Loading...
Searching...
No Matches
CameraSettingsBlueFOX Class Referencesealed
mvBlueFOX related camera settings (Device specific interface layout only). More...
Inheritance diagram for CameraSettingsBlueFOX:
Public Member Functions | |
| CameraSettingsBlueFOX (Device device) | |
| Constructs a new mv.impact.acquire.CameraSettingsBlueFOX object. | |
| CameraSettingsBlueFOX (Device device, String settingName) | |
| Constructs a new mv.impact.acquire.CameraSettingsBlueFOX object. | |
| AutoControlParameters | getAutoControlParameters () |
| Provides access to the control parameters for AGC and AEC. | |
| IEnumerable< T > | getEnumerable< T > () |
| Returns an enumerator of a certain type that iterates through the collection. | |
| IEnumerator< int > | GetEnumerator () |
| Returns an enumerator that iterates through the collection. | |
| HDRControl | getHDRControl () |
| Returns the mv.impact.acquire.HDRControl object associated with this setting. | |
| void | restoreDefault () |
| Restores the default for every component of this collection. | |
Public Attributes | |
| readonly EnumPropertyI< TDeviceAdvancedOptions > | advancedOptions = new EnumPropertyI<TDeviceAdvancedOptions>() |
| An enumerated integer property defining a collection of advanced options that can be enabled or disabled. | |
| readonly PropertyI | aoiHeight = new PropertyI() |
| An integer property defining the number of lines to capture. | |
| readonly PropertyI | aoiStartX = new PropertyI() |
| An integer property defining the X-offset for each capture line. | |
| readonly PropertyI | aoiStartY = new PropertyI() |
| An integer property defining the Y-offset. | |
| readonly PropertyI | aoiWidth = new PropertyI() |
| An integer property defining the number of pixels to capture per line. | |
| readonly EnumPropertyI< TAutoControlMode > | autoControlMode = new EnumPropertyI<TAutoControlMode>() |
| An enumerated integer property defining the auto control mode the device is operated in. | |
| readonly EnumPropertyI< TAutoExposureControl > | autoExposeControl = new EnumPropertyI<TAutoExposureControl>() |
| An enumerated integer property, which represents the current mode the AEC (A utomatic E xpose C ontrol) is operated in. | |
| readonly EnumPropertyI< TAutoGainControl > | autoGainControl = new EnumPropertyI<TAutoGainControl>() |
| An enumerated integer property, which represents the current mode the AGC (A utomatic G ain C ontrol) is operated in. | |
| readonly PropertyS | basedOn = new PropertyS() |
| A string property (read-only) containing the name of the setting this setting is based on. | |
| readonly EnumPropertyI< TCameraBinningMode > | binningMode = new EnumPropertyI<TCameraBinningMode>() |
| An enumerated integer property defining the binning mode the camera is operated in. | |
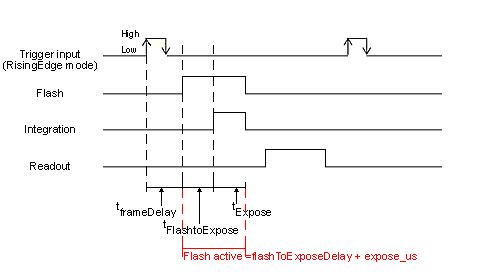
| readonly PropertyI | expose_us = new PropertyI() |
| An integer property which defines the exposure time for an image in us. | |
| readonly EnumPropertyI< TCameraExposeMode > | exposeMode = new EnumPropertyI<TCameraExposeMode>() |
| An enumerated integer property defining the exposure mode the camera sensor is operated in. | |
| readonly PropertyI | exposeToFlashDelay_us = new PropertyI() |
| An integer property defining the delay in us between the beginning of the expose period of the image sensor and the start of the flash signal output. | |
| readonly EnumPropertyI< TCameraFlashMode > | flashMode = new EnumPropertyI<TCameraFlashMode>() |
| An enumerated integer property defining the behaviour of the flash output of the camera (if available). | |
| readonly PropertyI | flashToExposeDelay_us = new PropertyI() |
| An integer property defining the delay in us between the start of the flash signal output and the beginning of the expose period of the image sensor. | |
| readonly EnumPropertyI< TCameraFlashType > | flashType = new EnumPropertyI<TCameraFlashType>() |
| An enumerated integer property defining the type of the flash output of the camera (if available). | |
