + 4 MSB(2), 8LSB(2).
- Since
- 2.5.0
◆ ffMonoPacked_V2
| ffMonoPacked_V2 = lib_mvIMPACT_acquire.ffMonoPacked_V2 |
Valid values for bits per pixel in this format: 12, 8 MSB(1), 4 LSBs(1+2), 8MSB(2).
◆ ffRaw
| ffRaw = lib_mvIMPACT_acquire.ffRaw |
Valid values for bits per pixel in this format: not used.
Raw buffer. Won't be displayed
- Since
- 2.46.0
◆ ffRGB2BytePacked
| ffRGB2BytePacked = lib_mvIMPACT_acquire.ffRGB2BytePacked |
Valid values for bits per pixel in this format: 30, 36, 42 or 48 10-16 bits per color component RGB packed data.
◆ ffRGB888xPacked
| ffRGB888xPacked = lib_mvIMPACT_acquire.ffRGB888xPacked |
Valid values for bits per pixel in this format: 15, 16, 24, 32; pData[0] points to the packed image data.
◆ ffRGB888xPlanar
| ffRGB888xPlanar = lib_mvIMPACT_acquire.ffRGB888xPlanar |
Valid values for bits per pixel in this format: not used, 8 bit per plane, pData[0] points to the Blue, pData[1] points to the Green, pData[2] points to the Red plane.
◆ ffUYV444
| ffUYV444 = lib_mvIMPACT_acquire.ffUYV444 |
Valid values for bits per pixel in this format: 24 or 48.
◆ ffUYVY
| ffUYVY = lib_mvIMPACT_acquire.ffUYVY |
Valid values for bits per pixel in this format: 16, 20, YUV422: 8-10 bit U | 8-10 bit Y | 8-10 bit V | 8-10 bit Y.
◆ ffYUV411_UYYVYY_Packed
| ffYUV411_UYYVYY_Packed = lib_mvIMPACT_acquire.ffYUV411_UYYVYY_Packed |
Valid values for bits per pixel in this format: not used, YUV411: 8 bit U | 8 bit Y1 | 8 bit Y2 | 8 bit V | 8 bit Y3 | 8 bit Y4.
- Since
- 2.13.0
◆ ffYUV422Planar
| ffYUV422Planar = lib_mvIMPACT_acquire.ffYUV422Planar |
Valid values for bits per pixel in this format: not used, YUV422 planar.
◆ ffYUV444
| ffYUV444 = lib_mvIMPACT_acquire.ffYUV444 |
Valid values for bits per pixel in this format: 48.
◆ ffYUY2
| ffYUY2 = lib_mvIMPACT_acquire.ffYUY2 |
Valid values for bits per pixel in this format: 16, 20, YUV422: 8-10 bit Y | 8-10 bit U | 8-10 bit Y | 8-10 bit V.
◆ fuaCancel
| fuaCancel = lib_mvIMPACT_acquire.fuaCancel |
Return this value to request the driver to terminate an ongoing firmware update as soon as possible.
◆ fuaContinue
| fuaContinue = lib_mvIMPACT_acquire.fuaContinue |
The default return value to tell the driver to continue processing the firmware update.
◆ fusErasingFlash
| fusErasingFlash = lib_mvIMPACT_acquire.fusErasingFlash |
Erasing the device's flash memory.
◆ fusErrorMessage
| fusErrorMessage = lib_mvIMPACT_acquire.fusErrorMessage |
A message wants to be sent.
◆ fusHardResetRequired
| fusHardResetRequired = lib_mvIMPACT_acquire.fusHardResetRequired |
An external hard reset is required.
◆ fusLoadingUserSets
| fusLoadingUserSets = lib_mvIMPACT_acquire.fusLoadingUserSets |
Loading user sets of the device.
◆ fusRebootingDevice
| fusRebootingDevice = lib_mvIMPACT_acquire.fusRebootingDevice |
Rebooting the device.
◆ fusSavingUserSets
| fusSavingUserSets = lib_mvIMPACT_acquire.fusSavingUserSets |
Saving user sets of the device.
◆ fusUnzippingFirmwareArchive
| fusUnzippingFirmwareArchive = lib_mvIMPACT_acquire.fusUnzippingFirmwareArchive |
Unzipping the .mvu file.
◆ fusUpdatingBootProgrammer
| fusUpdatingBootProgrammer = lib_mvIMPACT_acquire.fusUpdatingBootProgrammer |
Updating the boot programmer of the device.
◆ fusUploadingFirmware
| fusUploadingFirmware = lib_mvIMPACT_acquire.fusUploadingFirmware |
Uploading firmware into device memory.
◆ I2ComRead
| I2ComRead = lib_mvIMPACT_acquire.I2ComRead |
Selects I2C read access.
◆ I2ComWrite
| I2ComWrite = lib_mvIMPACT_acquire.I2ComWrite |
Selects I2C write access.
◆ I2CosFailure
| I2CosFailure = lib_mvIMPACT_acquire.I2CosFailure |
The last I2C operation did fail.
The log-file might contain additional information
◆ I2CosInvalidDeviceAddress
| I2CosInvalidDeviceAddress = lib_mvIMPACT_acquire.I2CosInvalidDeviceAddress |
During the execution of the last I2C operation an invalid device address was specified.
◆ I2CosInvalidDeviceSubAddress
| I2CosInvalidDeviceSubAddress = lib_mvIMPACT_acquire.I2CosInvalidDeviceSubAddress |
During the execution of the last I2C operation an invalid device sub-address was specified.
This can either be caused by an invalid address or by an invalid address width.
◆ I2CosNotEnoughData
| I2CosNotEnoughData = lib_mvIMPACT_acquire.I2CosNotEnoughData |
During the execution of the last I2C operation the amount of data requested or sent was too small.
◆ I2CosSuccess
| I2CosSuccess = lib_mvIMPACT_acquire.I2CosSuccess |
The last I2C operation was successful.
◆ I2CosTooMuchData
| I2CosTooMuchData = lib_mvIMPACT_acquire.I2CosTooMuchData |
During the execution of the last I2C operation too much data was either requested or sent.
◆ ibfNone
| ibfNone = lib_mvIMPACT_acquire.ibfNone |
A dummy constant to state that none of the flags shall be specified.
This flag can be used instead of writing code like this: TImpactBufferFlag(0) or static_cast<TImpactBufferFlag>(0).
◆ ibfRecycleBufHandle
| ibfRecycleBufHandle = lib_mvIMPACT_acquire.ibfRecycleBufHandle |
If an existing IPL_BUFHANDLE is passed to a function it will try to copy data in this buffer instead of freeing it.
This flag can be used to allow the continuous usage of the same mvIMPACT buffer. If this flag is NOT specified whenever a valid mvIMPACT buffer handle is passed to a function accepting this type of flags it might free the existing buffer and create a new one.
If this flag is specified and the new buffer doesn't match the existing one in terms of the number of bands, size, etc. the function will fail and return an error code. Thus this flag can be used to optimize performance if the buffer layout will remain constant during application runtime.
◆ ibfrmMono10_To_Mono10
| ibfrmMono10_To_Mono10 = lib_mvIMPACT_acquire.ibfrmMono10_To_Mono10 |
Attach or remove a mvIMPACT.acquire.TBayerMosaicParity attribute to a mvIMPACT.acquire.ibpfMono8 buffer OR change the existing Bayer attribute to a different value.
The new mvIMPACT.acquire.TBayerMosaicParity value for the buffer can be selected by the property FormatReinterpreterBayerMosaicParity.
◆ ibfrmMono10_To_RGB101010Packed
| ibfrmMono10_To_RGB101010Packed = lib_mvIMPACT_acquire.ibfrmMono10_To_RGB101010Packed |
Reinterpret mvIMPACT.acquire.ibpfMono10 as mvIMPACT.acquire.ibpfRGB101010Packed.
This will effectively divide the width by 3 but preserve the original line pitch.
◆ ibfrmMono12_To_Mono12
| ibfrmMono12_To_Mono12 = lib_mvIMPACT_acquire.ibfrmMono12_To_Mono12 |
Attach or remove a mvIMPACT.acquire.TBayerMosaicParity attribute to a mvIMPACT.acquire.ibpfMono8 buffer OR change the existing Bayer attribute to a different value.
The new mvIMPACT.acquire.TBayerMosaicParity value for the buffer can be selected by the property FormatReinterpreterBayerMosaicParity.
◆ ibfrmMono12_To_RGB121212Packed
| ibfrmMono12_To_RGB121212Packed = lib_mvIMPACT_acquire.ibfrmMono12_To_RGB121212Packed |
Reinterpret mvIMPACT.acquire.ibpfMono12 as mvIMPACT.acquire.ibpfRGB121212Packed.
This will effectively divide the width by 3 but preserve the original line pitch.
◆ ibfrmMono14_To_Mono14
| ibfrmMono14_To_Mono14 = lib_mvIMPACT_acquire.ibfrmMono14_To_Mono14 |
Attach or remove a mvIMPACT.acquire.TBayerMosaicParity attribute to a mvIMPACT.acquire.ibpfMono8 buffer OR change the existing Bayer attribute to a different value.
The new mvIMPACT.acquire.TBayerMosaicParity value for the buffer can be selected by the property FormatReinterpreterBayerMosaicParity.
◆ ibfrmMono14_To_RGB141414Packed
| ibfrmMono14_To_RGB141414Packed = lib_mvIMPACT_acquire.ibfrmMono14_To_RGB141414Packed |
Reinterpret mvIMPACT.acquire.ibpfMono14 as mvIMPACT.acquire.ibpfRGB141414Packed.
This will effectively divide the width by 3 but preserve the original line pitch.
◆ ibfrmMono16_To_Mono16
| ibfrmMono16_To_Mono16 = lib_mvIMPACT_acquire.ibfrmMono16_To_Mono16 |
Attach or remove a mvIMPACT.acquire.TBayerMosaicParity attribute to a mvIMPACT.acquire.ibpfMono8 buffer OR change the existing Bayer attribute to a different value.
The new mvIMPACT.acquire.TBayerMosaicParity value for the buffer can be selected by the property FormatReinterpreterBayerMosaicParity.
◆ ibfrmMono16_To_RGB161616Packed
| ibfrmMono16_To_RGB161616Packed = lib_mvIMPACT_acquire.ibfrmMono16_To_RGB161616Packed |
Reinterpret mvIMPACT.acquire.ibpfMono16 as mvIMPACT.acquire.ibpfRGB161616Packed.
This will effectively divide the width by 3 but preserve the original line pitch.
◆ ibfrmMono8_To_BGR888Packed
| ibfrmMono8_To_BGR888Packed = lib_mvIMPACT_acquire.ibfrmMono8_To_BGR888Packed |
Reinterpret mvIMPACT.acquire.ibpfMono8 as mvIMPACT.acquire.ibpfBGR888Packed.
This will effectively divide the width by 3 but preserve the original line pitch.
◆ ibfrmMono8_To_Mono8
| ibfrmMono8_To_Mono8 = lib_mvIMPACT_acquire.ibfrmMono8_To_Mono8 |
Attach or remove a mvIMPACT.acquire.TBayerMosaicParity attribute to a mvIMPACT.acquire.ibpfMono8 buffer OR change the existing Bayer attribute to a different value.
The new mvIMPACT.acquire.TBayerMosaicParity value for the buffer can be selected by the property FormatReinterpreterBayerMosaicParity.
◆ ibfrmMono8_To_RGB888Packed
| ibfrmMono8_To_RGB888Packed = lib_mvIMPACT_acquire.ibfrmMono8_To_RGB888Packed |
Reinterpret mvIMPACT.acquire.ibpfMono8 as mvIMPACT.acquire.ibpfRGB888Packed.
This will effectively divide the width by 3 but preserve the original line pitch.
◆ ibfUseRequestMemory
| ibfUseRequestMemory = lib_mvIMPACT_acquire.ibfUseRequestMemory |
If set no new memory will be allocated for the creation of the mvIMPACT buffer.
This way of creating the images is fast, but modifying the image data with an image processing function will always modify the image data associated with the underlying request object.
- Note
- Once the underlying request object has been unlocked, working with the image is no longer save when this flag was set during creation of the mvIMPACT buffer, as the memory might be freed by the driver. If you want to keep the created image do NOT specify this flag during creation.
- Whenever a new image is acquired from a device the device might be using the memory already associated with another image thus you might end up with to IMPACT images that internally reference the same buffer. However a large DMA memory will (at least twice the size of one image) will allow to work with a double buffering scheme.
◆ ibpfAuto
| ibpfAuto = lib_mvIMPACT_acquire.ibpfAuto |
The framework will decide which format will be used.
◆ ibpfBGR101010Packed_V2
| ibpfBGR101010Packed_V2 = lib_mvIMPACT_acquire.ibpfBGR101010Packed_V2 |
A three channel 10 bit per color component RGB packed format occupying 32 bit per pixel.
(PFNC name: RGB10p32)
This format will use 4 bytes to store one 10 bit per color component RGB pixel. The following memory layout is used for each pixel:
The last 2 bit of each 32 bit bit may contain undefined data.
◆ ibpfBGR888Packed
| ibpfBGR888Packed = lib_mvIMPACT_acquire.ibpfBGR888Packed |
A three channel interleaved RGB format with 24 bit per pixel.
(PFNC name: RGB8)
This is an interleaved pixel format suitable for most processing functions. Most blit/display function however will expect ibpfRGB888Packed. The data is stored pixel-wise:
So the first byte in memory is the first pixels red component. ImageBuffer.vpData will therefore point to R(1) when using a byte pointer.
◆ ibpfMono10
| ibpfMono10 = lib_mvIMPACT_acquire.ibpfMono10 |
A single channel 10 bit per pixel format.
(PFNC name: Mono10)
Each pixel in this format consumes 2 bytes of memory. The lower 10 bit of this 2 bytes will contain valid data.
◆ ibpfMono12
| ibpfMono12 = lib_mvIMPACT_acquire.ibpfMono12 |
A single channel 12 bit per pixel format.
(PFNC name: Mono12)
Each pixel in this format consumes 2 bytes of memory. The lower 12 bit of this 2 bytes will contain valid data.
◆ ibpfMono12Packed_V1
| ibpfMono12Packed_V1 = lib_mvIMPACT_acquire.ibpfMono12Packed_V1 |
A single channel 12 bit per pixel packed format occupying 12 bit per pixel.
(PFNC name: Mono12p)
This format will use 3 bytes to store 2 12 bit pixel. Every 3 bytes will use the following layout in memory:
- Note
- When the width is not divisible by 2 the line pitch of a buffer can't be used to calculate line start offsets in a buffer! In that case something like this can be used to access a certain pixel (pseudo code assuming 'pointerToStartOfTheBuffer' is a 'byte pointer'):
- Since
- 2.5.0
◆ ibpfMono12Packed_V2
| ibpfMono12Packed_V2 = lib_mvIMPACT_acquire.ibpfMono12Packed_V2 |
A single channel 12 bit per pixel packed format occupying 12 bit per pixel.
(PFNC name: Mono12Packed)
This format will use 3 bytes to store 2 12 bit pixel. Every 3 bytes will use the following layout in memory:
- Note
- When the width is not divisible by 2 the line pitch of a buffer can't be used to calculate line start offsets in a buffer! In that case something like this can be used to access a certain pixel (pseudo code assuming 'pointerToStartOfTheBuffer' is a 'byte pointer'):
◆ ibpfMono14
| ibpfMono14 = lib_mvIMPACT_acquire.ibpfMono14 |
A single channel 14 bit per pixel format.
(PFNC name: Mono14)
Each pixel in this format consumes 2 bytes of memory. The lower 14 bit of this 2 bytes will contain valid data.
◆ ibpfMono16
| ibpfMono16 = lib_mvIMPACT_acquire.ibpfMono16 |
A single channel 16 bit per pixel format.
(PFNC name: Mono16)
◆ ibpfMono32
| ibpfMono32 = lib_mvIMPACT_acquire.ibpfMono32 |
A single channel 32 bit per pixel format.
(PFNC name: Mono32)
◆ ibpfMono8
| ibpfMono8 = lib_mvIMPACT_acquire.ibpfMono8 |
A single channel 8 bit per pixel format.
(PFNC name: Mono8)
◆ ibpfRaw
| ibpfRaw = lib_mvIMPACT_acquire.ibpfRaw |
An unprocessed block of data.
