Classes and functions that will be available if the device is used in device specific interface layout. More...
Enumerations | |
| enum | TAcquisitionField { afAuto = 0 , afOdd = 1 , afEven = 2 , afAny = afOdd | afEven } |
| Defines which field triggers the start of the acquisition (deprecated. More... | |
| enum | TAutoControlMode { acmStandard , acmDeviceSpecific } |
| Defines valid auto control modes. More... | |
| enum | TAutoControlSpeed { acsSlow = 0 , acsMedium , acsFast , acsUserDefined } |
| Defines valid auto-control speed modes. More... | |
| enum | TAutoExposureControl { aecOff = 0 , aecOn } |
| Defines valid AEC( Automatic Exposure Control ) modes. More... | |
| enum | TAutoGainControl { agcOff = 0 , agcOn } |
| Defines valid AGC( Automatic Gain Control ) modes. More... | |
| enum | TAutoOffsetCalibration { aocOff = 0 , aocOn } |
| Defines valid offset calibration modes. More... | |
| enum | TBlueFOXDigitalInputThreshold { bfdit2V = 2 , bfdit10V = 10 } |
| Defines valid thresholds( in Volt ) for the digital inputs of the mvBlueFOX cameras. More... | |
| enum | TBlueFOXFooterMode { bffmOff = 0 , bffm64B = 64 , bffm512B = 512 } |
| Defines the footer mode of the mvBlueFOX. More... | |
| enum | TBlueFOXInfoSensorCapabilities { bfiscNone = 0x00000000 , bfiscExposure = 0x00000001 , bfiscExposureAuto = 0x00000002 , bfiscGain = 0x00000004 , bfiscGainAuto = 0x00000008 , bfiscOffset = 0x00000010 , bfiscOffsetAuto = 0x00000020 , bfiscBinning = 0x00000040 , bfiscTrigger = 0x00000080 , bfiscFlash = 0x00000100 , bfiscLineTrigger = 0x00000200 , bfiscShadingCorrection = 0x00000400 , bfiscOverlappedExposure = 0x00000800 , bfiscFrameDelay = 0x00001000 , bfiscLineDelay = 0x00002000 , bfiscAutoControlAOI = 0x00004000 , bfiscAutoControlSpeed = 0x00008000 , bfiscAutoControlDelay = 0x00010000 , bfiscTemperatureSensor = 0x00020000 , bfiscReverseX = 0x00040000 , bfiscReverseY = 0x00080000 , bfiscExposeToFlashDelay = 0x00100000 , bfiscFrameRate = 0x00200000 , bfiscAutoOffsetBlackLevel = 0x00400000 } |
| Defines valid image sensor capabilities. More... | |
| enum | TBlueFOXOffsetAutoBlackSpeed { bfoablFastest = 0 , bfoablVeryFast = 1 , bfoablFast = 2 , bfoablMedium = 3 , bfoablSlow = 4 , bfoablVerySlow = 6 , bfoablSlowest = 7 } |
| Defines Offset Auto Calibration Controller Speed. More... | |
| enum | TBlueFOXSensorTiming { bfstStandard = 0 , bfstFastLineSkip = 1 , bfstLowSmearLineSkip = 2 } |
| Sensor timing options. More... | |
| enum | TBlueFOXTransferSize { bfts16KB = 16 * 1024 , bfts32KB = 32 * 1024 , bfts64KB = 64 * 1024 , bfts128KB = 128 * 1024 , bfts256KB = 256 * 1024 , bfts512KB = 512 * 1024 , bfts1024KB = 1024 * 1024 , bfts2048KB = 2048 * 1024 } |
| Defines the block size used for the USB transfer of the mvBlueFOX. More... | |
| enum | TCameraAoiMode { camFull = 0 , camUser } |
| Defines the camera Aoi modes. More... | |
| enum | TCameraBinningMode { cbmOff = 0x0 , cbmBinningH = 0x1 , cbmBinningV = 0x2 , cbmBinningHV = cbmBinningH | cbmBinningV , cbmBinning3H = 0x10 , cbmBinning3V = 0x20 , cbmBinning3H3V = cbmBinning3H | cbmBinning3V , cbmBinningHAvg = 0x101 , cbmBinningVAvg = 0x102 , cbmBinningHVAvg = cbmBinningHAvg | cbmBinningVAvg , cbmBinning3HAvg = 0x110 , cbmBinning3VAvg = 0x120 , cbmBinning3H3VAvg = cbmBinning3HAvg | cbmBinning3VAvg , cbmDroppingH = 0x1001 , cbmDroppingV = 0x1002 , cbmDroppingHV = cbmDroppingH | cbmDroppingV , cbmDropping3H = 0x1010 , cbmDropping3V = 0x1020 , cbmDropping3H3V = cbmDropping3H | cbmDropping3V } |
| Defines valid binning modes for the camera. More... | |
| enum | TCameraExposeMode { cemStandard = 0 , cemOverlapped , cemNoShutter } |
| Defines recognized camera sensor expose modes. More... | |