| readonly PropertyI | frameDelay_us = new PropertyI() |
| An integer property defining the delay in us between an external trigger event an the begin of the sensor exposure. | |
| readonly PropertyF | gain_dB = new PropertyF() |
| A float property defining the gain in dB. | |
| readonly PropertyI | imageRequestTimeout_ms = new PropertyI() |
| An integer property defining the maximum time to wait for an image in ms. | |
| readonly PropertyI | lineDelay_clk = new PropertyI() |
| An integer property defining the delay in clocks between two lines. | |
| readonly PropertyF | offset_pc = new PropertyF() |
| A float property defining the analogue sensor offset in percent of the allowed range (sensor specific). | |
| readonly PropertyI | offsetAutoBlackLevel = new PropertyI() |
| An integer property defining the digital value assumed as black. | |
| readonly EnumPropertyI< TBlueFOXOffsetAutoBlackSpeed > | offsetAutoBlackSpeed = new EnumPropertyI<TBlueFOXOffsetAutoBlackSpeed>() |
| An enumerated integer property defining the speed of the auto offset calibration circuit. | |
| readonly EnumPropertyI< TAutoOffsetCalibration > | offsetAutoCalibration = new EnumPropertyI<TAutoOffsetCalibration>() |
| An enumerated integer property defining the offset calibration mode. | |
| readonly PropertyI | offsetBlackLevel_pc = new PropertyI() |
| An integer property defining the analogue sensor offset in percent of the allowed range (sensor specific). | |
| readonly PropertyF | offsetCorrection_pc = new PropertyF() |
| A float property defining and additional analogue sensor offset in percent of the allowed range (sensor specific) per color channel. | |
| readonly EnumPropertyI< TCameraPixelClock > | pixelClock_KHz = new EnumPropertyI<TCameraPixelClock>() |
| An enumerated integer property defining the pixel clock of the camera sensor in KHz. | |
| readonly EnumPropertyI< TImageBufferPixelFormat > | pixelFormat = new EnumPropertyI<TImageBufferPixelFormat>() |
| An enumerated integer property defining the pixel format used to transfer the image data into the target systems host memory. | |
| readonly PropertyIBoolean | reverseX = new PropertyIBoolean() |
| An enumerated integer property defining the behaviour of the Aoi reverse mode (if available). | |
| readonly PropertyIBoolean | reverseY = new PropertyIBoolean() |
| An enumerated integer property defining the behaviour of the Aoi reverse mode (if available). | |
| readonly EnumPropertyI< TBlueFOXSensorTiming > | sensorTimingMode = new EnumPropertyI<TBlueFOXSensorTiming>() |
| An enumerated integer property defining the current image sensor timing mode. | |
| readonly EnumPropertyI< TCameraShutterMode > | shutterMode = new EnumPropertyI<TCameraShutterMode>() |
| An enumerated integer property defining the shutter mode to use. | |
| readonly EnumPropertyI< TCameraTestMode > | testMode = new EnumPropertyI<TCameraTestMode>() |
| An enumerated integer property defining the image transmission mode of the camera. | |
| readonly EnumPropertyI< TCameraTriggerMode > | triggerMode = new EnumPropertyI<TCameraTriggerMode>() |
| An enumerated integer property which defines what kind of trigger mode shall be used for an image acquisition. | |
| readonly EnumPropertyI< TCameraTriggerSource > | triggerSource = new EnumPropertyI<TCameraTriggerSource>() |
| An enumerated integer property defining where the trigger signal is expected to occur. | |
Properties | |
| IEnumerable< Component > | componentEnumerable [get] |
| Returns an enumerator that iterates through the collection. | |
| IEnumerable< ComponentList > | componentListEnumerable [get] |
| Returns an enumerator that iterates through all the mv.impact.acquire.ComponentList elements in the collection. | |
| int | hObj [get] |
| Returns a unique identifier for the component collection referenced by this object. | |
Detailed Description
mvBlueFOX related camera settings (Device specific interface layout only).
This class contains properties to control the way the image sensor of the mvBlueFOX behaves.