◆ ibpfRGB101010Packed
| ibpfRGB101010Packed = lib_mvIMPACT_acquire.ibpfRGB101010Packed |
A three channel interleaved RGB image occupying 48 bit with 30 bit of usable data per pixel.
(PFNC name: BGR10)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned, thus the 6 MSB of each 16 bit will not contain valid data.
So the first 2 bytes in memory are the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a 16 bit pointer.
◆ ibpfRGB121212Packed
| ibpfRGB121212Packed = lib_mvIMPACT_acquire.ibpfRGB121212Packed |
A three channel interleaved RGB image occupying 48 bit with 36 bit of usable data per pixel.
(PFNC name: BGR12)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned, thus the 4 MSB of each 16 bit will not contain valid data.
So the first 2 bytes in memory are the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a 16 bit pointer.
◆ ibpfRGB141414Packed
| ibpfRGB141414Packed = lib_mvIMPACT_acquire.ibpfRGB141414Packed |
A three channel interleaved RGB image occupying 48 bit with 42 bit of usable data per pixel.
(PFNC name: BGR14)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned, thus the 2 MSB of each 16 bit will not contain valid data.
So the first 2 bytes in memory are the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a 16 bit pointer.
◆ ibpfRGB161616Packed
| ibpfRGB161616Packed = lib_mvIMPACT_acquire.ibpfRGB161616Packed |
A three channel interleaved RGB image occupying 48 bit per pixel.
(PFNC name: BGR16)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned.
So the first 2 bytes in memory are the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a 16 bit pointer.
◆ ibpfRGB888Packed
| ibpfRGB888Packed = lib_mvIMPACT_acquire.ibpfRGB888Packed |
A three channel interleaved RGB format containing 24 bit per pixel.
(PFNC name: BGR8)
This is an interleaved pixel format suitable for most display and processing functions. The data is stored pixel-wise:
So the first byte in memory is the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a byte pointer.
◆ ibpfRGB888Planar
| ibpfRGB888Planar = lib_mvIMPACT_acquire.ibpfRGB888Planar |
A three channel planar RGB format.
(PFNC name: RGB8_Planar)
This is a format best suitable for most image processing functions. The image will be converted into 3 planes(a plane for each color component).
So the first byte in memory is the first pixels red component. ImageBuffer.vpData will therefore point to R(1) when using a byte pointer.
- Since
- 2.17.0
◆ ibpfRGBx888Packed
| ibpfRGBx888Packed = lib_mvIMPACT_acquire.ibpfRGBx888Packed |
A four channel interleaved RGB format with 32 bit per pixel containing one alpha byte per pixel.
(PFNC name: BGRa8)
This is an interleaved pixel format suitable for most display functions. The data is stored pixel-wise. The memory layout of the pixel data is like this:
So the first byte in memory is the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a byte pointer. The 4th byte could be used for alpha information but isn't used by this framework.
- Note
- This format reports 3 channels only for backward compatibility reasons while in fact memory is allocated for 4 channels! Use this format with some extra care!
◆ ibpfRGBx888Planar
| ibpfRGBx888Planar = lib_mvIMPACT_acquire.ibpfRGBx888Planar |
A four channel planar RGB format.
(PFNC name: RGBa8_Planar)
This is a format best suitable for most image processing functions. The data is stored in 4 separate planes (one plane for each color component and one alpha plane).
So the first byte in memory is the first pixels red component. ImageBuffer.vpData will therefore point to R(1) when using a byte pointer. All red data will follow!
- Note
- This format reports 3 channels only for backward compatibility reasons while in fact memory is allocated for 4 channels! Use this format with some extra care!
◆ ibpfYUV411_UYYVYY_Packed
| ibpfYUV411_UYYVYY_Packed = lib_mvIMPACT_acquire.ibpfYUV411_UYYVYY_Packed |
A three channel interleaved YUV format occupying 48 bit for four pixels.
(PFNC name: YUV411_8_UYYVYY)
This format uses 4:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 4 pixels in horizontal direction. If each component takes 8 bits, four pixels require 48 bits.
Four consecutive pixels (48 bit, 0xaabbccddeeff ) contain 8 bit chrominance blue of pixels 1, 2, 3 and 4(aa), 8 bit luminance of pixel 1(bb),8 bit luminance of pixel 2(cc), 8 bit chrominance red of pixels 1, 2, 3 and 4(dd), 8 bit luminance of pixel 3(ee) and finally 8 bit luminance of pixel 4(ff).
Thus in memory the data will be stored like this:
So the first byte in memory is the chrominance blue component. ImageBuffer.vpData will therefore point to Cb when using a byte pointer.
- Since
- 2.13.0
◆ ibpfYUV422_10Packed
| ibpfYUV422_10Packed = lib_mvIMPACT_acquire.ibpfYUV422_10Packed |
A three channel interleaved YUV422 format occupying 64 bit for a pair of pixels.
(PFNC name: YUV422_10)
This format uses 2:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 2 pixels in horizontal direction. If each component takes 16 bits, the pair of pixels requires 64 bits.
Two consecutive pixels (64 bit, 0xaaaabbbbccccdddd ) contain 10 bit luminance of pixel 1(aaaa), 10 bit chrominance blue of pixel 1 and 2(bbbb), 10 bit luminance of pixel 2(cccc) and finally 10 bit chrominance red of pixels 1 and 2(dddd). The upper 6 bits of each component will be 0.
Thus in memory the data will be stored like this:
So the first 2 bytes in memory are the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a 16 bit pointer.
◆ ibpfYUV422_UYVY_10Packed
| ibpfYUV422_UYVY_10Packed = lib_mvIMPACT_acquire.ibpfYUV422_UYVY_10Packed |
A three channel interleaved YUV422 format occupying 64 bit for a pair of pixels.
(PFNC name: YUV422_10_UYV)
This format uses 2:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 2 pixels in horizontal direction. If each component takes 16 bits, the pair of pixels requires 64 bits.
Two consecutive pixels (64 bit, 0xaaaabbbbccccdddd ) will contain 10 bit chrominance blue of pixel 1 and 2(aaaa), 10 bit luminance of pixel 1(bbbb), 10 bit chrominance red of pixel 1 and 2 (cccc) and finally 10 bit luminance of pixel 2(dddd). The upper 6 bits of each component will be 0.
Thus in memory the data will be stored like this:
So the first 2 bytes in memory are the first pixels luminance component. ImageBuffer.vpData will therefore point to Cb(1,2) when using a 16 bit pointer.
◆ ibpfYUV422_UYVYPacked
| ibpfYUV422_UYVYPacked = lib_mvIMPACT_acquire.ibpfYUV422_UYVYPacked |
A three channel interleaved YUV422 format occupying 32 bit for a pair of pixels.
(PFNC name: YUV422_8_UYVY)
This format uses 2:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 2 pixels in horizontal direction. If each component takes 8 bits, the pair of pixels requires 32 bits.
Two consecutive pixels (32 bit, 0xaabbccdd ) will contain 8 bit chrominance blue of pixel 1 and 2(aa), 8 bit luminance of pixel 1(bb), 8 bit chrominance red of pixel 1 and 2 (cc) and finally 8 bit luminance of pixel 2(dd).
Thus in memory the data will be stored like this:
So the first byte in memory is the first pixels Cb component. ImageBuffer.vpData will therefore point to Cb(1,2) when using a byte pointer.
◆ ibpfYUV422Packed
| ibpfYUV422Packed = lib_mvIMPACT_acquire.ibpfYUV422Packed |
A three channel interleaved YUV422 format using 32 bit for a pair of pixels.
(PFNC name: YUV422_8)
This format uses 2:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 2 pixels in horizontal direction. Each component takes 8 bits, therefore a pair of pixels requires 32 bits.
Two consecutive pixels (32 bit, 0xaabbccdd ) contain 8 bit luminance of pixel 1(aa), 8 bit chrominance blue of pixel 1 and 2(bb), 8 bit luminance of pixel 2(cc) and finally 8 bit chrominance red of pixels 1 and 2(dd).
Thus in memory the data will be stored like this:
So the first byte in memory is the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a byte pointer.
◆ ibpfYUV422Planar
| ibpfYUV422Planar = lib_mvIMPACT_acquire.ibpfYUV422Planar |
A three channel YUV422 planar format occupying 32 bit for a pair of pixels.
(PFNC name: YUV422_8_YVU_Planar)
This format uses 2:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 2 pixels in horizontal direction. If each component takes 8 bits, the pair of pixels requires 32 bits.
In memory the data will be stored like this:
Thus the Y planes size in bytes equals the sum of the 2 other planes.
So the first byte in memory is the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a byte pointer.
◆ ibpfYUV444_10Packed
| ibpfYUV444_10Packed = lib_mvIMPACT_acquire.ibpfYUV444_10Packed |
A three channel interleaved YUV format occupying 48 bit per pixel with 30 bit of usable data per pixel.
(PFNC name: YUV10)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned, thus the 6 MSB of each 16 bit will not contain valid data.
So the first byte in memory is the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a 16 bit pointer.
◆ ibpfYUV444_UYV_10Packed
| ibpfYUV444_UYV_10Packed = lib_mvIMPACT_acquire.ibpfYUV444_UYV_10Packed |
A three channel interleaved YUV format occupying 48 bit per pixel with 30 bit of usable data per pixel.
(PFNC name: YUV422_10_UYV)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned, thus the 6 MSB of each 16 bit will not contain valid data.
So the first byte in memory is the first pixels Cb component. ImageBuffer.vpData will therefore point to Cb(1) when using a 16 bit pointer.
◆ ibpfYUV444_UYVPacked
| ibpfYUV444_UYVPacked = lib_mvIMPACT_acquire.ibpfYUV444_UYVPacked |
A three channel interleaved YUV format occupying 24 bit per pixel.
(PFNC name: YUV8_UYV)
This is an interleaved pixel format.
The data is stored pixel-wise:
So the first byte in memory is the first pixels Cb component. ImageBuffer.vpData will therefore point to Cb(1) when using a byte pointer.
◆ ibpfYUV444Packed
| ibpfYUV444Packed = lib_mvIMPACT_acquire.ibpfYUV444Packed |
A three channel interleaved YUV format occupying 24 bit per pixel.
(PFNC name: YUV8)
This is an interleaved pixel format.
The data is stored pixel-wise:
So the first byte in memory is the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a byte pointer.
◆ ibpfYUV444Planar
| ibpfYUV444Planar = lib_mvIMPACT_acquire.ibpfYUV444Planar |
A three channel YUV444 planar format occupying 24 bit per pixels.
(PFNC name: YUV444_8_YVU_Planar)
A planar YUV format. In memory the data will be stored plane-wise like this:
So the first byte in memory is the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a byte pointer.
◆ IDE_DirectDrawAccessFailed
| IDE_DirectDrawAccessFailed = lib_mvIMPACT_acquire.IDE_DirectDrawAccessFailed |
Calling a DirectDraw® function did fail.
◆ IDE_InternalError
| IDE_InternalError = lib_mvIMPACT_acquire.IDE_InternalError |
Unspecified internal error.
◆ IDE_InvalidHandle
| IDE_InvalidHandle = lib_mvIMPACT_acquire.IDE_InvalidHandle |
One or more of the handles passed to a function where invalid.
◆ IDE_NoError
| IDE_NoError = lib_mvIMPACT_acquire.IDE_NoError |
No error occurred since the last time the error code was queried.
◆ IDE_OutOfMemory
| IDE_OutOfMemory = lib_mvIMPACT_acquire.IDE_OutOfMemory |
There is not enough memory available to perform the requested operation.
◆ IDE_UpdateFailed
| IDE_UpdateFailed = lib_mvIMPACT_acquire.IDE_UpdateFailed |
The update failed.
This usually is an internal error but will also be returned when a raw buffer has been passed to the display module since it then is unclear how to draw it.
◆ idpfAuto
| idpfAuto = lib_mvIMPACT_acquire.idpfAuto |
The driver will decide which destination format will be used.
◆ idpfBGR101010Packed_V2
| idpfBGR101010Packed_V2 = lib_mvIMPACT_acquire.idpfBGR101010Packed_V2 |
A three channel 10 bit per color component RGB packed format occupying 32 bit per pixel.
(PFNC name: RGB10p32)
This format will use 4 bytes to store one 10 bit per color component RGB pixel. The following memory layout is used for each pixel:
The last 2 bit of each 32 bit bit may contain undefined data.
◆ idpfBGR888Packed
| idpfBGR888Packed = lib_mvIMPACT_acquire.idpfBGR888Packed |
A three channel interleaved RGB format with 24 bit per pixel.
(PFNC name: RGB8)
This is an interleaved pixel format suitable for most processing functions. Most blit/display function however will expect idpfRGB888Packed. The data is stored pixel-wise:
So the first byte in memory is the first pixels red component. ImageBuffer.vpData will therefore point to R(1) when using a byte pointer.
◆ idpfMono10
| idpfMono10 = lib_mvIMPACT_acquire.idpfMono10 |
A single channel 10 bit per pixel format.
(PFNC name: Mono10)
Each pixel in this format consumes 2 bytes of memory. The lower 10 bit of this 2 bytes will contain valid data.
◆ idpfMono12
| idpfMono12 = lib_mvIMPACT_acquire.idpfMono12 |
A single channel 12 bit per pixel format.
(PFNC name: Mono12)
Each pixel in this format consumes 2 bytes of memory. The lower 12 bit of this 2 bytes will contain valid data.
◆ idpfMono12Packed_V1
| idpfMono12Packed_V1 = lib_mvIMPACT_acquire.idpfMono12Packed_V1 |
A single channel 12 bit per pixel packed format occupying 12 bit per pixel.
(PFNC name: Mono12p)
This format will use 3 bytes to store 2 12 bit pixel. Every 3 bytes will use the following layout in memory:
- Note
- When the width is not divisible by 2 the line pitch of a buffer can't be used to calculate line start offsets in a buffer! In that case something like this can be used to access a certain pixel (pseudo code assuming 'pointerToStartOfTheBuffer' is a 'byte pointer'):
- Since
- 2.5.0
◆ idpfMono12Packed_V2
| idpfMono12Packed_V2 = lib_mvIMPACT_acquire.idpfMono12Packed_V2 |
A single channel 12 bit per pixel packed format occupying 12 bit per pixel.
(PFNC name: Mono12Packed)
This format will use 3 bytes to store 2 12 bit pixel. Every 3 bytes will use the following layout in memory:
- Note
- When the width is not divisible by 2 the line pitch of a buffer can't be used to calculate line start offsets in a buffer! In that case something like this can be used to access a certain pixel (pseudo code assuming 'pointerToStartOfTheBuffer' is a 'byte pointer'):
◆ idpfMono14
| idpfMono14 = lib_mvIMPACT_acquire.idpfMono14 |
A single channel 14 bit per pixel format.
(PFNC name: Mono14)
Each pixel in this format consumes 2 bytes of memory. The lower 14 bit of this 2 bytes will contain valid data.
◆ idpfMono16
| idpfMono16 = lib_mvIMPACT_acquire.idpfMono16 |
A single channel 16 bit per pixel format.
(PFNC name: Mono16)
◆ idpfMono8
| idpfMono8 = lib_mvIMPACT_acquire.idpfMono8 |
A single channel 8 bit per pixel format.
(PFNC name: Mono8)
◆ idpfRaw
| idpfRaw = lib_mvIMPACT_acquire.idpfRaw |
An unprocessed block of data.
◆ idpfRGB101010Packed
| idpfRGB101010Packed = lib_mvIMPACT_acquire.idpfRGB101010Packed |
A three channel interleaved RGB image occupying 48 bit with 30 bit of usable data per pixel.
(PFNC name: BGR10)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned, thus the 6 MSB of each 16 bit will not contain valid data.
So the first 2 bytes in memory are the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a 16 bit pointer.
◆ idpfRGB121212Packed
| idpfRGB121212Packed = lib_mvIMPACT_acquire.idpfRGB121212Packed |
A three channel interleaved RGB image occupying 48 bit with 36 bit of usable data per pixel.
(PFNC name: BGR12)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned, thus the 4 MSB of each 16 bit will not contain valid data.
So the first 2 bytes in memory are the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a 16 bit pointer.
◆ idpfRGB141414Packed
| idpfRGB141414Packed = lib_mvIMPACT_acquire.idpfRGB141414Packed |
A three channel interleaved RGB image occupying 48 bit with 42 bit of usable data per pixel.
