The image acquisition using Impact Acquire with Balluff hardware is handled driver-side by these queues:
- the request object queue
- the request queue
- the result queue
The main advantage of using queues is the independence of the capture process from side effects. Whenever the application and/or the operating system gets stuck as it is busy doing other things, in the background the framework can continue to work when it has image requests to process. Thus, short time intervals where the system doesn't schedule the applications threads can be buffered.
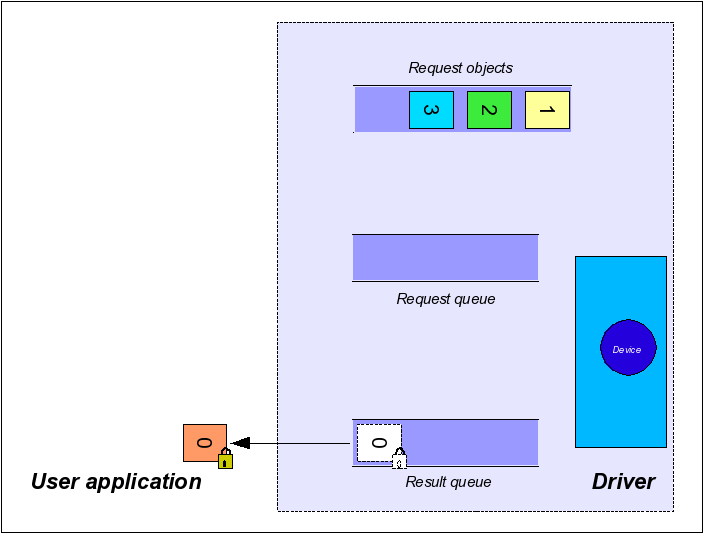
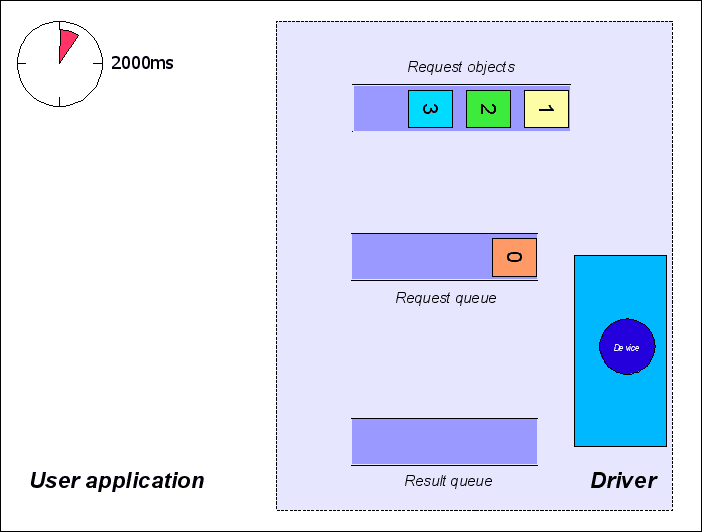
The following figure shows what the initial state of the driver's internal queues will look like when no request for an image has been made by the user:
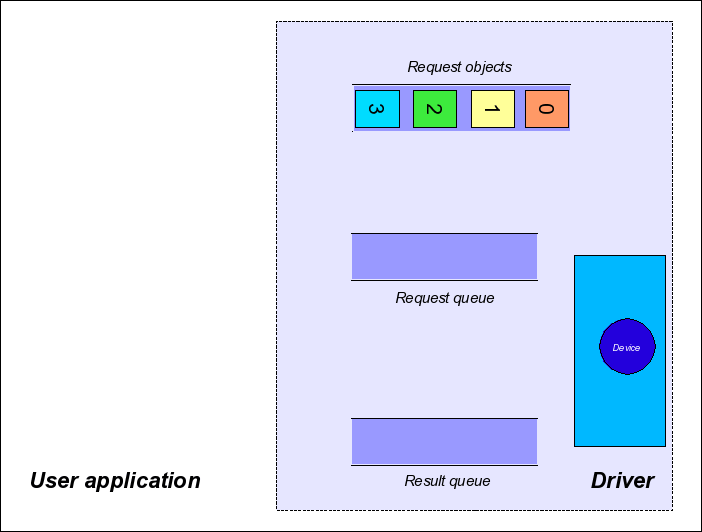
Within the user application, you can control the number of request objects with these functions:
- mvIMPACT::acquire::FunctionInterface::requestCount
- mvIMPACT::acquire::SystemSettings::requestCount
The Capture Process
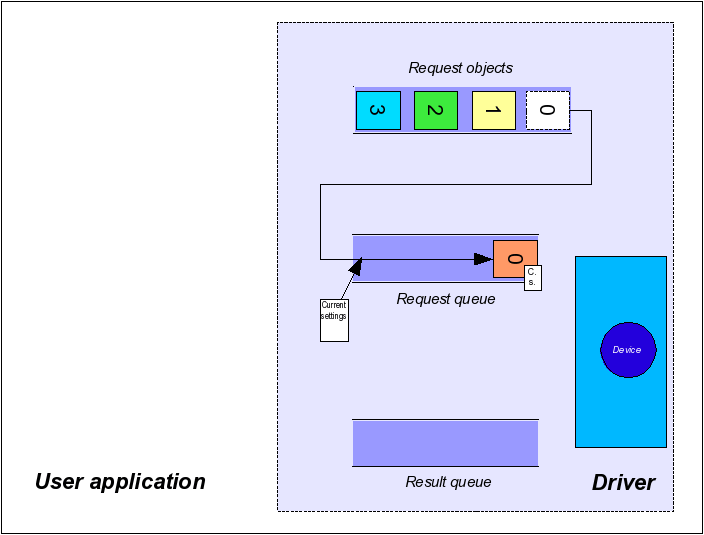
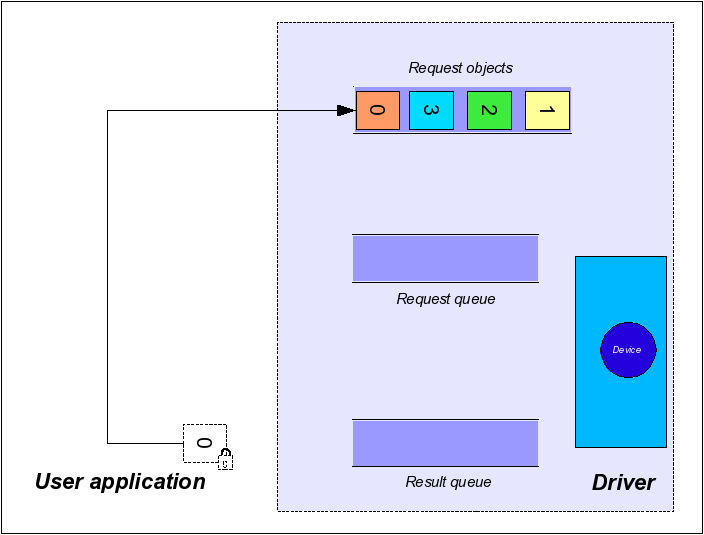
Step 1: Single Request
Whenever the user application requests an image, one of the request objects is placed in the request queue.
In device specific interface layout (see property InterfaceLayout of the device object or the enumeration mvIMPACT::acquire::Device::interfaceLayout for details) during this step all the settings (e.g. gain, exposure time, ...) that shall be used for this particular image request will get buffered, thus the driver framework will guarantee that these settings will be used to process this request.
In contrast to that when working with the GenICam™ interface layout, all modifications applied to settings will directly be written to the device thus in order to guarantee that a certain change is already reflected in the next image, the capture process must be stopped, then the changes must be applied and the capture process is restarted again.
- Note
- It is crucial to understand this fundamental difference between the two interface layouts! Please make sure you read the corresponding section of this manual: GenICam™ vs. DeviceSpecific Interface Layout
The function to send the request for one image down to the driver is named: mvIMPACT::acquire::FunctionInterface::imageRequestSingle
- Note
- There is NO live mode. To implement a continuous capture it is recommended that the user application starts a thread that continuously requests images and returns the capture images or the result of an image processing back to the application.