- Note
- This class will only be available if mv.impact.acquire.Device.interfaceLayout is set to mv.impact.acquire.TDeviceInterfaceLayout.dilDeviceSpecific before the device is opened.
- Examples
- DigitalIOs.cs.
Constructor & Destructor Documentation
◆ CameraSettingsBlueFOX() [1/2]
|
inline |
Constructs a new mv.impact.acquire.CameraSettingsBlueFOX object.
- Parameters
-
[in] device A pointer to a mv.impact.acquire.Device object obtained from a mv.impact.acquire.DeviceManager object.
◆ CameraSettingsBlueFOX() [2/2]
|
inline |
Constructs a new mv.impact.acquire.CameraSettingsBlueFOX object.
- Parameters
-
[in] device A pointer to a mv.impact.acquire.Device object obtained from a mv.impact.acquire.DeviceManager object. [in] settingName The name of the driver internal setting to access with this instance. A list of valid setting names can be obtained by a call to mv.impact.acquire.FunctionInterface.availableSettings, new settings can be created with the function mv.impact.acquire.FunctionInterface.createSetting
Member Function Documentation
◆ getAutoControlParameters()
|
inlineinherited |
Provides access to the control parameters for AGC and AEC.
- Note
- These settings will only affect the image if mv.impact.acquire.CameraSettingsBlueDevice.autoGainControl, mv.impact.acquire.CameraSettingsBlueDevice.autoExposeControl or both are set to active.
◆ getEnumerable< T >()
|
inlineinherited |
Returns an enumerator of a certain type that iterates through the collection.
This interface will allow to e.g. write code like this:
{
validateProperty(c);
}
A class to query various general information about the device, its driver and other information.
Definition Info.cs:10
See the framework's documentation about the System.Collections.IEnumerable interface for more information.
- Returns
- An enumerator that iterates through the collection
◆ GetEnumerator()
|
inlineinherited |
Returns an enumerator that iterates through the collection.
See the framework's documentation about the System.Collections.IEnumerable interface for more information.
- Returns
- An enumerator that iterates through the collection
◆ getHDRControl()
|
inline |
Returns the mv.impact.acquire.HDRControl object associated with this setting.
◆ restoreDefault()
|
inlineinherited |
Restores the default for every component of this collection.
Calling this function will restore the default value for every component belonging to this collection.
- Note
- The caller must have the right to modify the component. Otherwise an exception will be thrown.
Member Data Documentation
◆ advancedOptions
| readonly EnumPropertyI<TDeviceAdvancedOptions> advancedOptions = new EnumPropertyI<TDeviceAdvancedOptions>() |
An enumerated integer property defining a collection of advanced options that can be enabled or disabled.
This property is highly sensor dependent. Each sensor might offer a different sub set of the options offered. Only experienced users should work with this feature.
Valid values for this property are defined by the enumeration mv.impact.acquire.TDeviceAdvancedOptions.
◆ aoiHeight
An integer property defining the number of lines to capture.
◆ aoiStartX
An integer property defining the X-offset for each capture line.
Example: When setting this property to 5 the first pixel in each line of the resulting image will be pixel number 5 of each line transmitted by the camera.
◆ aoiStartY
An integer property defining the Y-offset.
Example: When setting this property to 5 the first line of the resulting image will be line number 5 of the image transmitted by the camera
◆ aoiWidth
An integer property defining the number of pixels to capture per line.
◆ autoControlMode
|
inherited |
An enumerated integer property defining the auto control mode the device is operated in.
This property can be used to control the overall behaviour of the algorithms used for performing AEC (A utomatic E xpose C ontrol) or AGC (A utomatic G ain C ontrol). This could be done by the device itself thus e.g. even in the analog domain or e.g. by a software process in the driver. Each method will offer certain advantages and disadvantages and depending on the application the correct method can be selected.
Valid values for this property are defined by the enumeration mv.impact.acquire.TAutoControlMode.
Every device or even different models belonging to the same device family may support different auto control modes, thus it's crucial to query the valid modes for each device by reading the properties translation dictionary BEFORE trying to assign a certain value to this property.
◆ autoExposeControl
|
inherited |
An enumerated integer property, which represents the current mode the AEC (A utomatic E xpose C ontrol) is operated in.