(PFNC name: BGR14)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned, thus the 2 MSB of each 16 bit will not contain valid data.
So the first 2 bytes in memory are the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a 16 bit pointer.
◆ idpfRGB161616Packed
| idpfRGB161616Packed = lib_mvIMPACT_acquire.idpfRGB161616Packed |
A three channel interleaved RGB image occupying 48 bit per pixel.
(PFNC name: BGR16)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned.
So the first 2 bytes in memory are the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a 16 bit pointer.
◆ idpfRGB888Packed
| idpfRGB888Packed = lib_mvIMPACT_acquire.idpfRGB888Packed |
A three channel interleaved RGB format containing 24 bit per pixel.
(PFNC name: BGR8)
This is an interleaved pixel format suitable for most display and processing functions. The data is stored pixel-wise:
So the first byte in memory is the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a byte pointer.
◆ idpfRGB888Planar
| idpfRGB888Planar = lib_mvIMPACT_acquire.idpfRGB888Planar |
A three channel planar RGB format.
(PFNC name: RGB8_Planar)
This is a format best suitable for most image processing functions. The image will be converted into 3 planes(a plane for each color component).
So the first byte in memory is the first pixels red component. ImageBuffer.vpData will therefore point to R(1) when using a byte pointer.
- Since
- 2.17.0
◆ idpfRGBx888Packed
| idpfRGBx888Packed = lib_mvIMPACT_acquire.idpfRGBx888Packed |
A four channel interleaved RGB format with 32 bit per pixel containing one alpha byte per pixel.
(PFNC name: BGRa8)
This is an interleaved pixel format suitable for most display functions. The data is stored pixel-wise. The memory layout of the pixel data is like this:
So the first byte in memory is the first pixels blue component. ImageBuffer.vpData will therefore point to B(1) when using a byte pointer. The 4th byte could be used for alpha information but isn't used by this framework.
- Note
- This format reports 3 channels only for backward compatibility reasons while in fact memory is allocated for 4 channels! Use this format with some extra care!
◆ idpfRGBx888Planar
| idpfRGBx888Planar = lib_mvIMPACT_acquire.idpfRGBx888Planar |
A four channel planar RGB format.
(PFNC name: RGBa8_Planar)
This is a format best suitable for most image processing functions. The data is stored in 4 separate planes (one plane for each color component and one alpha plane).
So the first byte in memory is the first pixels red component. ImageBuffer.vpData will therefore point to R(1) when using a byte pointer. All red data will follow!
- Note
- This format reports 3 channels only for backward compatibility reasons while in fact memory is allocated for 4 channels! Use this format with some extra care!
◆ idpfYUV411_UYYVYY_Packed
| idpfYUV411_UYYVYY_Packed = lib_mvIMPACT_acquire.idpfYUV411_UYYVYY_Packed |
A three channel interleaved YUV format occupying 48 bit for four pixels.
(PFNC name: YUV411_8_UYYVYY)
This format uses 4:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 4 pixels in horizontal direction. If each component takes 8 bits, four pixels require 48 bits.
Four consecutive pixels (48 bit, 0xaabbccddeeff ) contain 8 bit chrominance blue of pixels 1, 2, 3 and 4(aa), 8 bit luminance of pixel 1(bb),8 bit luminance of pixel 2(cc), 8 bit chrominance red of pixels 1, 2, 3 and 4(dd), 8 bit luminance of pixel 3(ee) and finally 8 bit luminance of pixel 4(ff).
Thus in memory the data will be stored like this:
So the first byte in memory is the chrominance blue component. ImageBuffer.vpData will therefore point to Cb when using a byte pointer.
- Since
- 2.13.0
◆ idpfYUV422_10Packed
| idpfYUV422_10Packed = lib_mvIMPACT_acquire.idpfYUV422_10Packed |
A three channel interleaved YUV422 format occupying 64 bit for a pair of pixels.
(PFNC name: YUV422_10)
This format uses 2:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 2 pixels in horizontal direction. If each component takes 16 bits, the pair of pixels requires 64 bits.
Two consecutive pixels (64 bit, 0xaaaabbbbccccdddd ) contain 10 bit luminance of pixel 1(aaaa), 10 bit chrominance blue of pixel 1 and 2(bbbb), 10 bit luminance of pixel 2(cccc) and finally 10 bit chrominance red of pixels 1 and 2(dddd). The upper 6 bits of each component will be 0.
Thus in memory the data will be stored like this:
So the first 2 bytes in memory are the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a 16 bit pointer.
◆ idpfYUV422_UYVY_10Packed
| idpfYUV422_UYVY_10Packed = lib_mvIMPACT_acquire.idpfYUV422_UYVY_10Packed |
A three channel interleaved YUV422 format occupying 64 bit for a pair of pixels.
(PFNC name: YUV422_10_UYV)
This format uses 2:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 2 pixels in horizontal direction. If each component takes 16 bits, the pair of pixels requires 64 bits.
Two consecutive pixels (64 bit, 0xaaaabbbbccccdddd ) will contain 10 bit chrominance blue of pixel 1 and 2(aaaa), 10 bit luminance of pixel 1(bbbb), 10 bit chrominance red of pixel 1 and 2 (cccc) and finally 10 bit luminance of pixel 2(dddd). The upper 6 bits of each component will be 0.
Thus in memory the data will be stored like this:
So the first 2 bytes in memory are the first pixels luminance component. ImageBuffer.vpData will therefore point to Cb(1,2) when using a 16 bit pointer.
◆ idpfYUV422_UYVYPacked
| idpfYUV422_UYVYPacked = lib_mvIMPACT_acquire.idpfYUV422_UYVYPacked |
A three channel interleaved YUV422 format occupying 32 bit for a pair of pixels.
(PFNC name: YUV422_8_UYV)
This format uses 2:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 2 pixels in horizontal direction. If each component takes 8 bits, the pair of pixels requires 32 bits.
Two consecutive pixels (32 bit, 0xaabbccdd ) will contain 8 bit chrominance blue of pixel 1 and 2(aa), 8 bit luminance of pixel 1(bb), 8 bit chrominance red of pixel 1 and 2 (cc) and finally 8 bit luminance of pixel 2(dd).
Thus in memory the data will be stored like this:
So the first byte in memory is the first pixels Cb component. ImageBuffer.vpData will therefore point to Cb(1,2) when using a byte pointer.
◆ idpfYUV422Packed
| idpfYUV422Packed = lib_mvIMPACT_acquire.idpfYUV422Packed |
A three channel interleaved YUV422 format using 32 bit for a pair of pixels.
(PFNC name: YUV422_8)
This format uses 2:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 2 pixels in horizontal direction. Each component takes 8 bits, therefore a pair of pixels requires 32 bits.
Two consecutive pixels (32 bit, 0xaabbccdd ) contain 8 bit luminance of pixel 1(aa), 8 bit chrominance blue of pixel 1 and 2(bb), 8 bit luminance of pixel 2(cc) and finally 8 bit chrominance red of pixels 1 and 2(dd).
Thus in memory the data will be stored like this:
So the first byte in memory is the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a byte pointer.
◆ idpfYUV422Planar
| idpfYUV422Planar = lib_mvIMPACT_acquire.idpfYUV422Planar |
A three channel planar YUV422 format.
(PFNC name: YUV422_8_YVU_Planar)
This format uses 2:1 horizontal downsampling, meaning the Y component is sampled at each pixel, while U(Cb) and V(Cr) components are sampled every 2 pixels in horizontal direction. If each component takes 8 bits, the pair of pixels requires 32 bits.
In memory the data will be stored like this:
Thus the Y planes size in bytes equals the sum of the 2 other planes.
So the first byte in memory is the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a byte pointer.
◆ idpfYUV444_10Packed
| idpfYUV444_10Packed = lib_mvIMPACT_acquire.idpfYUV444_10Packed |
A three channel interleaved YUV format occupying 48 bit per pixel with 30 bit of usable data per pixel.
(PFNC name: YUV10)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned, thus the 6 MSB of each 16 bit will not contain valid data.
So the first byte in memory is the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a 16 bit pointer.
◆ idpfYUV444_UYV_10Packed
| idpfYUV444_UYV_10Packed = lib_mvIMPACT_acquire.idpfYUV444_UYV_10Packed |
A three channel interleaved YUV format occupying 48 bit per pixel with 30 bit of usable data per pixel.
(PFNC name: YUV422_8_UYV)
This is an interleaved pixel format with 2 bytes per color component. The data is stored pixel-wise:
The data of each color component will be LSB aligned, thus the 6 MSB of each 16 bit will not contain valid data.
So the first byte in memory is the first pixels Cb component. ImageBuffer.vpData will therefore point to Cb(1) when using a 16 bit pointer.
◆ idpfYUV444_UYVPacked
| idpfYUV444_UYVPacked = lib_mvIMPACT_acquire.idpfYUV444_UYVPacked |
A three channel interleaved YUV format occupying 24 bit per pixel.
(PFNC name: YUV8_UYV)
This is an interleaved pixel format.
The data is stored pixel-wise:
So the first byte in memory is the first pixels Cb component. ImageBuffer.vpData will therefore point to Cb(1) when using a byte pointer.
◆ idpfYUV444Packed
| idpfYUV444Packed = lib_mvIMPACT_acquire.idpfYUV444Packed |
A three channel interleaved YUV format occupying 24 bit per pixel.
(PFNC name: YUV8)
This is an interleaved pixel format.
The data is stored pixel-wise:
So the first byte in memory is the first pixels luminance component. ImageBuffer.vpData will therefore point to Y(1) when using a byte pointer.
◆ iebForceEnumerate
| iebForceEnumerate = lib_mvIMPACT_acquire.iebForceEnumerate |
The interface will forcefully enumerate devices, regardless of the general enumeration behavior of this interface type(overrides EnumerateEnable setting).
◆ iebForceIgnore
| iebForceIgnore = lib_mvIMPACT_acquire.iebForceIgnore |
The interface will not enumerate devices, regardless of the general enumeration behavior of this interface type(overrides EnumerateEnable setting).
◆ iebNotConfigured
| iebNotConfigured = lib_mvIMPACT_acquire.iebNotConfigured |
The interface will enumerate devices or not according to the general enumeration behavior of this interface type(according to EnumerateEnable setting).
◆ iffAuto
| iffAuto = lib_mvIMPACT_acquire.iffAuto |
Automatically tries to select the file format e.g.
from the file extension
◆ iffBMP
| iffBMP = lib_mvIMPACT_acquire.iffBMP |
The BMP format.
◆ iffJPEG
| iffJPEG = lib_mvIMPACT_acquire.iffJPEG |
The JPEG format.
◆ iffPNG
| iffPNG = lib_mvIMPACT_acquire.iffPNG |
The PNG format.
◆ iffTIFF
| iffTIFF = lib_mvIMPACT_acquire.iffTIFF |
The TIFF format.
◆ IM_CUBIC
| IM_CUBIC = lib_mvIMPACT_acquire.IM_CUBIC |
Cubic interpolation.
Best quality, highest CPU load.
◆ IM_LINEAR
| IM_LINEAR = lib_mvIMPACT_acquire.IM_LINEAR |
Linear interpolation.
Both quality and CPU load will be average.
◆ IM_NEAREST_NEIGHBOUR
| IM_NEAREST_NEIGHBOUR = lib_mvIMPACT_acquire.IM_NEAREST_NEIGHBOUR |
Nearest neighbor interpolation (default).
Fast but with reduced quality.
◆ imOff
| imOff = lib_mvIMPACT_acquire.imOff |
Disable the interlaced function.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ imOn
| imOn = lib_mvIMPACT_acquire.imOn |
Enable the interlaced function.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
The device will re-construct the interlaced data into a full frame. InvInterlaced/Interlaced is controlled by the camera parameter.
◆ INVALID_ID
| INVALID_ID = cvar.INVALID_ID |
◆ ipfOff
| ipfOff = lib_mvIMPACT_acquire.ipfOff |
No filter function will be applied to the image.
◆ ipfSharpen
| ipfSharpen = lib_mvIMPACT_acquire.ipfSharpen |
A sharpen filter will be applied to the image.
◆ ipmDefault
| ipmDefault = lib_mvIMPACT_acquire.ipmDefault |
The default mode where every image is processed in the order they have been acquired.
◆ ipmProcessLatestOnly
| ipmProcessLatestOnly = lib_mvIMPACT_acquire.ipmProcessLatestOnly |
This mode can be useful for applications where processing on the host takes longer than the average time between two consecutive frames transmitted by the device.
This might be useful for applications that display the processed result but that also want to capture data at the highest possible frame rate and is not important that EVERY image gets processed.
- Note
- This mode might result in images being returned without the expected processing on the host.
◆ ipoMaximizeSpeed
| ipoMaximizeSpeed = lib_mvIMPACT_acquire.ipoMaximizeSpeed |
Will maximize the execution speed.
This might result in a higher memory consumption.
◆ ipoMinimizeMemoryUsage
| ipoMinimizeMemoryUsage = lib_mvIMPACT_acquire.ipoMinimizeMemoryUsage |
Will minimize the memory footprint.
This might result in a higher CPU load.
- Note
- This mode will also result in a higher amount of memory allocation and freeing operations thus if the application itself is working with heap memory a lot the long term effects of heap fragmentation should be considered!
◆ iprApplied
| iprApplied = lib_mvIMPACT_acquire.iprApplied |
This algorithm has been applied to this request object.
◆ iprFailure
| iprFailure = lib_mvIMPACT_acquire.iprFailure |
A problem was encountered when this algorithm has been applied to this request object.
One reason for this result might be that an unsupported pixel format was fed into this algorithm. The log-file will provide additional information then.
◆ iprNotActive
| iprNotActive = lib_mvIMPACT_acquire.iprNotActive |
This algorithm was either switched off or not needed when applied to this request object.
When an algorithm is switched on and this result is returned this can indicate e.g. that for a format conversion the input and output format where identical.
◆ iprNotApplicable
| iprNotApplicable = lib_mvIMPACT_acquire.iprNotApplicable |
This algorithm has NOT been applied because it was not applicable.
This result will be reported whenever a buffer was fed into a filter that was not applicable. An example for such a situation would be a JPEG image that has been fed into a de-Bayer algorithm.
- Since
- 2.22.1
◆ iprSkipped
| iprSkipped = lib_mvIMPACT_acquire.iprSkipped |
This algorithm has NOT been applied because of a lack of processing time.
In most cases the acquisition frame rate(thus the frame rate generated on the device) was higher than the processing frame rate the host can handle and the user has explicitly configured the image processing mode to skip images then.
◆ ircmCounting
| ircmCounting = lib_mvIMPACT_acquire.ircmCounting |
Reserved.
Currently not implemented.
◆ ircmLive
| ircmLive = lib_mvIMPACT_acquire.ircmLive |
Reserved.
Currently not implemented.
◆ ircmManual
| ircmManual = lib_mvIMPACT_acquire.ircmManual |
The standard mode for image requests.
In this mode one image will be captured from the hardware for each request that is sent to the device driver. The image will be taken with respect to the current parameters as defined in the setting selected in the corresponding image request control.
◆ ircmTrial
| ircmTrial = lib_mvIMPACT_acquire.ircmTrial |
In this mode no 'real' image will be captured, but the whole processing chain will be traversed once.
This mode can be used either to find out what the image format and parameters after an image capture would be with the current settings or to prepare the hardware before starting the first image acquisition to save time when real image data is processed.
When requesting an image in this mode, the corresponding wait function will return a complete request object with pixel format, dimensions and image buffer that contains some dummy data.
◆ ircmUpdateBufferLayout
| ircmUpdateBufferLayout = lib_mvIMPACT_acquire.ircmUpdateBufferLayout |
In this mode no 'real' image will be captured, but the whole processing chain will be traversed once.
This mode can be used either to find out what the image format and parameters after an image capture would be with the current settings or to prepare the hardware before starting the first image acquisition to save time when real image data is processed.
In this mode, no wait function must be called. When the image request function has returned successfully, the current destination buffer layout will be available as part of the general information properties.
◆ irpCameraOutputUsed
| irpCameraOutputUsed = lib_mvIMPACT_acquire.irpCameraOutputUsed |
The camera output used to transmit the image from the imaging device to the capture device.
◆ irpPixelFormat
| irpPixelFormat = lib_mvIMPACT_acquire.irpPixelFormat |
The pixel format of an image request buffer.
◆ irpResult
| irpResult = lib_mvIMPACT_acquire.irpResult |
The Result associated with an image request.
◆ irpState
| irpState = lib_mvIMPACT_acquire.irpState |
The current state of an image request.
◆ iscmBayer
| iscmBayer = lib_mvIMPACT_acquire.iscmBayer |
This is a Bayer color sensor.
◆ iscmColor
| iscmColor = lib_mvIMPACT_acquire.iscmColor |
This is a color sensor.
◆ iscmMono
| iscmMono = lib_mvIMPACT_acquire.iscmMono |
This is a mono sensor.
◆ iscmNIR
| iscmNIR = lib_mvIMPACT_acquire.iscmNIR |
This is a sensor sensitive in the near IF spectrum only.
◆ iscmUnknown
| iscmUnknown = lib_mvIMPACT_acquire.iscmUnknown |
This is an unknown type of sensor.
◆ iscpBlueGreen
| iscpBlueGreen = lib_mvIMPACT_acquire.iscpBlueGreen |
This sensor starts to transmit a green pixel from a green and blue line.
The raw image therefore is structured like this:
GBGBGBGBGBGBG etc.
RGRGRGRGRGRGR etc.
GBGBGBGBGBGBG etc.
etc.
◆ iscpGreenBlue
| iscpGreenBlue = lib_mvIMPACT_acquire.iscpGreenBlue |
This sensor starts to transmit a blue pixel from a green and blue line.
The raw image therefore is structured like this:
BGBGBGBGBGBGB etc.
GRGRGRGRGRGRG etc.
BGBGBGBGBGBGB etc.
etc.
◆ iscpGreenRed
| iscpGreenRed = lib_mvIMPACT_acquire.iscpGreenRed |
This sensor starts to transmit a green pixel from a green and red line.
The raw image therefore is structured like this:
GRGRGRGRGRGRG etc.
BGBGBGBGBGBGB etc.
GRGRGRGRGRGRG etc.
etc.
◆ iscpRedGreen
| iscpRedGreen = lib_mvIMPACT_acquire.iscpRedGreen |
This sensor starts to transmit a red pixel from a green and red line.
The raw image therefore is structured like this:
RGRGRGRGRGRGR etc.
GBGBGBGBGBGBG etc.
RGRGRGRGRGRGR etc.
etc.
◆ iscpUnknown
| iscpUnknown = lib_mvIMPACT_acquire.iscpUnknown |
Nothing is known about the way the sensor transmits data.
◆ istCCD
| istCCD = lib_mvIMPACT_acquire.istCCD |
This is a CCD sensor.
◆ istCMOS
| istCMOS = lib_mvIMPACT_acquire.istCMOS |
This is a CMOS sensor.
◆ istUnknown
| istUnknown = lib_mvIMPACT_acquire.istUnknown |
This is an unknown type of sensor.
◆ lcOff
| lcOff = lib_mvIMPACT_acquire.lcOff |
Disables line counter.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ lcOn
| lcOn = lib_mvIMPACT_acquire.lcOn |
Enables line counter.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ lqDeviceManager
| lqDeviceManager = lib_mvIMPACT_acquire.lqDeviceManager |
Specifies the mvDeviceManager library.
◆ lqPropHandling
| lqPropHandling = lib_mvIMPACT_acquire.lqPropHandling |
Specifies the mvPropHandling library.
◆ LUTgmLinearStart
| LUTgmLinearStart = lib_mvIMPACT_acquire.LUTgmLinearStart |
Maps an image by applying a linear interpolation in the lower intensity range of the LUT and an intensity transformation with gamma correction to the upper intensity range of the LUT.
◆ LUTgmStandard
| LUTgmStandard = lib_mvIMPACT_acquire.LUTgmStandard |
Default gamma mode.
Maps an image by applying intensity transformation with gamma correction to the complete intensity range of the LUT.
◆ LUTiHardware
| LUTiHardware = lib_mvIMPACT_acquire.LUTiHardware |
The mapping of the image data will be done in hardware.
When set to 'Hardware' the LUT operation will NOT introduce additional CPU load. This feature will no be available for every device.
◆ LUTimCubic
| LUTimCubic = lib_mvIMPACT_acquire.LUTimCubic |
Maps an image by applying intensity transformation with cubic interpolation.
◆ LUTimLinear
| LUTimLinear = lib_mvIMPACT_acquire.LUTimLinear |
Maps an image by applying intensity transformation with linear interpolation.
◆ LUTimThreshold
| LUTimThreshold = lib_mvIMPACT_acquire.LUTimThreshold |
Maps an image by applying intensity transformation based on a set of given threshold values.
◆ LUTiSoftware
| LUTiSoftware = lib_mvIMPACT_acquire.LUTiSoftware |
The mapping of the image data will be done with an optimized software algorithm.
◆ LUTm10To10
| LUTm10To10 = lib_mvIMPACT_acquire.LUTm10To10 |
10 bit input data will be mapped to 10 bit output data.
◆ LUTm10To8
| LUTm10To8 = lib_mvIMPACT_acquire.LUTm10To8 |
10 bit input data will be mapped to 8 bit output data.
◆ LUTm12To10
| LUTm12To10 = lib_mvIMPACT_acquire.LUTm12To10 |
12 bit input data will be mapped to 10 bit output data.
◆ LUTm12To12
| LUTm12To12 = lib_mvIMPACT_acquire.LUTm12To12 |
12 bit input data will be mapped to 12 bit output data.
◆ LUTm14To14
| LUTm14To14 = lib_mvIMPACT_acquire.LUTm14To14 |
14 bit input data will be mapped to 14 bit output data.
- Since
- 2.0.2
◆ LUTm16To16
| LUTm16To16 = lib_mvIMPACT_acquire.LUTm16To16 |
16 bit input data will be mapped to 16 bit output data.
- Since
- 2.0.2
◆ LUTm8To8
| LUTm8To8 = lib_mvIMPACT_acquire.LUTm8To8 |
8 bit input data will be mapped to 8 bit output data.
◆ LUTmDirect
| LUTmDirect = lib_mvIMPACT_acquire.LUTmDirect |
Maps an image by applying intensity transformation.
◆ LUTmGamma
| LUTmGamma = lib_mvIMPACT_acquire.LUTmGamma |
Maps an image by applying intensity transformation with gamma correction.
Since the human eye perceives light similar to a logarithm of real light intensity it's characteristic curve is non-linear. It follows the rule of (intensity ^ gamma) with a gamma value between 0.3-0.5. To provide as much useful information as possible, the image is converted from 12-bit acquired by the sensor to 8-bit utilizing this characteristic curve. The result is a linearized image optimized for the human eye's non-linear behavior which allows to perceive as much intensity differences as possible.
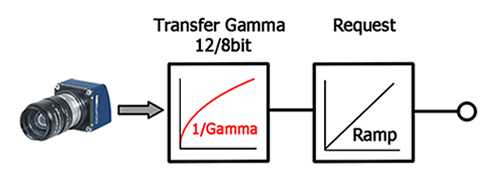
◆ LUTmInterpolated
| LUTmInterpolated = lib_mvIMPACT_acquire.LUTmInterpolated |
Maps an image by applying interpolated intensity transformation between a set of given sampling points.
◆ mmLeftRight
| mmLeftRight = lib_mvIMPACT_acquire.mmLeftRight |
The resulting image will be flipped around a vertical axis.
◆ mmmAuto
| mmmAuto = lib_mvIMPACT_acquire.mmmAuto |
Automatic mode.
In this mode the DMA memory is only used as intermediate buffer. The user has no direct access to it instead he get always a copy of the image that resides on the heap. Internally the DMA memory is organized as ring buffer. It decouples the autonomous grabbing of the board from the application. The size of the memory should be big enough to hold as many images as requests are used in the application.
◆ mmmPool
| mmmPool = lib_mvIMPACT_acquire.mmmPool |
Pool Mode.
This mode allows direct access to the DMA memory. So its not necessary for the driver to make copies of the images. This improves the performance of the system. But there is one disadvantage: The partitioning of the DMA memory is fixed and has to be done by the user. The block size must be set to the image size in bytes. Additional the block count must be set. Before these parameters can be changed it must be sure that all ImageBuffers are returned and the grabber is stopped.
◆ mmOff
| mmOff = lib_mvIMPACT_acquire.mmOff |
No Mirroring.
◆ mmpmAuto
| mmpmAuto = lib_mvIMPACT_acquire.mmpmAuto |
Use Pool in Automatic Mode.
◆ mmpmFixed
| mmpmFixed = lib_mvIMPACT_acquire.mmpmFixed |
Use Pool in Manual Mode.
◆ mmpmOff
| mmpmOff = lib_mvIMPACT_acquire.mmpmOff |
Dont use Pool.
◆ mmTopDown
| mmTopDown = lib_mvIMPACT_acquire.mmTopDown |
The resulting image will be flipped around a horizontal axis.
◆ mmTopDownAndLeftRight
| mmTopDownAndLeftRight = lib_mvIMPACT_acquire.mmTopDownAndLeftRight |
The resulting image will be both around a horizontal and vertical axis.
◆ momChannelBased
| momChannelBased = lib_mvIMPACT_acquire.momChannelBased |
The mirror mode can be selected for differently for each channel of the image.
◆ momGlobal
| momGlobal = lib_mvIMPACT_acquire.momGlobal |
There will be a single mode option only and this mode will be applied to all channels of the image.
◆ object
| object = obj__ |
◆ obmmDefault
| obmmDefault = lib_mvIMPACT_acquire.obmmDefault |
The device will work with reasonable default values.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
This option will be the right choice for most of the user.
◆ obmmUser
| obmmUser = lib_mvIMPACT_acquire.obmmUser |
The user can define how the on board memory of the device will be used.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
This is for advanced users only and will not be necessary in most of the cases.
◆ plMaxValue
| plMaxValue = lib_mvIMPACT_acquire.plMaxValue |
Set/Get the maximum value for this mvIMPACT.acquire.Property.
Pass this as the index to set or get the maximum number of values this property can store with a call to the mvIMPACT.acquire.Property object's corresponding read or write method.
◆ plMinValue
| plMinValue = lib_mvIMPACT_acquire.plMinValue |
Set/Get the minimum value for this mvIMPACT.acquire.Property.
Pass this as the index to set or get the maximum number of values this property can store with a call to the mvIMPACT.acquire.Property object's corresponding read or write method.
◆ plStepWidth
| plStepWidth = lib_mvIMPACT_acquire.plStepWidth |
Set/Get the step width value for this mvIMPACT.acquire.Property.
Pass this as the index to set or get the maximum number of values this property can store with a call to the mvIMPACT.acquire.Property object's corresponding read or write method.
◆ primLinear
| primLinear = lib_mvIMPACT_acquire.primLinear |
Linear interpolation.
The resulting image therefore will have either 4 times the number of pixels for horizontal or vertical polarization data extraction modes or the same dimensions as the input image for single extraction mode. The additional pixel data will be generated using linear interpolation algorithm
- Since
- 2.29.0
◆ primOff
| primOff = lib_mvIMPACT_acquire.primOff |
No interpolation.
The resulting image therefore will have the same amount of pixels for horizontal or vertical polarization data extraction modes or a reduced number of pixels for all other modes.
- Since
- 2.29.0
◆ prm2By2
| prm2By2 = lib_mvIMPACT_acquire.prm2By2 |
The pixels will be re-arranged in a way the image keeps its original dimension but each polarization angle will afterwards occupy a certain section in the image.
The upper left quarter of the resulting image will contain all the upper left pixels from each 2 by 2 pixel region etc.
- Since
- 2.29.1
◆ prmExtractAngle
| prmExtractAngle = lib_mvIMPACT_acquire.prmExtractAngle |
The angle of the maximum polarization for every '2 * 2' region in the image will be calculated and the resulting value will then be mapped to the value range of the source pixel format.
The resulting image therefore will have a width equal to 'input image width / 2' and a height equal to 'input image height / 2'. From each 2 by 2 region (thus 4 input values) a single output value will be calculated and placed into the resulting image. In this mode the output pixel format will be the same as the input pixel format and the resulting value will be mapped to this pixel formats value range thus the maximum angle (180 degree) will correspond the maximum pixel value in this format (e.g. 1023 for mvIMPACT.acquire.ibpfMono10).
The angle of the maximum polarization is calculated based the formula:
![\[\Theta = \frac{1}{2}*atan\left (\left ( P45-P135 \right ); \left (P0 - P90\right )\right ) \]](form_0.png)
- Note
- Pixels which are saturated or which don't show a signal at all will cause incorrect polarization data. This happens as a result of wrong relations between the different polarization directions which causes wrong values for the different stokes parameters resulting in incorrect pixel data. Different exposure settings might improve the result.
- Since
- 2.38.0
◆ prmExtractDegree
| prmExtractDegree = lib_mvIMPACT_acquire.prmExtractDegree |
The degree of the polarization for every '2 * 2' region in the image will be calculated and the resulting value will then be mapped to the value range of the source pixel format.
The resulting image therefore will have a width equal to 'input image width / 2' and a height equal to 'input image height / 2'. From each 2 by 2 region (thus 4 input values) a single output value will be calculated and placed into the resulting image. In this mode the output pixel format will be the same as the input pixel format and the resulting value will be mapped to this pixel formats value range thus the maximum polarization will correspond the maximum pixel value in this format (e.g. 1023 for mvIMPACT.acquire.ibpfMono10).
The calculation of the degree of the maximum polarization is based the formula:
![\[\Pi = \frac{\sqrt{\left(P0-P90\right)^{2}+\left(P45-P135\right)^{2}}}{\left(P0+P90\right)}\]](form_1.png)
- Note
- Pixels which are saturated or which don't show a signal at all will cause incorrect polarization data. This happens as a result of wrong relations between the different polarization directions which causes wrong values for the different stokes parameters resulting in incorrect pixel data. Different exposure settings might improve the result.
- Since
- 2.38.0
◆ prmExtractSingle
| prmExtractSingle = lib_mvIMPACT_acquire.prmExtractSingle |
The pixel selected by 'PolarizedDataExtractionChannelIndex' will be extracted and forwarded from each region defined by '2 * 2'.
The resulting image therefore will have a width equal to 'input image width / 2' and a height equal to 'input image height / 2'
- Since
- 2.29.0
◆ prmHorizontal
| prmHorizontal = lib_mvIMPACT_acquire.prmHorizontal |
The pixels will be re-arranged one after the other thus the resulting image will have a width of 'input image width * 2' and a height of 'input image height / 2'.
The resulting image will consist of several small images sitting next each other. The first image will contain all the upper left pixels from each extraction ROI, the last image all the lower right pixels. The images in between will be extracted line by line and then row by row.
- Since
- 2.29.0
◆ prmMeanValue
| prmMeanValue = lib_mvIMPACT_acquire.prmMeanValue |
The mean value of all pixels whose value ranges from 'PolarizedDataExtractionLowerLimit' to 'PolarizedDataExtractionUpperLimit' will be calculated within each region defined by '2 * 2' in the source image and will be forwarded as a single new pixel in the destination image.
The resulting image therefore will have a width equal to 'input image width / 2' and a height equal to 'input image height / 2'
- Since
- 2.29.0
◆ prmMinimumValue
| prmMinimumValue = lib_mvIMPACT_acquire.prmMinimumValue |
The pixel with the minimum value will be extracted and forwarded from each region defined by '2 * 2'.
The resulting image therefore will have a width equal to 'input image width / 2' and a height equal to 'input image height / 2'
- Since
- 2.29.0
◆ prmPseudoColorRepresentation
| prmPseudoColorRepresentation = lib_mvIMPACT_acquire.prmPseudoColorRepresentation |
The angle of the maximum polarization and the degree of the polarization for every '2 * 2' region in the image will be calculated and the resulting value will then be mapped to the value range of and 8-bit HSL image.
The angle and the degree are calculated as described in mvIMPACT.acquire.prmExtractDegree and mvIMPACT.acquire.prmExtractAngle mode. Afterwards the angle is used as hue and the degree is used as saturation value in the HSL color representation and converted to RGB color representation.