- See also
- The ContinuousCapture example in the examples section of this documentation
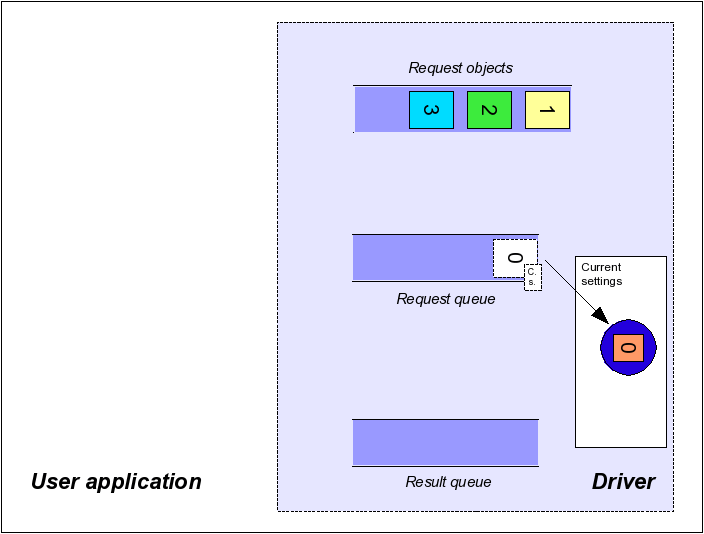
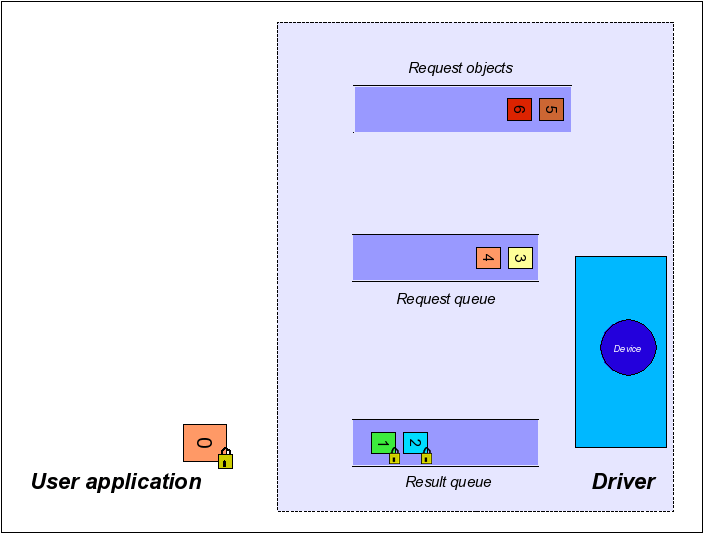
Step 2: Image Capture
Whenever there are outstanding requests in the request queue the framework will always automatically remove the oldest request from this queue when it is either done processing the previous request OR was in idle mode. It will then try to capture data according to the desired capture parameters (such as gain, exposure time, etc.) into the buffer associated with this request.
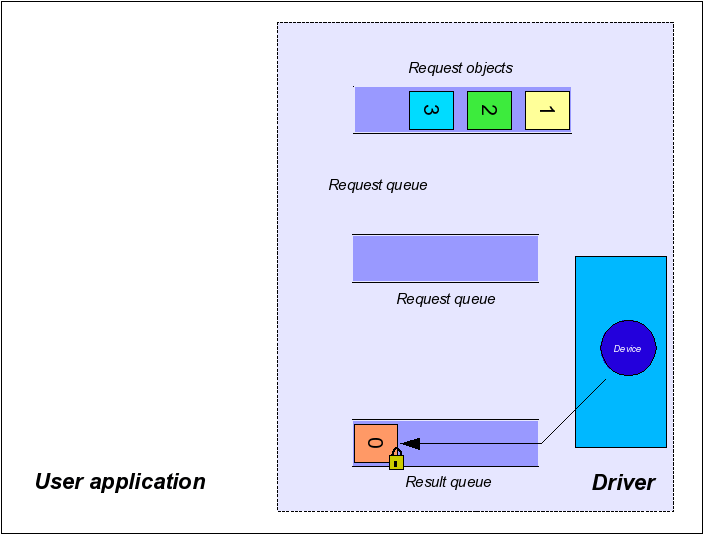
Step 3: Result Queue
When the framework stops processing the current request object it locks the content (and therefore also the attached image) and thus guarantees not to change it until it is unlocked by the user again.