The values used to capture the image, which are directly influenced by an activated AGC or AEC (e.g. the gain or the exposure time) will be returned as part of the result of the image request.
Valid values for this property are defined by the enumeration mv.impact.acquire.TAutoExposureControl.
- Note
- This property might not be supported by every device. Therefore always call the function mv.impact.acquire.Component.isValid to check if this property is available or not.
◆ autoGainControl
|
inherited |
An enumerated integer property, which represents the current mode the AGC (A utomatic G ain C ontrol) is operated in.
The values used to capture the image, which are directly influenced by an activated AGC or AEC (e.g. the gain or the exposure time) will be returned as part of the result of the image request.
Valid values for this property are defined by the enumeration mv.impact.acquire.TAutoGainControl.
- Note
- This property is not supported by every device. Therefore always call the function mv.impact.acquire.Component.isValid to check if this property is available or not.
◆ basedOn
A string property (read-only) containing the name of the setting this setting is based on.
- Since
- 1.12.67
◆ binningMode
|
inherited |
An enumerated integer property defining the binning mode the camera is operated in.
By default the no binning will be performed.
- Note
- Not every camera will support every binning mode. To find out which binning modes are supported by your camera you can query the properties translation table with the functions mv.impact.acquire.EnumPropertyI<T>.getTranslationDictString and mv.impact.acquire.EnumPropertyI<T>.getTranslationDictValue There is a more efficient function mv.impact.acquire.PropertyICameraBinningMode.getTranslationDict. in addition to the functions mentioned above.
Valid values for this property are defined by the enumeration mv.impact.acquire.TCameraBinningMode.
◆ expose_us
An integer property which defines the exposure time for an image in us.
◆ exposeMode
|
inherited |
An enumerated integer property defining the exposure mode the camera sensor is operated in.
Valid values for this property are defined by the enumeration mv.impact.acquire.TCameraExposeMode.
- Note
- Not every device will offer the same options. Check for valid modes by reading the properties translation dictionary with the functions mv.impact.acquire.EnumPropertyI<T>.getTranslationDictString and mv.impact.acquire.EnumPropertyI<T>.getTranslationDictValue. There is a more efficient function mv.impact.acquire.PropertyICameraExposeMode.getTranslationDict in addition to the functions mentioned above.
◆ exposeToFlashDelay_us
An integer property defining the delay in us between the beginning of the expose period of the image sensor and the start of the flash signal output.
◆ flashMode
| readonly EnumPropertyI<TCameraFlashMode> flashMode = new EnumPropertyI<TCameraFlashMode>() |
An enumerated integer property defining the behaviour of the flash output of the camera (if available).
If this property is set the cameras flash output (if available) will be pulsed during the exposure period of the sensor. In that case the pulse width will be equal to the exposure time.
Valid values for this property are defined by the enumeration mv.impact.acquire.TCameraFlashMode.
- Examples
- DigitalIOs.cs.
◆ flashToExposeDelay_us
An integer property defining the delay in us between the start of the flash signal output and the beginning of the expose period of the image sensor.
- Note
- This property is mainly provided for compatibility reasons. Previous versions of the mvBlueFOX driver produced a fixed delay of about 300 us between the beginning of the flash signal creation and the beginning of the sensors expose period. Newer versions of the driver do NOT produce this delay anymore which might cause a different illumination for applications using very intensive, short flash and expose times. Applications relying on the delay introduced in older driver versions should set this property to '300' by calling mv.impact.acquire.PropertyI.write.
- Examples
- DigitalIOs.cs.
◆ flashType
| readonly EnumPropertyI<TCameraFlashType> flashType = new EnumPropertyI<TCameraFlashType>() |
An enumerated integer property defining the type of the flash output of the camera (if available).
Depending of the camera sensor type (rolling shutter or frame shutter there well be different modes available
Valid values for this property are defined by the enumeration mv.impact.acquire.TCameraFlashType.
◆ frameDelay_us
An integer property defining the delay in us between an external trigger event an the begin of the sensor exposure.
- Note
- This property is not supported by every device. Therefore always call the function mv.impact.acquire.Component.isValid to check if this property is available or not.
◆ gain_dB
A float property defining the gain in dB.
