Loading...
Searching...
No Matches
Achieve a defined image frequency (HRTC)
- Note
- Please have a look at the Hardware Real-Time Controller (HRTC) chapter for basic information.
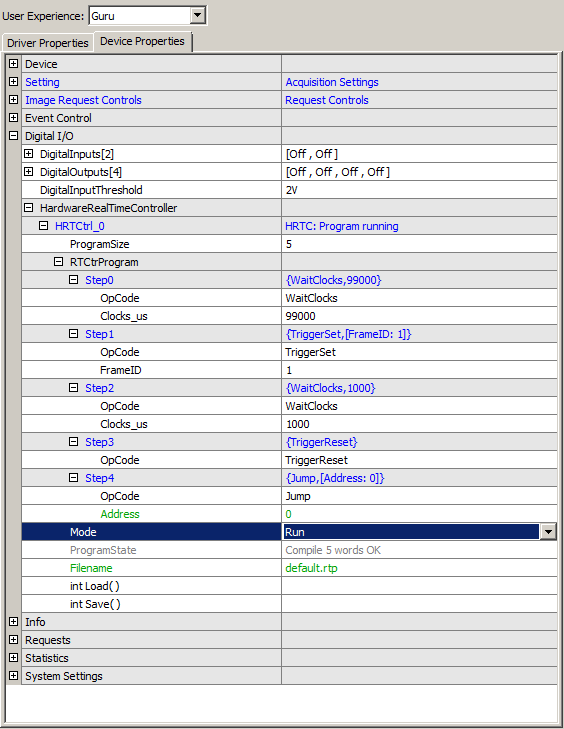
With the use of the HRTC, any feasible frequency with the accuracy of micro seconds(us) is possible. The program to achieve this roughly must look like this (with the trigger mode set to ctmOnRisingEdge):
0. WaitClocks( <frame time in us> - <trigger pulse width in us>) ) 1. TriggerSet 1 2. WaitClocks( <trigger pulse width in us> ) 3. TriggerReset 4. Jump 0
So to get e.g. exactly 10 images per second from the camera the program would somehow look like this(of course the expose time then must be smaller or equal then the frame time in normal shutter mode):
0. WaitClocks 99000 1. TriggerSet 1 2. WaitClocks 1000 3. TriggerReset 4. Jump 0
- Note
- Please note the max. frame rate of the corresponding sensor!
To see a code sample (in C++) how this can be implemented in an application see the description of the class mvIMPACT::acquire::RTCtrProgram (C++ developers)