- Note
- The term 'stops processing' does NOT necessarily guarantee that an image has been captured. There might be error conditions that don't allow a complete image to be captured or timeout conditions that will stop processing the current request (see section 'Timeouts' later in this chapter). A buffer placed in the result queue can still be incomplete or corrupt. Each request object therefore has its very own Result property that carries additional information about the consistency of the buffer content that has been delivered.
Step 4: Request Wait For
When the user starts to wait for a request, the next available result queue entry will be returned to the application. The wait is a blocking function call. The function will return when either a request has been placed in the result queue by the framework or the user supplied timeout passed to the wait function call has elapsed. If there is at least one entry in the result queue already when the wait function is called, the function will return immediately. In order to check if there are entries in the result queue without waiting an application can pass 0 as the timeout value. However when the result queue is NOT empty, this call will remove one entry and return it to the application as would happen when passing a timeout value larger than 0, thus the application must always handle requests returned by the wait function. requests extracted from the result queue but NOT explicitly unlocked by the application will not be usable by the framework anymore!
This can be achieved by calling the function:
mvIMPACT::acquire::FunctionInterface::imageRequestWaitFor
Step 5: Request Unlock
Request objects returned to the user are locked for the driver. So if the user does not unlock the images, the framework can't use this request object anymore and thus a permanent acquisition won't be possible as sooner or later all available requests will have been processed by the framework and have been returned to the user. Therefore, it is crucial to unlock request objects that have been processed by the user in order to allow the framework to use them again. This mechanism makes sure that the framework can't overwrite stuff the user still has to process and also makes sure that the user can't write into memory the framework will use to capture images into.
- Note
- Once unlocked the memory associated with the image is not guaranteed to remain valid, so it should not be accessed by the user application under any circumstances!
The functions to unlock the request buffer are called:
mvIMPACT::acquire::FunctionInterface::imageRequestUnlock
Reset The Queues
To restore the driver internal initial state (remove all queue entries from the chain of processing) this method can be used:
mvIMPACT::acquire::FunctionInterface::imageRequestReset
- Note
- Calling this function will NOT unlock requests currently locked by the user. A request object is locked for the framework whenever the corresponding wait function returns a valid request object. These objects must always be unlocked by the user explicitly.
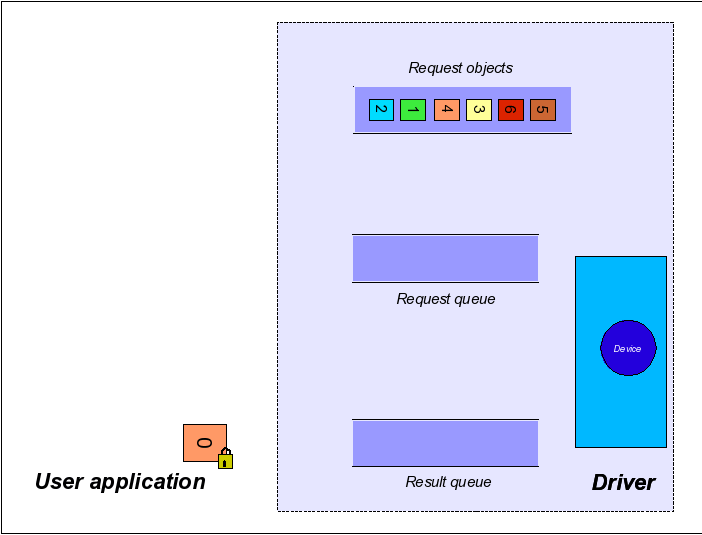
When not explicitly passing the request objects number to the framework when calling the imageRequestSingle function, the driver framework will use any of the request objects currently available to him, thus the order of the request objects might change randomly. An application should NOT rely on request objects arriving in a certain order unless explicitly stated by the application itself.
Timeouts
This section explains the different timeouts conditions that can occur during the capture process.