The formula for given gain_dB is
gain_x= 10 ^ (gain_dB/20)
readonly PropertyF gain_dB
A float property defining the gain in dB.
Definition CameraSettingsBlueDevice.cs:139
Example:
gain_x = 10 ^ (6/20) = 1.995
I.e. increasing the gain setting by 6dB corresponds to factor of 2.
The formula for given gain_x is
gain_dB = 20*log(gain_x) dB
Where:
gain_dB: Balluff gain value (logarithmic)
gain_x: multiplicative gain
^: power function
◆ imageRequestTimeout_ms
An integer property defining the maximum time to wait for an image in ms.
- Attention
- Since Impact Acquire 2.32.0 the default value for this property has been changed! See Calling 'imageRequestWaitFor' Never Returns / An Application No Longer Terminates After Upgrading To Impact Acquire 2.32.0 Or Greater for details.
When this property is set to 0 the timeout never elapses. If the timeout this property defines elapses the currently processed request will be returned to the user even if no data has been captured so far. The result structure of the request object should be examined in that case. Also this should be considered as an error from the users point of view in which case he should clean up the acquisition queue by calling mv.impact.acquire.FunctionInterface.imageRequestReset. Afterwards the capture loop can be restarted.
- Note
- It is crucial to understand that this is a timeout PER REQUEST! The timespan taken into account for the measurement starts when the driver begins to capture data into this particular buffer! So when queuing 4 buffers with a timeout of 3000 ms each and no data being transmitted by the device for any reason will cause the last buffer to time out 3000*4 = 12000 ms AFTER the buffer has been queued and the acquisition has been started as the driver will wait for up to 3 seconds for each buffer that is being processed. When the device sends data this timeout does not affect the runtime behaviour at all. No additional delay is introduced by it when everything runs as planned.
- Examples
- Callback.cs.
◆ lineDelay_clk
An integer property defining the delay in clocks between two lines.
Can be used to slow down the image readout the reduce the peak bandwidth required for the transfer.
◆ offset_pc
A float property defining the analogue sensor offset in percent of the allowed range (sensor specific).
This property influences the average grey level when no light reaches the sensor.
mvBlueFOX specific: Changing its value will have no effect if mv.impact.acquire.CameraSettingsBlueFOX.offsetAutoCalibration is set to mv.impact.acquire.TAutoOffsetCalibration.aocOn.
By default this value will be around 10 (if mv.impact.acquire.CameraSettingsBlueFOX.offsetAutoCalibration if set to mv.impact.acquire.TAutoOffsetCalibration.aocOn). This means the average grey value for an image taken in a completely dark environment will be around 10. When setting mv.impact.acquire.CameraSettingsBlueFOX.offsetAutoCalibration to mv.impact.acquire.TAutoOffsetCalibration.aocOff mv.impact.acquire.CameraSettingsBlueFOX.offset_pc can be used to modify this value.
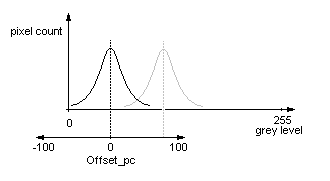
The valid range for this property lies between -100% and +100%, whereas negative values will shifts the black level towards 0 and positive values to 255.
- Note
- This property might not be supported by every device. Therefore always call the function mv.impact.acquire.Component.isValid to check if this property is available or not.
◆ offsetAutoBlackLevel
An integer property defining the digital value assumed as black.
Modifying this property in rare cases might be useful to achieve a higher dynamic range for noise close to the black level.
- Note
- As the mvBlueFOX internally works with a 10 bit analog to digital conversion increasing this value by 4 will result in a black level increased by about 1 in the resulting 8 bit raw image delivered from the camera.
◆ offsetAutoBlackSpeed
| readonly EnumPropertyI<TBlueFOXOffsetAutoBlackSpeed> offsetAutoBlackSpeed = new EnumPropertyI<TBlueFOXOffsetAutoBlackSpeed>() |
An enumerated integer property defining the speed of the auto offset calibration circuit.
Valid values for this property are defined by the enumeration mv.impact.acquire.TBlueFOXOffsetAutoBlackSpeed.
◆ offsetAutoCalibration
| readonly EnumPropertyI<TAutoOffsetCalibration> offsetAutoCalibration = new EnumPropertyI<TAutoOffsetCalibration>() |
An enumerated integer property defining the offset calibration mode.
If this property is set to mv.impact.acquire.TAutoOffsetCalibration.aocOff the offset can be adjusted manually by modifying the mv.impact.acquire.CameraSettingsBlueFOX.offset_pc and mv.impact.acquire.CameraSettingsBlueFOX.offsetCorrection_pc properties.
If set to mv.impact.acquire.TAutoOffsetCalibration.aocOn the offset is approx. 10. That means, that the medium pixel count is 10, in case no light is falling on the sensor.
Valid values for this property are defined by the enumeration mv.impact.acquire.TAutoOffsetCalibration.
◆ offsetBlackLevel_pc
An integer property defining the analogue sensor offset in percent of the allowed range (sensor specific).
This property influences the average grey level when no light reaches the sensor.
- Note
- This property might not be supported by every device. Therefore always check the property mv.impact.acquire.Component.isValid to see if this property is available or not.
◆ offsetCorrection_pc
A float property defining and additional analogue sensor offset in percent of the allowed range (sensor specific) per color channel.
Together with value of the property mv.impact.acquire.CameraSettingsBlueDevice.offset_pc this property influences the average grey level when no light reaches the sensor.
This property stores 4 values.
- The value at index 0 applies to the green component of the red-green rows of the bayer pattern
- The value at index 1 applies to the red component of the bayer pattern
- The value at index 2 applies to the green component of the blue-green rows of the bayer pattern
- The value at index 3 applies to the blue component of the bayer pattern
- Note
- This property might not be supported by every device. Therefore always call the function mv.impact.acquire.Component.isValid to check if this property is available or not. In addition to that this property must be enabled explicitly by setting the advanced option bit mv.impact.acquire.TDeviceAdvancedOptions.daoEnablePerChannelOffsetCorrection of the property mv.impact.acquire.CameraSettingsBlueFOX.advancedOptions.
◆ pixelClock_KHz
|
inherited |
An enumerated integer property defining the pixel clock of the camera sensor in KHz.
Valid values for this property are defined by the enumeration mv.impact.acquire.TCameraPixelClock.
- Note
- Changing the pixel clock at runtime will have major impact on the overall behaviour of the camera. The pixel clock should therefore not be modified constantly during the execution of the application code. Whenever this property is changed, the next images captured should be skipped if a device works with an active auto offset calibration controller circuit as then the control circuits on the camera might need one to three images until all control loops are locked again.
Every device or even different models belonging to the same device family may support different pixel clocks, thus it's crucial to query the valid clock modes for each sensor by reading the properties translation dictionary.
◆ pixelFormat
|
inherited |
An enumerated integer property defining the pixel format used to transfer the image data into the target systems host memory.
Support for this property has been added in version 1.11.0 of Impact Acquire thus old driver versions will raise an exception if an application accesses the property without checking if the property is present.
By default this property will be set to mv.impact.acquire.TImageBufferPixelFormat.ibpfAuto. This will result in the previous driver behaviour where depending on the various post processing steps that are enabled or disabled the driver will decide which transfer format will be used. However sometimes this could result in a transfer format, which is not ideal for the application (e.g. when a post processing step of the application needs RGBx888Packed but the systems bandwidth is limited the application might want to transfer the data in YUV422 packed and then use the fast format conversion algorithm in the driver). This can be achieved by explicitly setting mv.impact.acquire.CameraSettingsBase.pixelFormat to mv.impact.acquire.TImageBufferPixelFormat.ibpfYUV422Packed and mv.impact.acquire.ImageDestination.pixelFormat to mv.impact.acquire.TImageBufferPixelFormat.ibpfRGBx888Packed.
- Note
- Selecting a defined transfer format can in some cases result in certain filters (e.g. dark current, ...) to be switched of as then the filters themselves can no longer influence the transfer format, which is sometimes necessary as not every filter does support every input format. Also this property will contain only pixel formats, which are actually supported by the capture device, thus in most of the cases this will be a subset of the enumeration defining this property.
Valid values for this property are defined by the enumeration mv.impact.acquire.TImageBufferPixelFormat.