The resulting image therefore will have a width equal to 'input image width / 2' and a height equal to 'input image height / 2'. From each 2 by 2 region (thus 4 input values) 2 output values will be calculated and placed into the resulting temporary HSL image. Afterwards this HSL image will transformed back to RGB to generate a pseudo-color image in mvIMPACT.acquire.ibpfRGB888Planar format.
- Note
- Pixels which are saturated or which don't show a signal at all will cause incorrect polarization data. This happens as a result of wrong relations between the different polarization directions which causes wrong values for the different stokes parameters resulting in incorrect pixel data. Different exposure settings might improve the result.
- Since
- 2.38.0
◆ prmVertical
| prmVertical = lib_mvIMPACT_acquire.prmVertical |
The pixels will be re-arranged one after the other thus the resulting image will have a width of 'input image width / 2' and a height of 'input image height * 2'.
The resulting image will consist of several small images sitting on top of each other. The first image will contain all the upper left pixels from each extraction ROI, the last image all the lower right pixels. The images in between will be extracted line by line and then row by row.
- Since
- 2.29.0
◆ PROPHANDLING_ACCESSTOKEN_CREATION_FAILED
| PROPHANDLING_ACCESSTOKEN_CREATION_FAILED = lib_mvIMPACT_acquire.PROPHANDLING_ACCESSTOKEN_CREATION_FAILED |
An access token object couldn't be created.
This can either happen, because the caller has not the rights required to create an access token or because the system runs very low on memory.
Deprecated: This error code currently is not used anywhere within this framework. It might be removed in a future version.
◆ PROPHANDLING_CANT_ALLOCATE_LIST
| PROPHANDLING_CANT_ALLOCATE_LIST = lib_mvIMPACT_acquire.PROPHANDLING_CANT_ALLOCATE_LIST |
This error will occur when the modules internal representation of the tree structure does not allow the allocation of a new list.
In this case either new list can't be allocated. The only way to solve this problem is to delete another list.
◆ PROPHANDLING_CANT_REGISTER_COMPONENT
| PROPHANDLING_CANT_REGISTER_COMPONENT = lib_mvIMPACT_acquire.PROPHANDLING_CANT_REGISTER_COMPONENT |
The referenced list has no space left to register this component at the desired position.
There might however be an empty space within the list where this element could be registered, but no more components can be registered at the end of this list.
◆ PROPHANDLING_CANT_SERIALIZE_DATA
| PROPHANDLING_CANT_SERIALIZE_DATA = lib_mvIMPACT_acquire.PROPHANDLING_CANT_SERIALIZE_DATA |
The user tried to save(serialize) a property list without having the right to do this.
◆ PROPHANDLING_COMPONENT_ALREADY_REGISTERED
| PROPHANDLING_COMPONENT_ALREADY_REGISTERED = lib_mvIMPACT_acquire.PROPHANDLING_COMPONENT_ALREADY_REGISTERED |
It has been tried to register the same component at twice in the same list.
◆ PROPHANDLING_COMPONENT_HAS_OWNER_ALREADY
| PROPHANDLING_COMPONENT_HAS_OWNER_ALREADY = lib_mvIMPACT_acquire.PROPHANDLING_COMPONENT_HAS_OWNER_ALREADY |
The specified component already has an owner.
The caller tried to assign an owner to a component that already has an owner. An owner once defined can't be modified anymore.
◆ PROPHANDLING_COMPONENT_ID_INVALID
| PROPHANDLING_COMPONENT_ID_INVALID = lib_mvIMPACT_acquire.PROPHANDLING_COMPONENT_ID_INVALID |
An invalid component within a list has been referenced.
◆ PROPHANDLING_COMPONENT_NO_CALLBACK_REGISTERED
| PROPHANDLING_COMPONENT_NO_CALLBACK_REGISTERED = lib_mvIMPACT_acquire.PROPHANDLING_COMPONENT_NO_CALLBACK_REGISTERED |
The user tried to modify a registered callback, but no callback has been registered for this component.
◆ PROPHANDLING_COMPONENT_NOT_FOUND
| PROPHANDLING_COMPONENT_NOT_FOUND = lib_mvIMPACT_acquire.PROPHANDLING_COMPONENT_NOT_FOUND |
The specified component could not be found.
◆ PROPHANDLING_IMPLEMENTATION_MISSING
| PROPHANDLING_IMPLEMENTATION_MISSING = lib_mvIMPACT_acquire.PROPHANDLING_IMPLEMENTATION_MISSING |
A feature that is not implemented so far has been requested.
The caller requested a feature, that hasn't been implemented so far. This error code is only provided for compatibility and will be set in very rare cases only.
◆ PROPHANDLING_INCOMPATIBLE_COMPONENTS
| PROPHANDLING_INCOMPATIBLE_COMPONENTS = lib_mvIMPACT_acquire.PROPHANDLING_INCOMPATIBLE_COMPONENTS |
The two involved components are not compatible.
An operation requiring two compatible components has been called with two components, which are not compatible.
◆ PROPHANDLING_INPUT_BUFFER_TOO_SMALL
| PROPHANDLING_INPUT_BUFFER_TOO_SMALL = lib_mvIMPACT_acquire.PROPHANDLING_INPUT_BUFFER_TOO_SMALL |
The user tried to read data into a user supplied storage location, but the buffer was too small to accommodate the result.
◆ PROPHANDLING_INVALID_FILE_CONTENT
| PROPHANDLING_INVALID_FILE_CONTENT = lib_mvIMPACT_acquire.PROPHANDLING_INVALID_FILE_CONTENT |
The user tried to use a file to update or create a component list, that does not contain valid data for this operation.
This e.g. might happen, if the file does not contain valid XML data or XML data that is not well formed.
◆ PROPHANDLING_INVALID_INPUT_PARAMETER
| PROPHANDLING_INVALID_INPUT_PARAMETER = lib_mvIMPACT_acquire.PROPHANDLING_INVALID_INPUT_PARAMETER |
A invalid input parameter has been passed to a function of this module.
In most cases this might be a unassigned pointer, where a valid pointer to a user defined storage location was expected.
◆ PROPHANDLING_INVALID_PROP_VALUE
| PROPHANDLING_INVALID_PROP_VALUE = lib_mvIMPACT_acquire.PROPHANDLING_INVALID_PROP_VALUE |
It has been tried to assign an invalid value to a property.
This can either happen if the value lies above or below the min. or max. value for a property or when it has been tried to write a value to a property, which is not in the properties translation dictionary (if it defines one).
To find out, which values are allowed for the property in question the user should
• Check if the property defines a translation dictionary.
• Check the allowed values within a translation dictionary if one is defined.
• Check the min and max value for properties, that define limits.
◆ PROPHANDLING_INVALID_PROP_VALUE_TYPE
| PROPHANDLING_INVALID_PROP_VALUE_TYPE = lib_mvIMPACT_acquire.PROPHANDLING_INVALID_PROP_VALUE_TYPE |
An invalid value has been passed to the property.
Although properties are quite tolerant regarding the allowed assignment for them some value types can't be used to write all properties. As an example assigning a float value to an integer property would result in this error.
Another reason for this error might be when a user tried to access e.g. a float property with functions meant to be used for int properties.
◆ PROPHANDLING_LAST_VALID_ERROR_CODE
| PROPHANDLING_LAST_VALID_ERROR_CODE = lib_mvIMPACT_acquire.PROPHANDLING_LAST_VALID_ERROR_CODE |
Defines the last valid error code value for the property module.
◆ PROPHANDLING_LIST_CANT_ACCESS_DATA
| PROPHANDLING_LIST_CANT_ACCESS_DATA = lib_mvIMPACT_acquire.PROPHANDLING_LIST_CANT_ACCESS_DATA |
The desired data can't be accessed or found.
During loading or saving data this error can occur e.g. if it has been tried to import a setting from a location where the desired setting couldn't be found. Another reason for this error might be that the current user is not allowed to perform a certain operation on the desired data (e.g. a user tries to delete a setting that is stored with global scope but does not have elevated access rights).
◆ PROPHANDLING_LIST_ENTRY_OCCUPIED
| PROPHANDLING_LIST_ENTRY_OCCUPIED = lib_mvIMPACT_acquire.PROPHANDLING_LIST_ENTRY_OCCUPIED |
The specified list index is occupied.
During the creation of a new component the caller tried the insert the newly created component into a list at a position already used to store another component.
◆ PROPHANDLING_LIST_ID_INVALID
| PROPHANDLING_LIST_ID_INVALID = lib_mvIMPACT_acquire.PROPHANDLING_LIST_ID_INVALID |
An invalid list has been referenced.
◆ PROPHANDLING_METHOD_INVALID_PARAM_LIST
| PROPHANDLING_METHOD_INVALID_PARAM_LIST = lib_mvIMPACT_acquire.PROPHANDLING_METHOD_INVALID_PARAM_LIST |
A method object has an invalid parameter list.
◆ PROPHANDLING_METHOD_PTR_INVALID
| PROPHANDLING_METHOD_PTR_INVALID = lib_mvIMPACT_acquire.PROPHANDLING_METHOD_PTR_INVALID |
The function pointer of the referenced method object is invalid.
◆ PROPHANDLING_NO_ERROR
| PROPHANDLING_NO_ERROR = lib_mvIMPACT_acquire.PROPHANDLING_NO_ERROR |
The operation has been executed successfully.
◆ PROPHANDLING_NO_MODIFY_SIZE_RIGHTS
| PROPHANDLING_NO_MODIFY_SIZE_RIGHTS = lib_mvIMPACT_acquire.PROPHANDLING_NO_MODIFY_SIZE_RIGHTS |
The caller can't modify the size of this component.
It has been tried to modify the size of this list or the number of values stored by a property, but the caller doesn't have the required right to do this.
This error will also be reported if the user tried to increase the number of values handled by a property above the maximum number of values it can handle. Therefore before resizing a property check if the new size might exceeds this maximum value by calling the appropriate function.
◆ PROPHANDLING_NO_READ_RIGHTS
| PROPHANDLING_NO_READ_RIGHTS = lib_mvIMPACT_acquire.PROPHANDLING_NO_READ_RIGHTS |
The caller has no read rights for this component.
It has been tried to read data from this component, but the caller has no read rights for this component.
◆ PROPHANDLING_NO_WRITE_RIGHTS
| PROPHANDLING_NO_WRITE_RIGHTS = lib_mvIMPACT_acquire.PROPHANDLING_NO_WRITE_RIGHTS |
The caller has no write rights for this component.
It has been tried to modify data of this component, but the caller has no write rights for this component.
◆ PROPHANDLING_NOT_A_LIST
| PROPHANDLING_NOT_A_LIST = lib_mvIMPACT_acquire.PROPHANDLING_NOT_A_LIST |
This component is not a list.
A list operation for this component has been called but this component does not reference a list.
◆ PROPHANDLING_NOT_A_METHOD
| PROPHANDLING_NOT_A_METHOD = lib_mvIMPACT_acquire.PROPHANDLING_NOT_A_METHOD |
This component is not a method.
A method operation for this component has been called but this component does not reference a method.
◆ PROPHANDLING_NOT_A_PROPERTY
| PROPHANDLING_NOT_A_PROPERTY = lib_mvIMPACT_acquire.PROPHANDLING_NOT_A_PROPERTY |
This component is not a property.
A property operation for this component has been called but this component does not reference a property.
◆ PROPHANDLING_PROP_TRANSLATION_TABLE_CORRUPTED
| PROPHANDLING_PROP_TRANSLATION_TABLE_CORRUPTED = lib_mvIMPACT_acquire.PROPHANDLING_PROP_TRANSLATION_TABLE_CORRUPTED |
The properties translation table has been corrupted.
The properties translation table has been corrupted for an unknown reason and can't be used anymore.
◆ PROPHANDLING_PROP_TRANSLATION_TABLE_NOT_DEFINED
| PROPHANDLING_PROP_TRANSLATION_TABLE_NOT_DEFINED = lib_mvIMPACT_acquire.PROPHANDLING_PROP_TRANSLATION_TABLE_NOT_DEFINED |
This property doesn't define a translation table.
The caller tried to modify a translation table, that hasn't been defined for this property.
◆ PROPHANDLING_PROP_VAL_ID_OUT_OF_BOUNDS
| PROPHANDLING_PROP_VAL_ID_OUT_OF_BOUNDS = lib_mvIMPACT_acquire.PROPHANDLING_PROP_VAL_ID_OUT_OF_BOUNDS |
Invalid value index.
The caller tried to read a value from an invalid index from a property. Most properties store one value only, thus the only valid positive value index will be 0 (some negative index values are reserved for special values like e.g. the min/max value of a property). However some properties might store more than one value, thus the max. allowed index might be higher. The highest index allowed will always be the value count of a property minus one for properties with the mvIMPACT.acquire.cfFixedSize flag set. Other properties will automatically adjust the size once the user writes to an index out of bounds.
◆ PROPHANDLING_PROP_VAL_TOO_LARGE
| PROPHANDLING_PROP_VAL_TOO_LARGE = lib_mvIMPACT_acquire.PROPHANDLING_PROP_VAL_TOO_LARGE |
A too large value has been passed.
One or more of the values the caller tried to write to the property are larger than the max. allowed value for this property.
◆ PROPHANDLING_PROP_VAL_TOO_SMALL
| PROPHANDLING_PROP_VAL_TOO_SMALL = lib_mvIMPACT_acquire.PROPHANDLING_PROP_VAL_TOO_SMALL |
A too small value has been passed.
One or more of the values the caller tried to write to the property are smaller than the min. allowed value for this property.
◆ PROPHANDLING_PROP_VALIDATION_FAILED
| PROPHANDLING_PROP_VALIDATION_FAILED = lib_mvIMPACT_acquire.PROPHANDLING_PROP_VALIDATION_FAILED |
The user tried to assign a value to a property, that is invalid.
This will result in a detailed error message in the log-file. This error might arise e.g. when a string property doesn't allow the string to contain numbers. In this case trying to set the properties value to 'blabla7bla' would cause this error.
◆ PROPHANDLING_SIZE_MISMATCH
| PROPHANDLING_SIZE_MISMATCH = lib_mvIMPACT_acquire.PROPHANDLING_SIZE_MISMATCH |
Different sized value buffers have been passed.
While trying to read value pairs the caller passed two different sized value buffers to a function while one is too small to hold all the information.
◆ PROPHANDLING_SWIG_ERROR
| PROPHANDLING_SWIG_ERROR = lib_mvIMPACT_acquire.PROPHANDLING_SWIG_ERROR |
This indicates an internal error occurred within the SWIG generated wrapper code, when working under Python.
◆ PROPHANDLING_UNSUPPORTED_OPERATION
| PROPHANDLING_UNSUPPORTED_OPERATION = lib_mvIMPACT_acquire.PROPHANDLING_UNSUPPORTED_OPERATION |
The user tried to execute an operation, which is not supported by the component he is referring to.
◆ PROPHANDLING_UNSUPPORTED_PARAMETER
| PROPHANDLING_UNSUPPORTED_PARAMETER = lib_mvIMPACT_acquire.PROPHANDLING_UNSUPPORTED_PARAMETER |
One or more of the specified parameters are not supported by the function.
This error might also be generated if a certain feature is not available on the current platform.
◆ PROPHANDLING_WRONG_PARAM_COUNT
| PROPHANDLING_WRONG_PARAM_COUNT = lib_mvIMPACT_acquire.PROPHANDLING_WRONG_PARAM_COUNT |
The number of parameters is incorrect.
This error might occur if the user called a function with a variable number of input or output parameters and the number of parameters passed to the function does not match the number of required parameters.
◆ pstDigitalSignal
| pstDigitalSignal = lib_mvIMPACT_acquire.pstDigitalSignal |
Changes on one or more digital inputs will trigger the output of the pulse or pulse sequence.
◆ pstPeriodically
| pstPeriodically = lib_mvIMPACT_acquire.pstPeriodically |
The output of a pulse or pulse sequence will be done periodically.
◆ pstRotaryDecoder
| pstRotaryDecoder = lib_mvIMPACT_acquire.pstRotaryDecoder |
The output of a rotary decoder will trigger the output of the pulse or pulse sequence.
◆ pt2DImage
| pt2DImage = lib_mvIMPACT_acquire.pt2DImage |
Color or monochrome (2D) image.
This request carries pixel data belonging to a single image and maybe some additional chunk data as well.
- Since
- 3.2.0
◆ ptChunkOnly
| ptChunkOnly = lib_mvIMPACT_acquire.ptChunkOnly |
Chunk data only.