Two different timeouts have influence on the acquisition process. The first one is defined by the property ImageRequestTimeout_ms. This can be accessed like this:
mvIMPACT::acquire::BasicDeviceSettings::ImageRequestTimeout_ms
This property defines the maximum time the framework tries to process a request. If this time elapses before e.g. an external trigger event occurred or an image was transmitted by the camera the request object will be returned to the driver. In that case, the framework will place this request object in the result queue and the user will get a valid request object when calling the corresponding 'wait for' function, but this request then will NOT contain a valid image, but it result property will contain mvIMPACT::acquire::rrTimeout.
- Note
- Since Impact Acquire 2.32.0 the default value for this property has been changed! See Calling 'imageRequestWaitFor' Never Returns / An Application No Longer Terminates After Upgrading To Impact Acquire 2.32.0 Or Greater for details.
The other timeout parameter is the timeout value passed to the 'wait for' function (described above). This value defines the maximum time in ms the function will wait for a valid image. After this timeout value elapsed, the function will return, but will not necessarily return a request object when no request object has been placed in the result queue.
Now assuming ImageRequestTimeout_ms is set to a value of 2000 ms the figure shows the status after, this is a triggered application and
- mvIMPACT::acquire::FunctionInterface::imageRequestSingle was called ONCE
Then the request queue will contain one entry:
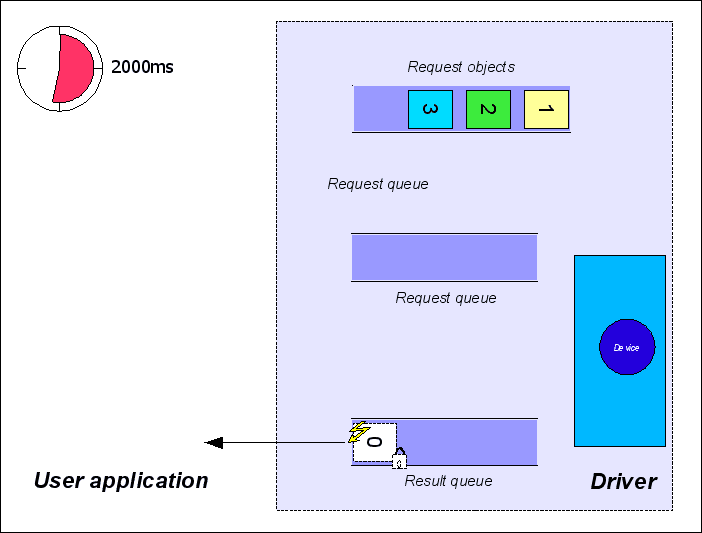
If now the next external trigger signal occurs AFTER the timeout of 2000ms has elapsed (or a trigger signal never occurs) the framework will place the unprocessed request object in its result queue.
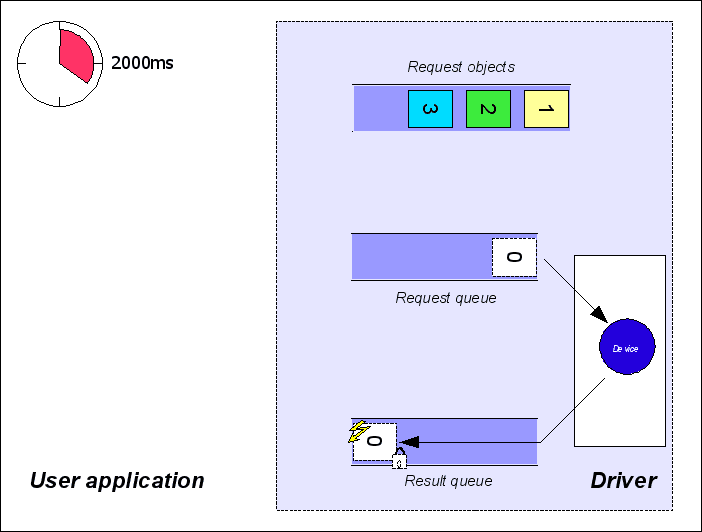
From here, it will be returned to the user immediately the next time mvIMPACT::acquire::FunctionInterface::imageRequestWaitFor is called.
mvIMPACT::acquire::Request::requestResult will contain mvIMPACT::acquire::rrTimeout (figure 11) now
- Note
- If no further call to mvIMPACT::acquire::FunctionInterface::imageRequestSingle has been made, the next triggered image will be lost, as the framework will silently discard the trigger signal because he has no request to process.