◆ reverseX
| readonly PropertyIBoolean reverseX = new PropertyIBoolean() |
An enumerated integer property defining the behaviour of the Aoi reverse mode (if available).
If this property is set the x-axis will be inverted by the sensor (if available).
Valid values for this property are defined by the enumeration mvIMPACT::acquire::TBoolean.
◆ reverseY
| readonly PropertyIBoolean reverseY = new PropertyIBoolean() |
An enumerated integer property defining the behaviour of the Aoi reverse mode (if available).
If this property is set the y-axis will be inverted by the sensor (if available).
Valid values for this property are defined by the enumeration mvIMPACT::acquire::TBoolean.
◆ sensorTimingMode
| readonly EnumPropertyI<TBlueFOXSensorTiming> sensorTimingMode = new EnumPropertyI<TBlueFOXSensorTiming>() |
An enumerated integer property defining the current image sensor timing mode.
Valid values for this property are defined by the enumeration mv.impact.acquire.TBlueFOXSensorTiming.
◆ shutterMode
| readonly EnumPropertyI<TCameraShutterMode> shutterMode = new EnumPropertyI<TCameraShutterMode>() |
An enumerated integer property defining the shutter mode to use.
Valid values for this property are defined by the enumeration mv.impact.acquire.TCameraShutterMode.
◆ testMode
|
inherited |
An enumerated integer property defining the image transmission mode of the camera.
If this property is set to mv.impact.acquire.TCameraTestMode.ctmOff the 'normal' image captured by the cameras sensor will be transmitted. This is the default. To ensure correct operation the camera might define several test modes where some kind of well defined pattern will be transmitted.
Valid values for this property are defined by the enumeration mv.impact.acquire.TCameraTestMode. No every test mode will be supported by every device.
◆ triggerMode
|
inherited |
An enumerated integer property which defines what kind of trigger mode shall be used for an image acquisition.
Valid values for this property are defined by the enumeration mv.impact.acquire.TCameraTriggerMode.
- Note
- Not every device will support every trigger mode. To find out which trigger modes are supported by a specific device at runtime the properties translation dictionary should be queried.
- Also the sensor specific part of this manual will contain a list of trigger modes that are available for this specific image sensor.
◆ triggerSource
| readonly EnumPropertyI<TCameraTriggerSource> triggerSource = new EnumPropertyI<TCameraTriggerSource>() |
An enumerated integer property defining where the trigger signal is expected to occur.
When working with hardware generated signals via mv.impact.acquire.RTCtrProgram objects this property should be set to mv.impact.acquire.TCameraTriggerSource.ctsRTCtrl as otherwise the program will not affect the behaviour of the camera.
Valid values for this property are defined by the enumeration mv.impact.acquire.TCameraTriggerSource.
Property Documentation
◆ componentEnumerable
|
getinherited |
Returns an enumerator that iterates through the collection.
This interface will allow to e.g. write code like this:
{
Console.WriteLine("{0}", c.name);
}
String name
Returns the name of the component referenced by this object.
Definition ComponentAccess.cs:167
IEnumerable< Component > componentEnumerable
Returns an enumerator that iterates through the collection.
Definition ComponentCollection.cs:202
A base class to implement access to internal driver components.
Definition Component.cs:133
See the framework's documentation about the System.Collections.IEnumerable interface for more information.
- Returns
- An enumerator that iterates through the collection
◆ componentListEnumerable
|
getinherited |
Returns an enumerator that iterates through all the mv.impact.acquire.ComponentList elements in the collection.
This interface will allow to e.g. write code like this:
{
Console.WriteLine("{0}", cl.name);
}
IEnumerable< ComponentList > componentListEnumerable
Returns an enumerator that iterates through all the mv.impact.acquire.ComponentList elements in the c...
Definition ComponentCollection.cs:229
A class to provide access to component lists.
Definition ComponentList.cs:14
See the framework's documentation about the System.Collections.IEnumerable interface for more information.
- Returns
- An enumerator that iterates through the collection
◆ hObj
|
getinherited |
Returns a unique identifier for the component collection referenced by this object.
This handle will always reference an object of type mv.impact.acquire.ComponentList.
- Returns
- A unique identifier for the component referenced by this object.