This request carries chunk data as defined by the corresponding vision standards and no additional payload.
- See also
- Chunk Data Format
- Since
- 3.2.0
◆ ptGenDC
| ptGenDC = lib_mvIMPACT_acquire.ptGenDC |
GenDC data.
This request carries GenDC data as defined by the corresponding vision standards. In order to access the individual parts forming the full request either the buffer part related API can be used or the full GenDC container can be interpreted by using official header files or knowledge obtained by reading the GenICam™ GenDC standard.
- See also
- GenICam™ GenDC Format
- Since
- 3.2.0
◆ ptH264
| ptH264 = lib_mvIMPACT_acquire.ptH264 |
H.264 image data.
This request carries H.264 data belonging to a single image.
- Since
- 3.2.0
◆ ptJPEG
| ptJPEG = lib_mvIMPACT_acquire.ptJPEG |
JPEG image data.
This request carries JPEG data belonging to a single image.
- Since
- 3.2.0
◆ ptJPEG2000
| ptJPEG2000 = lib_mvIMPACT_acquire.ptJPEG2000 |
JPEG 2000 image data.
This request carries JPEG 2000 data belonging to a single image.
- Since
- 3.2.0
◆ ptMultiPart
| ptMultiPart = lib_mvIMPACT_acquire.ptMultiPart |
Multi-Part data.
This request carries multi-part data as defined by the corresponding vision standards and maybe some additional chunk data as well. In order to access the individual parts forming the full request the buffer part related API can be used.
- See also
- Multi-Part Format
- Since
- 3.2.0
◆ ptUnknown
| ptUnknown = lib_mvIMPACT_acquire.ptUnknown |
The framework is not aware of the data type of this request.
From the application perspective this can be handled as raw data. However the most likely reason for unknown data is that the request either does not contain any data right now or the last capture operation did fail for any reason.
- Since
- 3.2.0
◆ rimmAuto
| rimmAuto = lib_mvIMPACT_acquire.rimmAuto |
Automatic mode.
In this mode the driver will decide what kind of memory will be used, when it will be allocated and when it will be freed.
◆ rimmUser
| rimmUser = lib_mvIMPACT_acquire.rimmUser |
User supplied memory mode.
A request in this mode can capture data directly into a user supplied buffer.
The user can assign a buffer to each request that has been set into this mode. However some devices require the capture memory to be aligned thus then the buffer supplied by the user must be aligned to the requirements of the driver as well. To find out, which alignment is needed, the property captureBufferAlignment must be queried.
◆ ROOT_LIST
| ROOT_LIST = cvar.ROOT_LIST |
◆ rrCameraNotSupported
| rrCameraNotSupported = lib_mvIMPACT_acquire.rrCameraNotSupported |
The current camera description is not supported by the capture device.
This error code currently is relevant for frame grabbers only and might occur e.g. when selecting a MEDIUM CameraLink® camera description for a grabber, that only supports BASE cameras.
◆ rrDataAcquisitionNotSupported
| rrDataAcquisitionNotSupported = lib_mvIMPACT_acquire.rrDataAcquisitionNotSupported |
The device does not support capturing data in the current configuration.
This error code will occur if a request has been sent to a device that does not support the acquisition of data. This can e.g. be the case
- for GEV or U3V devices that do NOT support at least 1 streaming channel
- for U3V devices that have been opened with mvIMPACT.acquire.damRead access
- Since
- 2.5.0
◆ rrDeviceAccessLost
| rrDeviceAccessLost = lib_mvIMPACT_acquire.rrDeviceAccessLost |
The access to the device has been lost.
In this case no further access to the device will succeed. Only closing and re-opening the device will fix this problem. There can be numerous reasons for this error to occur, however the most likely one is that a device, that a timeout register inside the device, that needs to be refreshed constantly by the driver hasn't been refreshed during the timeout period. In this case the device will disconnect itself from the driver. This e.g. can happen if a network device is used and the application is operated in debug mode. For debugging the corresponding timeout register must be set to an appropriate value.
◆ rrError
| rrError = lib_mvIMPACT_acquire.rrError |
An error occurred during the processing of this request.
mvBlueFOX specific: This error typically results in some kind of USB transmission problem. The log-file will contain more information in that case.
◆ rrFrameCorrupt
| rrFrameCorrupt = lib_mvIMPACT_acquire.rrFrameCorrupt |
The device has reported that an image acquisition did fail on the device side thus BEFORE the data transfer.
This e.g. might happen if a device is running low on local memory or because of some other problem detected on the device itself. This result status is just meant for information. The associated buffer will not contain valid image data.
◆ rrFrameIncomplete
| rrFrameIncomplete = lib_mvIMPACT_acquire.rrFrameIncomplete |
An incomplete frame was transferred.
This can have several reasons, however the one most likely is that the transfer channel couldn't cope with the amount of data that was transmitted resulting in parts of the frame or in the worst case the complete frame being lost.
This e.g. might happen if several network devices transmit at the same time or a single device (e.g. connected to a PCI bus transfers more data than the PCI bus can pass to the receiving end until a temporary buffer on the device runs full. The log output will contain additional information.
If the information is available the property 'MissingData_pc' belonging to that request will contain information about the amount of data missing. Also some of the statistical properties will provide hints about how much data is lost. E.g. the properties 'MissingPacktesRecovered', 'RetransmitCount' and 'MissingDataAverage_pc' might be of interest here. Please note that not every property is supported by every device.
◆ rrInconsistentBufferContent
| rrInconsistentBufferContent = lib_mvIMPACT_acquire.rrInconsistentBufferContent |
A complete buffer has been delivered, but it did fail to pass the internal validation check.
This e.g. might happen with drivers that transmit buffers that contain more than a pure block of pixel data. Examples for this might be run-length encoded images, or buffers with additional information somewhere in the buffer that will be interpreted by the device driver. This error is most likely a result of a device that doesn't transfer data in the requested format. The log output will contain additional information.
◆ rrNoBufferAvailable
| rrNoBufferAvailable = lib_mvIMPACT_acquire.rrNoBufferAvailable |
No free buffer available to process this request.
To get more memory either some old requests should be unlocked or the size of the DMA memory (frame grabbers only) could be increased using the tools provided.
◆ rrNotEnoughMemory
| rrNotEnoughMemory = lib_mvIMPACT_acquire.rrNotEnoughMemory |
There is not enough memory available to the driver to process the current image request.
To get more memory either some old requests should be unlocked or the size of the DMA memory (frame grabbers only) could be increased using the tools provided.
Another possibility might be, that the process currently hosting the application cannot map all the capture memory requested by the application. In this case adding more memory to the system might solve the problem. Please note that when running on a 32 bit system no more than 2 GB of RAM can be used by a single process, thus applications demanding a lot of memory might still not run then. In this case only reducing the number of request buffers will help.
◆ rrOK
| rrOK = lib_mvIMPACT_acquire.rrOK |
This image request has been processed successfully.
◆ rrRequestAborted
| rrRequestAborted = lib_mvIMPACT_acquire.rrRequestAborted |
This request has been aborted either because there are no free internal buffers or the user itself caused this abort e.g.
by clearing the request queue.
◆ rrTimeout
| rrTimeout = lib_mvIMPACT_acquire.rrTimeout |
This image request resulted in a timeout.
No image has been captured during the allowed period of time.
◆ rrUnprocessibleRequest
| rrUnprocessibleRequest = lib_mvIMPACT_acquire.rrUnprocessibleRequest |
This request is not processible.
If this flag (the MSB) is set this either indicates that the current input parameters can't be used to capture an image (in that case the result will not be the MSB alone) or that an internal error occurred during the process of this request.
◆ rsBeingConfigured
| rsBeingConfigured = lib_mvIMPACT_acquire.rsBeingConfigured |
This mvIMPACT.acquire.Request is currently in configuration mode.
In this mode certain properties of the request object will become writeable, which e.g. will allow the user to pass a capture buffer to the request object. The user is now responsible for this request. Before this mvIMPACT.acquire.Request is not unlocked again it can't be used by the framework.
◆ rsCapturing
| rsCapturing = lib_mvIMPACT_acquire.rsCapturing |
This mvIMPACT.acquire.Request is currently being processed.
◆ rsIdle
| rsIdle = lib_mvIMPACT_acquire.rsIdle |
This mvIMPACT.acquire.Request is currently unused.
◆ rsReady
| rsReady = lib_mvIMPACT_acquire.rsReady |
This mvIMPACT.acquire.Request has been processed.
The user is now responsible for this request. Before this mvIMPACT.acquire.Request is not unlocked again it can't be used by the framework. A mvIMPACT.acquire.Request in this state can safely be processed by the user. Its data will remain valid until either the mvIMPACT.acquire.Request is unlocked by the user or the device is closed.
◆ rsWaiting
| rsWaiting = lib_mvIMPACT_acquire.rsWaiting |
This mvIMPACT.acquire.Request has been sent into the framework's image request queue and currently awaits processing.
◆ rtctrlModeRun
| rtctrlModeRun = lib_mvIMPACT_acquire.rtctrlModeRun |
RTC switched on and NOT editable.
◆ rtctrlModeRunRestart
| rtctrlModeRunRestart = lib_mvIMPACT_acquire.rtctrlModeRunRestart |
RTC switched on and restart after changes.
◆ rtctrlModeStop
| rtctrlModeStop = lib_mvIMPACT_acquire.rtctrlModeStop |
RTC switched off and editable.
◆ rtctrlProgExposeReset
| rtctrlProgExposeReset = lib_mvIMPACT_acquire.rtctrlProgExposeReset |
Reset internal expose signal of the sensor controller.
◆ rtctrlProgExposeSet
| rtctrlProgExposeSet = lib_mvIMPACT_acquire.rtctrlProgExposeSet |
Set internal expose signal of the sensor controller.
◆ rtctrlProgFrameNrReset
| rtctrlProgFrameNrReset = lib_mvIMPACT_acquire.rtctrlProgFrameNrReset |
Reset internal sensor frame counter.
◆ rtctrlProgJumpLoc
| rtctrlProgJumpLoc = lib_mvIMPACT_acquire.rtctrlProgJumpLoc |
Jump to location.
◆ rtctrlProgJumpLocOnNotZero
| rtctrlProgJumpLocOnNotZero = lib_mvIMPACT_acquire.rtctrlProgJumpLocOnNotZero |
Jump to location if a certain register differs from zero.
◆ rtctrlProgJumpLocOnZero
| rtctrlProgJumpLocOnZero = lib_mvIMPACT_acquire.rtctrlProgJumpLocOnZero |
Jump to location if a certain register contains zero.
◆ rtctrlProgNop
| rtctrlProgNop = lib_mvIMPACT_acquire.rtctrlProgNop |
Do nothing.
◆ rtctrlProgRegisterAdd
| rtctrlProgRegisterAdd = lib_mvIMPACT_acquire.rtctrlProgRegisterAdd |
Add a constant value to a register.
◆ rtctrlProgRegisterSet
| rtctrlProgRegisterSet = lib_mvIMPACT_acquire.rtctrlProgRegisterSet |
Set a registers value.
◆ rtctrlProgRegisterSub
| rtctrlProgRegisterSub = lib_mvIMPACT_acquire.rtctrlProgRegisterSub |
Subtract a constant value from a register.
◆ rtctrlProgSetDigout
| rtctrlProgSetDigout = lib_mvIMPACT_acquire.rtctrlProgSetDigout |
Set digital outputs.
◆ rtctrlProgTriggerReset
| rtctrlProgTriggerReset = lib_mvIMPACT_acquire.rtctrlProgTriggerReset |
Reset internal trigger signal of the sensor controller.
◆ rtctrlProgTriggerSet
| rtctrlProgTriggerSet = lib_mvIMPACT_acquire.rtctrlProgTriggerSet |
Set internal trigger signal of the sensor controller.
◆ rtctrlProgWaitClocks
| rtctrlProgWaitClocks = lib_mvIMPACT_acquire.rtctrlProgWaitClocks |
Wait for n clocks.
◆ rtctrlProgWaitDigin
| rtctrlProgWaitDigin = lib_mvIMPACT_acquire.rtctrlProgWaitDigin |
Wait for digital inputs.
◆ rtmFullResolution
| rtmFullResolution = lib_mvIMPACT_acquire.rtmFullResolution |
Request transmission of an image in full resolution.
◆ scAnalogue
| scAnalogue = lib_mvIMPACT_acquire.scAnalogue |
The scan clock is generated by genlocking on horizontal sync.
(HD) signal.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
ADVANTAGES:
- very small jitter (typically around some 100 pico seconds) -> suitable for high pixel clock (>20Mhz)
- for matching HD freq. values (with respect to the signal sent by the camera) this will produce results almost as good as when working with an external clock signal(less scan artifacts)
DISADVANTAGES:
- slow reaction time -> not suitable for fast channel switching
- not suitable for signals with a pixel clock below 12 MHz
◆ scAuto
| scAuto = lib_mvIMPACT_acquire.scAuto |
The cameras clock signal is used.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
If the property pixelClockOutput in the camera description is either set to mvIMPACT.acquire.ceseFallingEdge or mvIMPACT.acquire.ceseRisingEdge. Otherwise mvIMPACT.acquire.scAnalogue is used for mvTITAN-RGB and mvTITAN-G1 devices and mvIMPACT.acquire.scDigital for mvGAMMA-G devices. Other devices currently do not support this feature.
◆ scDigital
| scDigital = lib_mvIMPACT_acquire.scDigital |
The scan clock is generated digitally.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
ADVANTAGE:
- locked after a single line, therefore this mode is very useful for fast channel switching
DISADVANTAGE:
- bigger jitter as the analogue mode(<10ns), therefore not suitable for cameras with a pixel clock higher than about 20Mhz
◆ sfCreateMissingEntries
| sfCreateMissingEntries = lib_mvIMPACT_acquire.sfCreateMissingEntries |
If set ALL entries in the store data will be created.
When loading a setting not only the current lists data will be updated, but also properties, lists or data, which is found in the storage location but not in the setting to update will be added to the setting as well.
◆ sfDefault
| sfDefault = lib_mvIMPACT_acquire.sfDefault |
A dummy flag to specify the default behaviour.
Store/load operations will done in XML format in this case.
◆ sfDontProcessDefault
| sfDontProcessDefault = lib_mvIMPACT_acquire.sfDontProcessDefault |
Specifies if the 'is-default' flag for components shall be ignored during import/export operations.
If this flag is set the 'is-default' flag will not be processed during this import/export operation.
- Note
- This flag is ignored, if mvIMPACT.acquire.sfNative is specified.
◆ sfFile
| sfFile = lib_mvIMPACT_acquire.sfFile |
Stores/loads the setting in/from an XML file.
If this flag is specified the data will be imported/exported from/to an XML file.
◆ sfIgnoreBasicData
| sfIgnoreBasicData = lib_mvIMPACT_acquire.sfIgnoreBasicData |
Specifies if basic data shall be processed.
For e.g. settings it's not necessary to import/export information about the value type for properties or the size of lists etc. as this information is available internally anyway. So interface functions dealing with settings should specify this flag in any case.
◆ sfIgnoreInvisible
| sfIgnoreInvisible = lib_mvIMPACT_acquire.sfIgnoreInvisible |
Specifies if invisible components shall be processed.
When invisible data doesn't need to be processed this flag can be specified. Invisible components do not influence the current systems behaviour.
- Note
- This feature is currently only supported for output operations and is ignored for input operations.
◆ sfIgnorePropData
| sfIgnorePropData = lib_mvIMPACT_acquire.sfIgnorePropData |
If set data for properties will no be updated.
If this flag is set the values stored by the property will be ignored for this import/export operation.
- Note
- This flag is ignored, if mvIMPACT.acquire.sfNative is specified.
◆ sfNative
| sfNative = lib_mvIMPACT_acquire.sfNative |
Stores/loads the setting in/from a platform dependent location.
Under Windows© the Registry will be used to as a platform dependent location, while under other platforms an XML file will be processed in the path specified as the settings name.
- Note
- Please note, that using this flag will introduce platform dependency. E.g. specifying this flag under Linux will process XML data, while under Windows© the Registry will be used. This is why A call to a load function with this flag with the corresponding XML file in the applications directory might succeed under Linux while it fails under Windows©.