If the next external trigger comes BEFORE the timeout of 2000ms has elapsed, an image will be captured and the next call to mvIMPACT::acquire::FunctionInterface::imageRequestWaitFor will return after the image is ready, passing a valid image back to the user.
mvIMPACT::acquire::Request::requestResult will contain mvIMPACT::acquire::rrOK.
- Note
- All requests returned by mvIMPACT::acquire::FunctionInterface::imageRequestWaitFor need to be unlocked in ANY case independent from mvIMPACT::acquire::Request::requestResult.
It's important to realize that even several calls to mvIMPACT::acquire::FunctionInterface::imageRequestWaitFor are possible to wait for a single request object. Until no image has been placed in the result queue each call will return after its timeout has elapsed returning mvIMPACT::acquire::DEV_WAIT_FOR_REQUEST_FAILED. However, waiting multiple times for an image has NO effect on the position of the request objects in their queues. This is only when either an image has been captured or when the timeout defined by the property ImageRequestTimeout_ms has elapsed.
Acquisition Start/Stop Behaviour
A couple of other features need to be mentioned when explaining Impact Acquire's buffer handling and data acquisition behaviour:
- the functions mvIMPACT::acquire::FunctionInterface::acquisitionStart and mvIMPACT::acquire::FunctionInterface::acquisitionStop
- the property mvIMPACT::acquire::Device::acquisitionStartStopBehaviour
- the property mvIMPACT::acquire::SystemSettings::acquisitionIdleTimeMax_ms
Some devices (e.g. GigE Vision™ devices) use a streaming approach to send data to the host system. This means once started the device will send its data to the host system as it becomes ready and does NOT wait for the host system to ask for data (such as an image). For the host system that can result in data being lost if it does not provide a sufficient amount of buffers to acquire the data into. Thus whenever a device is generating images, frames or data buffers faster than the host system can provide capture buffers, data is lost.
Some device/framework combinations therefore support 2 different ways to control the start/stop behaviour of data streaming from a device:
- An automatic mode where the device framework internally decides when to start and when to stop the device's streaming channel. In this mode the framework will automatically send a 'start streaming' command to the device once the first request command is issued using the mvIMPACT::acquire::FunctionInterface::imageRequestSingle function. When the request queue runs empty the framework will wait the amount of milliseconds defined by the
AcquisitionIdleTimeMax_msproperties. If no new request command is issued during that time, the framework will automatically send a 'stop streaming' command to the device - A user controlled mode where the application must explicitly start and stop the data transmission from the device to the host system
While the automatic mode keeps the application code fairly simple, the user controlled mode will sometimes allow a much better control about the capture process. Especially for applications where NO data loss can be accepted, the user controlled mode might be the better choice even though it requires a bit of additional code on the application side.
If the user controlled mode is supported the AcquisitionStartStopBehaviour property's translation dictionary will contain the assbUser value. The default mode will be assbDefault, but if supported an application can switch to assbUser BEFORE the device is opened.
- Note
- Some devices (e.g. all devices belonging to mvBlueLYNX-X family) will ONLY support the application controlled mode. For the mvBlueLYNX-X this also comes with another restriction: All buffers that will be used to capture data into between a call to the acquisition start function and the acquisition stop function must be announced to the framework by calling the function mvIMPACT::acquire::FunctionInterface::imageRequestSingle BEFORE starting the acquisition thus when there are 6 request objects all these 6 objects should be announced and then the acquisition should be started. This is for performance reasons. Buffers announced after calling the acquisition start command will be rejected by the driver!
-
The property
AcquisitionStartStopBehaviourwill become read-only after the device has been opened.
Situations where an application controlled start and stop of the device's data transmission might be beneficial:
- NO loss of data can be tolerated
- an application runs at very high frame rates (Otherwise especially when requesting the first buffer data might be lost, as when internally starting the data streaming from device the request queue might immediately run empty again (there is just a single buffer at that moment) as the device might send frames faster than additional buffers get queued by the application)
When the application controls the start and stop of the streaming from the device some additional code must be added to an application: