Loading...
Searching...
No Matches
Sensor Overview
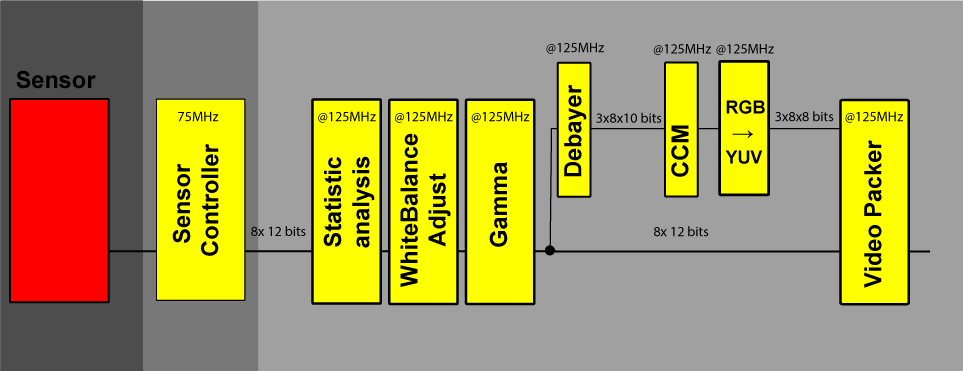
Image data flow
The following block diagrams show the data flow of the image data after being read from the sensor chip in the camera. The transfer latency (stream controller + resend buffer + packet generator) of the data is less than 100 us.
1 Measured accord. to EMVA1288 with gray scale version of the camera
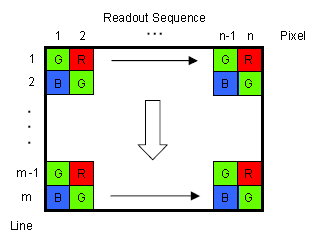
Output sequence of color sensors (RGB Bayer)
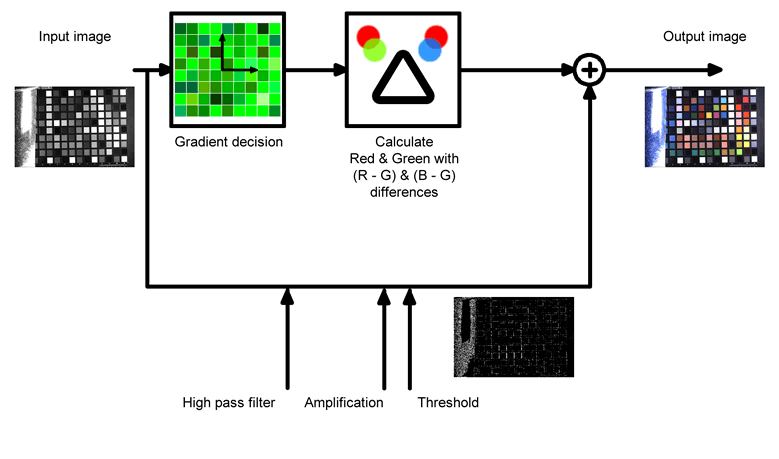
Debayering of color sensors (RGB Bayer)
For Bayer demosaicing in the camera, we use our "Adaptive Edge Sensing Plus" method. I.e. "Adaptive Edge Sensing Plus" detects edges, filters and sharpens them depending on the location. It tries to reconstruct the green channel based on a gradient. Afterwards, it creates the differences between red and green, and blue and green, interpolates the values and adds the green values again. The second path below adds a high path filter, an amplifier, and a threshold to the Bayer data.
The advantages of the "Adaptive Edge Sensing Plus" method are:
- Very few false colors
- No alias effects
- Sharp edges
- Low noise
On the host side, the "Adaptive Edge Sensing Plus" method needs 20 % CPU load.
Supported image formats
It depends on the sensor model which image formats are actually supported.
The parameter PixelFormat in the ImageFormatControl lists all the supported image formats of the specific camera model. In ImpactControlCenter you can find the PixelFormat parameter in "Setting → Base → Camera → GenICam → Image Format Control → Pixel Format".
| Gray scale version | Color version |
| Mono8 | |
| Mono10 | |
| Mono12Packed | |
| Mono16 | |
| BayerGR8 (GR, RG, GB, BG depends on camera type) | |
| BayerGR10 (GR, RG, GB, BG depends on camera type) | |
| BayerGR12p (GR, RG, GB, BG depends on camera type) | |
| BayerGR16 (GR, RG, GB, BG depends on camera type) | |
| BayerGR12Packed (GR, RG, GB, BG depends on camera type) | |
| RGB8Packed | |
| BGR8Packed | |
| BGR10V2Packed | |
| YUV422Packed | |
| YUV422_YUYVPacked | |
| YUV444Packed | |
- See also
- For more details about the image formats, please have a look at the enums TImageDestinationPixelFormat (C++) and TImageBufferPixelFormat (C++) in the Impact Acquire API manuals.
An example application about the pixel formats called ContinuousCaptureAllFormats is also available.
CMOS sensors
Approximately 33 % of power is consumed by the sensor board and the rest by the main board. The main consumers are the FPGA and the sensor itself. Approximately 15 % of consumption is spread over various voltage regulators.