◆ sfProcessDisplayName
| sfProcessDisplayName = lib_mvIMPACT_acquire.sfProcessDisplayName |
If set the display name will be processed.
If this flag is set the display name will be processed for this import/export operation.
- Note
- This flag is ignored, if mvIMPACT.acquire.sfNative is specified.
◆ sfProcessDocString
| sfProcessDocString = lib_mvIMPACT_acquire.sfProcessDocString |
If set the documentation string will be processed.
If this flag is set the documentation string will be processed for this import/export operation.
- Note
- This flag is ignored, if mvIMPACT.acquire.sfNative is specified.
◆ sfProcessGenICamSequencerData
| sfProcessGenICamSequencerData = lib_mvIMPACT_acquire.sfProcessGenICamSequencerData |
Processes GenICam sequencer set related data during a storage operation.
- Note
- This flag will affect devices operated in GenICam interface layout only!
- Attention
- Settings stored this way cannot be loaded on systems running Impact Acquire versions smaller than 2.28.0.
- Since
- 2.28.0
◆ sfProcessGenICamUserSetData
| sfProcessGenICamUserSetData = lib_mvIMPACT_acquire.sfProcessGenICamUserSetData |
Processes GenICam user set related data during a storage operation.
- Note
- This flag will affect devices operated in GenICam interface layout only!
- Attention
- Settings stored this way cannot be loaded on systems running Impact Acquire versions smaller than 2.28.0.
- Since
- 2.28.0
◆ sfProcessInheritance
| sfProcessInheritance = lib_mvIMPACT_acquire.sfProcessInheritance |
If set the lists inheritance relationship will be processed.
If this flag is set the inheritance relationship between lists will be processed for the current import/export operation.
- Note
- Limitations:
- derived lists must appear in a list after the parent list. So if a list is derived from another list, it has to be registered with a higher index either in the same list as the parent or in a list with a higher index then the list holding the parent in a top level list.
Example for a legal structure:A|-B| |-parent| |-child|-C| |-child|-child
Example for illegal structures:orA|-child|-parentA|-B| |-child|-parent - this feature is not available when mvIMPACT.acquire.sfNative is specified.
- derived lists must appear in a list after the parent list. So if a list is derived from another list, it has to be registered with a higher index either in the same list as the parent or in a list with a higher index then the list holding the parent in a top level list.
◆ sfProcessPropConstantsDict
| sfProcessPropConstantsDict = lib_mvIMPACT_acquire.sfProcessPropConstantsDict |
If set the defined constants for properties will be processed.
If this flag is set the defined constants for properties will be processed for this import/export operation.
◆ sfProcessPropTranslationDict
| sfProcessPropTranslationDict = lib_mvIMPACT_acquire.sfProcessPropTranslationDict |
If set properties translation dictionaries will be processed for this import/export operation.
This option forces the function to process the translation dictionaries, which might be assigned to properties.
◆ sfProcessReadOnlyComponents
| sfProcessReadOnlyComponents = lib_mvIMPACT_acquire.sfProcessReadOnlyComponents |
If set read-only components will be processed for this import/export operation.
When importing, exporting or updating a component list components with the mvIMPACT.acquire.cfWriteAccess not set will be ignored.
◆ sfRAM
| sfRAM = lib_mvIMPACT_acquire.sfRAM |
Stores/loads the setting in/from RAM file.
If this flag is specified the data will be imported/exported from/to RAM. Data stored this way should be freed when no longer needed to avoid a waste of memory. However when shutting down Impact Acquire completely (e.g. when unloading the mvPropHandling library from memory all memory allocated by settings stored this way will be freed automatically).
- Note
- This flag must not be combined with mvIMPACT.acquire.sfNative or mvIMPACT.acquire.sfFile.
- Since
- 2.19.0
◆ sfRaw
| sfRaw = lib_mvIMPACT_acquire.sfRaw |
Stores/loads the setting in raw mode.
- Note
- Under Windows© this mode only works in connection with the mvIMPACT.acquire.sfNative flag. In that case an arbitrary hive from the registry can be used to create a tree of lists and properties. This only makes sense for very special applications and therefore is not needed to write applications, that load and store current settings.
◆ sfVolatile
| sfVolatile = lib_mvIMPACT_acquire.sfVolatile |
Stores lists volatile.
under Windows© when the mvIMPACT.acquire.sfNative flag is set this will store the component list as a volatile key in the Registry. This means that the data will remain in the Registry until the system is shut down.
◆ sGlobal
| sGlobal = lib_mvIMPACT_acquire.sGlobal |
Save the setting as global as possible.
◆ simCubic
| simCubic = lib_mvIMPACT_acquire.simCubic |
Cubic interpolation.
◆ simLinear
| simLinear = lib_mvIMPACT_acquire.simLinear |
Linear interpolation.
◆ simNearestNeighbor
| simNearestNeighbor = lib_mvIMPACT_acquire.simNearestNeighbor |
Nearest neighbor interpolation (default).
◆ slFile
| slFile = lib_mvIMPACT_acquire.slFile |
Stores/loads the setting in/from an XML file.
Setting data will be imported/exported from/to an XML file.
◆ slNative
| slNative = lib_mvIMPACT_acquire.slNative |
Stores/loads the setting in/from a platform dependent location.
Under Windows© the Registry will be used to as a platform dependent location, while under other platforms an XML file will be processed in the path specified as the settings name.
- Note
- Please note, that using this mode will introduce platform dependency. E.g. specifying this mode under Linux will process XML data, while under Windows© the Registry will be used. This is why A call to a load function with this mode with the corresponding XML file in the applications directory might succeed under Linux while it fails under Windows©.
◆ slNative_Raw
| slNative_Raw = lib_mvIMPACT_acquire.slNative_Raw |
Stores/loads the setting in/from a platform dependent location.
Under Windows© the Registry will be used to as a platform dependent location, while under other platforms an XML file will be processed in the path specified as the settings name.
- Note
- Please note, that using this mode will introduce platform dependency. E.g. specifying this mode under Linux will process XML data, while under Windows© the Registry will be used. This is why A call to a load function with this mode with the corresponding XML file in the applications directory might succeed under Linux while it fails under Windows©.
- Under Windows© with this mode an arbitrary hive from the registry can be used to create a tree of lists and properties. This only makes sense for very special applications and therefore is not needed to write applications, that load and store current settings.
◆ slRAM
| slRAM = lib_mvIMPACT_acquire.slRAM |
Stores/loads the setting in/from RAM file.
Setting data will be stored in the RAM of the current process. Data stored this way should be freed when no longer needed to avoid a waste of memory. However when shutting down Impact Acquire completely (e.g. when unloading the mvPropHandling library from memory all memory allocated by settings stored this way will be freed automatically).
◆ smIgnoreLists
| smIgnoreLists = cvar.smIgnoreLists |
◆ smIgnoreMethods
| smIgnoreMethods = cvar.smIgnoreMethods |
◆ smIgnoreProperties
| smIgnoreProperties = cvar.smIgnoreProperties |
◆ smOff
| smOff = lib_mvIMPACT_acquire.smOff |
The scaler is switched off (default).
◆ smOn
| smOn = lib_mvIMPACT_acquire.smOn |
The scaler is switched on.
◆ ssITU601
| ssITU601 = lib_mvIMPACT_acquire.ssITU601 |
720 x 576 Pixels for 50 Hz standard cameras, 720 x 480 Pixels for 60 Hz standard cameras.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ sspBinningHorizontal
| sspBinningHorizontal = lib_mvIMPACT_acquire.sspBinningHorizontal |
Requests the BinningHorizontal property to be modified in a user selected sequencer set.
- Since
- 2.45.0, requires firmware version >= 2.44
◆ sspBinningVertical
| sspBinningVertical = lib_mvIMPACT_acquire.sspBinningVertical |
Requests the BinningVertical property to be modified in a user selected sequencer set.
- Since
- 2.45.0, requires firmware version >= 2.44
◆ sspCounterDuration_Counter1
| sspCounterDuration_Counter1 = lib_mvIMPACT_acquire.sspCounterDuration_Counter1 |
Requests the CounterDuration[CounterSelector=Counter1] property to be modified in a user selected sequencer set.
◆ sspCounterDuration_Counter2
| sspCounterDuration_Counter2 = lib_mvIMPACT_acquire.sspCounterDuration_Counter2 |
Requests the CounterDuration[CounterSelector=Counter2] property to be modified in a user selected sequencer set.
◆ sspCounterDuration_Counter3
| sspCounterDuration_Counter3 = lib_mvIMPACT_acquire.sspCounterDuration_Counter3 |
Requests the CounterDuration[CounterSelector=Counter3] property to be modified in a user selected sequencer set.
◆ sspCounterDuration_Counter4
| sspCounterDuration_Counter4 = lib_mvIMPACT_acquire.sspCounterDuration_Counter4 |
Requests the CounterDuration[CounterSelector=Counter4] property to be modified in a user selected sequencer set.
◆ sspCounterDuration_Counter5
| sspCounterDuration_Counter5 = lib_mvIMPACT_acquire.sspCounterDuration_Counter5 |
Requests the CounterDuration[CounterSelector=Counter5] property to be modified in a user selected sequencer set.
◆ sspCounterDuration_Counter6
| sspCounterDuration_Counter6 = lib_mvIMPACT_acquire.sspCounterDuration_Counter6 |
Requests the CounterDuration[CounterSelector=Counter6] property to be modified in a user selected sequencer set.
◆ sspCounterDuration_Counter7
| sspCounterDuration_Counter7 = lib_mvIMPACT_acquire.sspCounterDuration_Counter7 |
Requests the CounterDuration[CounterSelector=Counter7] property to be modified in a user selected sequencer set.
◆ sspCounterDuration_Counter8
| sspCounterDuration_Counter8 = lib_mvIMPACT_acquire.sspCounterDuration_Counter8 |
Requests the CounterDuration[CounterSelector=Counter8] property to be modified in a user selected sequencer set.
◆ sspDecimationHorizontal
| sspDecimationHorizontal = lib_mvIMPACT_acquire.sspDecimationHorizontal |
Requests the DecimationHorizontal property to be modified in a user selected sequencer set.
- Since
- 2.45.0, requires firmware version >= 2.44
◆ sspDecimationVertical
| sspDecimationVertical = lib_mvIMPACT_acquire.sspDecimationVertical |
Requests the DecimationVertical property to be modified in a user selected sequencer set.
- Since
- 2.45.0, requires firmware version >= 2.44
◆ sspExposureTime
| sspExposureTime = lib_mvIMPACT_acquire.sspExposureTime |
Requests the ExposureTime property to be modified in a user selected sequencer set.
◆ sspGain_AnalogAll
| sspGain_AnalogAll = lib_mvIMPACT_acquire.sspGain_AnalogAll |
Requests the Gain[GainSelector=AnalogAll] property to be modified in a user selected sequencer set.
◆ sspGain_AnalogBlue
| sspGain_AnalogBlue = lib_mvIMPACT_acquire.sspGain_AnalogBlue |
Requests the Gain[GainSelector=AnalogBlue] property to be modified in a user selected sequencer set.
◆ sspGain_AnalogGreen
| sspGain_AnalogGreen = lib_mvIMPACT_acquire.sspGain_AnalogGreen |
Requests the Gain[GainSelector=AnalogGreen] property to be modified in a user selected sequencer set.
◆ sspGain_AnalogRed
| sspGain_AnalogRed = lib_mvIMPACT_acquire.sspGain_AnalogRed |
Requests the Gain[GainSelector=AnalogRed] property to be modified in a user selected sequencer set.
◆ sspGain_AnalogTap1
| sspGain_AnalogTap1 = lib_mvIMPACT_acquire.sspGain_AnalogTap1 |
Requests the Gain[GainSelector=AnalogTap1] property to be modified in a user selected sequencer set.
◆ sspGain_AnalogTap2
| sspGain_AnalogTap2 = lib_mvIMPACT_acquire.sspGain_AnalogTap2 |
Requests the Gain[GainSelector=AnalogTap2] property to be modified in a user selected sequencer set.
◆ sspGain_AnalogTap3
| sspGain_AnalogTap3 = lib_mvIMPACT_acquire.sspGain_AnalogTap3 |
Requests the Gain[GainSelector=AnalogTap3] property to be modified in a user selected sequencer set.
◆ sspGain_AnalogTap4
| sspGain_AnalogTap4 = lib_mvIMPACT_acquire.sspGain_AnalogTap4 |
Requests the Gain[GainSelector=AnalogTap4] property to be modified in a user selected sequencer set.
◆ sspHeight
| sspHeight = lib_mvIMPACT_acquire.sspHeight |
Requests the Height property to be modified in a user selected sequencer set.
- Since
- 2.36.0, requires firmware version >= 2.36
◆ sspOffsetX
| sspOffsetX = lib_mvIMPACT_acquire.sspOffsetX |
Requests the OffsetX property to be modified in a user selected sequencer set.
- Since
- 2.34.0, requires firmware version >= 2.35
◆ sspOffsetY
| sspOffsetY = lib_mvIMPACT_acquire.sspOffsetY |
Requests the OffsetY property to be modified in a user selected sequencer set.
- Since
- 2.34.0, requires firmware version >= 2.35
◆ sspWidth
| sspWidth = lib_mvIMPACT_acquire.sspWidth |
Requests the Width property to be modified in a user selected sequencer set.
- Since
- 2.36.0, requires firmware version >= 2.36
◆ ssSquare
| ssSquare = lib_mvIMPACT_acquire.ssSquare |
768 x 576 Pixels for 50 Hz standard cameras, 640 x 480 Pixels for 60 Hz standard cameras.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ ssUser
| ssUser = lib_mvIMPACT_acquire.ssUser |
The user can define scan rate and camera AOI.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
◆ sUser
| sUser = lib_mvIMPACT_acquire.sUser |
Save the setting in a user specific location.
◆ tmOnFallingEdge
| tmOnFallingEdge = lib_mvIMPACT_acquire.tmOnFallingEdge |
A falling edge will trigger the event.
◆ tmOnRisingEdge
| tmOnRisingEdge = lib_mvIMPACT_acquire.tmOnRisingEdge |
A rising edge will trigger the event.
◆ udarFull
| udarFull = lib_mvIMPACT_acquire.udarFull |
Combines all other flags.
◆ udarPassword
| udarPassword = lib_mvIMPACT_acquire.udarPassword |
A password is needed to modify this entry.
Even if mvIMPACT.acquire.udarWrite is specified the user can only modify this entry if the correct password has been set.
◆ udarRead
| udarRead = lib_mvIMPACT_acquire.udarRead |
The user has read rights for this entry.
◆ udarRW
| udarRW = lib_mvIMPACT_acquire.udarRW |
Just combines mvIMPACT.acquire.udarRead and mvIMPACT.acquire.udarWrite.
◆ udarWrite
| udarWrite = lib_mvIMPACT_acquire.udarWrite |
The user has principle write rights for this entry.
If mvIMPACT.acquire.udarPassword is not set for this entry or the corresponding password has been set correctly, the user can modify the corresponding entry.
◆ udrbKeepCachedData
| udrbKeepCachedData = lib_mvIMPACT_acquire.udrbKeepCachedData |
Keep the data currently buffered in the properties describing the user data.
When the user data has been modified on another machine this will result in a loss of that data once this buffered data is written back to the devices non-volatile memory.
◆ udrbUpdateFromDeviceData
| udrbUpdateFromDeviceData = lib_mvIMPACT_acquire.udrbUpdateFromDeviceData |
Updates the properties describing the user data with the fresh data as read from the devices non-volatile memory.
This might result in the loss of data that has been edited but NOT written to the devices non-volatile memory if this data differs from the current data stored in the devices non-volatile memory.
◆ urDevAlreadyInUse
| urDevAlreadyInUse = lib_mvIMPACT_acquire.urDevAlreadyInUse |
The requested update couldn't be performed as the device is already in use.
If another (or even the same) process uses the device, this hardware update can't be performed. To perform the requested update this device needs to be closed.
◆ urGetUserDataReadError
| urGetUserDataReadError = lib_mvIMPACT_acquire.urGetUserDataReadError |
Reading user data from an mvIMPACT.acquire.Device failed.
◆ urNoUpdatePerformed
| urNoUpdatePerformed = lib_mvIMPACT_acquire.urNoUpdatePerformed |
No update has been performed for this mvIMPACT.acquire.Device.
No update has been performed in the current process since this device driver has been loaded in the current process address space.
◆ urSetDevID
| urSetDevID = lib_mvIMPACT_acquire.urSetDevID |
The mvIMPACT.acquire.Device is currently setting device ID.
◆ urSetDevIDError
| urSetDevIDError = lib_mvIMPACT_acquire.urSetDevIDError |
The mvIMPACT.acquire.Device signaled an error when setting device ID.
◆ urSetDevIDInvalidID
| urSetDevIDInvalidID = lib_mvIMPACT_acquire.urSetDevIDInvalidID |
An invalid device ID has been specified.
Valid device IDs are within 0 and 250 including the upper and lower limit.
◆ urSetDevIDOK
| urSetDevIDOK = lib_mvIMPACT_acquire.urSetDevIDOK |
The mvIMPACT.acquire.Device has successfully been assigned a new ID.
◆ urSetUserDataSizeError
| urSetUserDataSizeError = lib_mvIMPACT_acquire.urSetUserDataSizeError |
Size Error in writing User Data to mvIMPACT.acquire.Device .
◆ urSetUserDataWriteError
| urSetUserDataWriteError = lib_mvIMPACT_acquire.urSetUserDataWriteError |
Write Error in writing User Data to mvIMPACT.acquire.Device .
◆ urSetUserDataWriteOK
| urSetUserDataWriteOK = lib_mvIMPACT_acquire.urSetUserDataWriteOK |
Writing user data to mvIMPACT.acquire.Device was successful.
◆ urUpdateFW
| urUpdateFW = lib_mvIMPACT_acquire.urUpdateFW |
The mvIMPACT.acquire.Device is currently updating firmware.
◆ urUpdateFWError
| urUpdateFWError = lib_mvIMPACT_acquire.urUpdateFWError |
The mvIMPACT.acquire.Device indicates an error during updating firmware.
◆ urUpdateFWOK
| urUpdateFWOK = lib_mvIMPACT_acquire.urUpdateFWOK |
The mvIMPACT.acquire.Device indicates that the firmware has been updated successfully.
◆ urVerifyFWError
| urVerifyFWError = lib_mvIMPACT_acquire.urVerifyFWError |
The mvIMPACT.acquire.Device indicates an error during verifying firmware.
◆ urVerifyFWOK
| urVerifyFWOK = lib_mvIMPACT_acquire.urVerifyFWOK |
The mvIMPACT.acquire.Device indicates that the firmware has been verified successfully.
◆ vcH264
| vcH264 = lib_mvIMPACT_acquire.vcH264 |
H264.
Recommend file extension for this codec: .mp4
Supported input pixel formats for this video codec:
◆ vcH265
| vcH265 = lib_mvIMPACT_acquire.vcH265 |
H265.
Recommend file extension for this codec: .mp4
Supported input pixel formats for this video codec:
◆ vcMPEG2
| vcMPEG2 = lib_mvIMPACT_acquire.vcMPEG2 |
MPEG2.
Recommend file extension for this codec: .m2v
Supported input pixel formats for this video codec:
◆ vditALL
| vditALL = lib_mvIMPACT_acquire.vditALL |
Will capture all supported image formats.
◆ vditBMP
| vditBMP = lib_mvIMPACT_acquire.vditBMP |
Will capture BMP files.
◆ vditJPG
| vditJPG = lib_mvIMPACT_acquire.vditJPG |
Will capture JPG files.
- Note
- This requires the FreeImage (see http://freeimage.sourceforge.net/) library being present on the target system. See Use Cases section of the mvVirtualDriver for details.
- Since
- 2.11.9
◆ vditNone
| vditNone = lib_mvIMPACT_acquire.vditNone |
Will capture none of the recognized image formats.
◆ vditPGM
| vditPGM = lib_mvIMPACT_acquire.vditPGM |
Will capture PGM files.
◆ vditPNG
| vditPNG = lib_mvIMPACT_acquire.vditPNG |
Will capture PNG files.
- Note
- This requires the FreeImage (see http://freeimage.sourceforge.net/) library being present on the target system. See Use Cases section of the mvVirtualDriver for details.
- Since
- 2.11.9
◆ vditTIFF
| vditTIFF = lib_mvIMPACT_acquire.vditTIFF |
Will capture TIFF files.
- Note
- This requires the FreeImage (see http://freeimage.sourceforge.net/) library being present on the target system. See Use Cases section of the mvVirtualDriver for details.
- Since
- 2.11.9
◆ vdtmBayerWhiteBalanceTestImage
| vdtmBayerWhiteBalanceTestImage = lib_mvIMPACT_acquire.vdtmBayerWhiteBalanceTestImage |
Will generate a still Bayer test pattern that can be used for white balancing.
◆ vdtmEmptyMonoBuffer
| vdtmEmptyMonoBuffer = lib_mvIMPACT_acquire.vdtmEmptyMonoBuffer |
Will just allocate but not initialize a mono buffer.
◆ vdtmHorizontalBayer12Packed_V1Ramp
| vdtmHorizontalBayer12Packed_V1Ramp = lib_mvIMPACT_acquire.vdtmHorizontalBayer12Packed_V1Ramp |
Will generate a horizontal Bayer ramp with pixel format mvIMPACT.acquire.ibpfMono12Packed_V1.
- Since
- 2.5.2
◆ vdtmHorizontalBayer12Packed_V2Ramp
| vdtmHorizontalBayer12Packed_V2Ramp = lib_mvIMPACT_acquire.vdtmHorizontalBayer12Packed_V2Ramp |
Will generate a horizontal Bayer ramp with pixel format mvIMPACT.acquire.ibpfMono12Packed_V2.
- Since
- 2.5.2
◆ vdtmHorizontalMono12Packed_V1Ramp
| vdtmHorizontalMono12Packed_V1Ramp = lib_mvIMPACT_acquire.vdtmHorizontalMono12Packed_V1Ramp |
Will generate a horizontal mono ramp with pixel format mvIMPACT.acquire.ibpfMono12Packed_V1.
- Since
- 2.5.0
◆ vdtmHorizontalMono12Packed_V2Ramp
| vdtmHorizontalMono12Packed_V2Ramp = lib_mvIMPACT_acquire.vdtmHorizontalMono12Packed_V2Ramp |
Will generate a horizontal mono ramp with pixel format mvIMPACT.acquire.ibpfMono12Packed_V2.
◆ vdtmHorizontalMonoRamp
| vdtmHorizontalMonoRamp = lib_mvIMPACT_acquire.vdtmHorizontalMonoRamp |
Will generate a horizontal mono ramp.
◆ vdtmHotAndColdPixelTestImageBayer
| vdtmHotAndColdPixelTestImageBayer = lib_mvIMPACT_acquire.vdtmHotAndColdPixelTestImageBayer |
Will generate a still Bayer test pattern for hot and cold pixel calibration.
- Since
- 2.31.0
◆ vdtmHotAndColdPixelTestImageRGB888Packed
| vdtmHotAndColdPixelTestImageRGB888Packed = lib_mvIMPACT_acquire.vdtmHotAndColdPixelTestImageRGB888Packed |
Will generate a still RGB8 test pattern for hot and cold pixel calibration.
- Since
- 2.33.0
◆ vdtmImageDirectory
| vdtmImageDirectory = lib_mvIMPACT_acquire.vdtmImageDirectory |
Will capture images from a user supplied directory.
◆ vdtmLeakyPixelTestImageMono8Bayer
| vdtmLeakyPixelTestImageMono8Bayer = lib_mvIMPACT_acquire.vdtmLeakyPixelTestImageMono8Bayer |
Will generate a still 8 bit Bayer test pattern for leaky pixel calibration.
◆ vdtmMovingBayerDataRamp
| vdtmMovingBayerDataRamp = lib_mvIMPACT_acquire.vdtmMovingBayerDataRamp |
Will generate a moving Bayer test pattern.
◆ vdtmMovingBGR888PackedImage
| vdtmMovingBGR888PackedImage = lib_mvIMPACT_acquire.vdtmMovingBGR888PackedImage |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfBGR888Packed.
◆ vdtmMovingBGRPacked_V2Image
| vdtmMovingBGRPacked_V2Image = lib_mvIMPACT_acquire.vdtmMovingBGRPacked_V2Image |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfBGR101010Packed_V2.
◆ vdtmMovingMonoRamp
| vdtmMovingMonoRamp = lib_mvIMPACT_acquire.vdtmMovingMonoRamp |
Will generate a moving horizontal test pattern with a mono pixel format.
◆ vdtmMovingRGB101010PackedImage
| vdtmMovingRGB101010PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGB101010PackedImage |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB101010Packed.
◆ vdtmMovingRGB121212PackedImage
| vdtmMovingRGB121212PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGB121212PackedImage |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB121212Packed.
◆ vdtmMovingRGB141414PackedImage
| vdtmMovingRGB141414PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGB141414PackedImage |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB141414Packed.
◆ vdtmMovingRGB161616PackedImage
| vdtmMovingRGB161616PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGB161616PackedImage |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB161616Packed.
◆ vdtmMovingRGB888PackedImage
| vdtmMovingRGB888PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGB888PackedImage |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB888Packed.
◆ vdtmMovingRGB888PlanarImage
| vdtmMovingRGB888PlanarImage = lib_mvIMPACT_acquire.vdtmMovingRGB888PlanarImage |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGB888Planar.
- Since
- 2.17.0
◆ vdtmMovingRGBx888PackedImage
| vdtmMovingRGBx888PackedImage = lib_mvIMPACT_acquire.vdtmMovingRGBx888PackedImage |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGBx888Packed.
◆ vdtmMovingRGBx888PlanarImage
| vdtmMovingRGBx888PlanarImage = lib_mvIMPACT_acquire.vdtmMovingRGBx888PlanarImage |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfRGBx888Planar.
◆ vdtmMovingVerticalMonoRamp
| vdtmMovingVerticalMonoRamp = lib_mvIMPACT_acquire.vdtmMovingVerticalMonoRamp |
Will generate a moving vertical mono ramp.
◆ vdtmMovingYUV411_UYYVYY_PackedRamp
| vdtmMovingYUV411_UYYVYY_PackedRamp = lib_mvIMPACT_acquire.vdtmMovingYUV411_UYYVYY_PackedRamp |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV411_UYYVYY_Packed.
- Since
- 2.13.0
◆ vdtmMovingYUV422_UYVYPackedRamp
| vdtmMovingYUV422_UYVYPackedRamp = lib_mvIMPACT_acquire.vdtmMovingYUV422_UYVYPackedRamp |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV422_UYVYPacked or mvIMPACT.acquire.ibpfYUV422_UYVY_10Packed depending on the value of the 'ChannelBitDepth' property.
◆ vdtmMovingYUV422PackedRamp
| vdtmMovingYUV422PackedRamp = lib_mvIMPACT_acquire.vdtmMovingYUV422PackedRamp |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV422Packed or mvIMPACT.acquire.ibpfYUV422_10Packed depending on the value of the 'ChannelBitDepth' property.
◆ vdtmMovingYUV422PlanarRamp
| vdtmMovingYUV422PlanarRamp = lib_mvIMPACT_acquire.vdtmMovingYUV422PlanarRamp |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV422Planar.
◆ vdtmMovingYUV444_UYVPackedRamp
| vdtmMovingYUV444_UYVPackedRamp = lib_mvIMPACT_acquire.vdtmMovingYUV444_UYVPackedRamp |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV444_UYVPacked or mvIMPACT.acquire.ibpfYUV444_UYV_10Packed depending on the value of the 'ChannelBitDepth' property.
◆ vdtmMovingYUV444PackedRamp
| vdtmMovingYUV444PackedRamp = lib_mvIMPACT_acquire.vdtmMovingYUV444PackedRamp |
Will generate a moving test pattern with pixel format mvIMPACT.acquire.ibpfYUV444Packed or mvIMPACT.acquire.ibpfYUV444_10Packed depending on the value of the 'ChannelBitDepth' property.
◆ vdtmVerticalMonoRamp
| vdtmVerticalMonoRamp = lib_mvIMPACT_acquire.vdtmVerticalMonoRamp |
Will generate a vertical mono ramp.
◆ vsCCIR
| vsCCIR = lib_mvIMPACT_acquire.vsCCIR |
CCIR video signal: Grey, 50 fields per second, 625 lines.
◆ vsNTSCM
| vsNTSCM = lib_mvIMPACT_acquire.vsNTSCM |
NTSC video signal: Color, 60 fields per second, 525 lines.
◆ vsPALBGH
| vsPALBGH = lib_mvIMPACT_acquire.vsPALBGH |
PAL video signal: Color, 50 fields per second, 625 lines.
◆ vsRS170
| vsRS170 = lib_mvIMPACT_acquire.vsRS170 |
RS 170 video signal: Grey, 60 fields per second, 525 lines.
◆ vsSDI1080i
| vsSDI1080i = lib_mvIMPACT_acquire.vsSDI1080i |
SDI video signal: Different frame rates, 1080 lines, interlaced.
◆ vsSDI1080p
| vsSDI1080p = lib_mvIMPACT_acquire.vsSDI1080p |
SDI video signal: Different frame rates, 1080 lines, progressive.
◆ vsSDI480i
| vsSDI480i = lib_mvIMPACT_acquire.vsSDI480i |
SDI video signal: 60 fields per second, 480 lines, interlaced.
◆ vsSDI576i
| vsSDI576i = lib_mvIMPACT_acquire.vsSDI576i |
SDI video signal: 50 fields per second, 576 lines, interlaced.
◆ vsSDI720p
| vsSDI720p = lib_mvIMPACT_acquire.vsSDI720p |
SDI video signal: Different frame rates, 720 lines, progressive.
◆ vtFloat
| vtFloat = lib_mvIMPACT_acquire.vtFloat |
Defines a property for float types.
◆ vtInt
| vtInt = lib_mvIMPACT_acquire.vtInt |
Defines a property for 32 bit integer types.
◆ vtInt64
| vtInt64 = lib_mvIMPACT_acquire.vtInt64 |
Defines a property for 64 bit integer types.
◆ vtPtr
| vtPtr = lib_mvIMPACT_acquire.vtPtr |
Defines a property for pointer types.
◆ vtString
| vtString = lib_mvIMPACT_acquire.vtString |
Defines a property for strings.
◆ wbcmContinuous
| wbcmContinuous = lib_mvIMPACT_acquire.wbcmContinuous |
Do a continuous white balance calibration.
◆ wbcmNextFrame
| wbcmNextFrame = lib_mvIMPACT_acquire.wbcmNextFrame |
Use the next image to perform the white balance calibration.
This is defined for bayer color sensors only.
◆ wbcmOff
| wbcmOff = lib_mvIMPACT_acquire.wbcmOff |
Do not perform calibration, current values will be used.
◆ wbpBlueSky
| wbpBlueSky = lib_mvIMPACT_acquire.wbpBlueSky |
A set of constant parameters optimised for scenes illuminated by day light and perfect weather.
◆ wbpDayLight
| wbpDayLight = lib_mvIMPACT_acquire.wbpDayLight |
A set of constant parameters optimised for scenes illuminated by day light.
◆ wbpFluorescent
| wbpFluorescent = lib_mvIMPACT_acquire.wbpFluorescent |
A set of constant parameters optimised for scenes illuminated by fluorescent light sources.
◆ wbpHalogen
| wbpHalogen = lib_mvIMPACT_acquire.wbpHalogen |
A set of constant parameters optimised for scenes illuminated by halogen light sources.
◆ wbpPhotoFlash
| wbpPhotoFlash = lib_mvIMPACT_acquire.wbpPhotoFlash |
A set of constant parameters optimised for scenes illuminated by photo flash light sources.
◆ wbpTungsten
| wbpTungsten = lib_mvIMPACT_acquire.wbpTungsten |
A set of constant parameters optimised for scenes illuminated by tungsten light sources.
◆ wbpUser1
| wbpUser1 = lib_mvIMPACT_acquire.wbpUser1 |
A parameter set which can be modified by the user.
◆ wbpUser2
| wbpUser2 = lib_mvIMPACT_acquire.wbpUser2 |
A parameter set which can be modified by the user.
◆ wbpUser3
| wbpUser3 = lib_mvIMPACT_acquire.wbpUser3 |
A parameter set which can be modified by the user.
◆ wbpUser4
| wbpUser4 = lib_mvIMPACT_acquire.wbpUser4 |
A parameter set which can be modified by the user.