| enum | TCameraExternalSyncEdge { ceseNo = 0 , ceseFallingEdge = 1 , ceseRisingEdge = 2 } |
| Some grabbers are able to get the video signal and sync signals ( HD-IN, VD-IN ) on separate lines. The user can define this for non standard cameras (deprecated. More... | |
| enum | TCameraExternalSyncOutput { cesoAuto = 0 , cesoRed = 1 , cesoGreen = 2 , cesoBlue = 3 , cesoExtern = 4 } |
| Some grabbers are able to get the video signal and the sync signal on different input pins. The user can select this for non standard cameras (deprecated. More... | |
| enum | TCameraFlashMode { cfmOff = 0 , cfmDigout0 = 0x1 , cfmDigout1 = 0x2 } |
| Defines valid camera flash modes. More... | |
| enum | TCameraFlashType { cftStandard = 0 , cftRollingShutterFlash = 1 , cftVSync = 2 } |
| Defines valid camera flash control types. More... | |
| enum | TCameraHDRMode { cHDRmFixed0 = 0 , cHDRmFixed1 = 1 , cHDRmFixed2 = 2 , cHDRmFixed3 = 3 , cHDRmFixed4 = 4 , cHDRmFixed5 = 5 , cHDRmFixed6 = 6 , cHDRmUser = 100 } |
| Defines valid camera High Dynamic Range modes. More... | |
| enum | TCameraInterlacedType { citNone , citInterlaced , citInvertedInterlaced } |
| Defines how the camera transmits its video signal (deprecated. More... | |
| enum | TCameraLinkDataValidMode { cldvmActive = 0 , cldvmInactive } |
| Defines how the camera transmits the DVAL signal defined in the CameraLink® standard (deprecated. More... | |
| enum | TCameraPixelClock { cpcStandard = 0 , cpcHighSpeed = 1 , cpc6000KHz = 6000 , cpc8000KHz = 8000 , cpc10000KHz = 10000 , cpc12000KHz = 12000 , cpc13500KHz = 13500 , cpc20000KHz = 20000 , cpc24000KHz = 24000 , cpc24540KHz = 24540 , cpc27000KHz = 27000 , cpc32000KHz = 32000 , cpc37600KHz = 37600 , cpc40000KHz = 40000 , cpc50000KHz = 50000 , cpc57600KHz = 57600 } |
| Defines valid camera pixel frequencies. More... | |
| enum | TCameraScanMode { csmArea = 0 , csmLine } |
| Defines valid scan modes for the a camera. More... | |
| enum | TCameraSerialPortBaudRate { cspbr9600 = 9600 , cspbr19200 = 19200 , cspbr38400 = 38400 , cspbr57600 = 57600 , cspbr115200 = 115200 , cspbr230400 = 230400 , cspbr460800 = 460800 , cspbr921600 = 921600 } |
| Defines valid baud rates for serial port communication between frame grabber and camera (deprecated. More... | |
| enum | TCameraShutterMode { csmFrameShutter = 0 , csmElectronicRollingShutter , csmGlobalResetRelease , csmFrameShutterWithFastCenterReadout } |
| Defines recognized camera sensor shutter modes. More... | |
| enum | TCameraTapsXGeometry { cltxg1X = 0 , cltxg1X2 = 1 , cltxg2X = 2 , cltxg2XE = 3 , cltxg2XM = 4 , cltxg1X3 = 5 , cltxg3X = 6 , cltxg1X4 = 7 , cltxg4X = 8 , cltxg2X2 = 9 , cltxg2X2E = 10 , cltxg2X2M = 11 , cltxg4XE = 12 , cltxg1X8 = 13 , cltxg8X = 14 , cltxg4X2 = 15 , cltxg4X2E = 16 } |
| Multitap cameras can transmit data in different ways. This enum can be used to define how the camera transmits a line of pixels. More... | |
| enum | TCameraTapsYGeometry { cltyg1Y = 0 , cltyg1Y2 = 1 , cltyg2YE = 2 } |
| Multi-tap cameras can transmit data in different ways. This enumeration can be used to define how the camera transmits the lines of pixels. More... | |
| enum | TCameraTestMode { ctmOff = 0 , ctmGreyRamp = 1 , ctmMovingColor = 2 , ctmWBTest = 3 } |
| Defines valid transmission modes for the camera. More... | |
| enum | TCameraTriggerMode { ctmContinuous = 0 , ctmOnDemand , ctmOnLowLevel , ctmOnHighLevel , ctmOnFallingEdge , ctmOnRisingEdge , ctmOnHighExpose , ctmOnLowExpose , ctmOnAnyEdge , ctmFramerateControlled } |
| Defines valid camera sensor trigger modes. More... | |
| enum | TCameraTriggerSource { ctsDigIn0 = 0 , ctsDigIn1 , ctsRTCtrl , ctsDigOut0 , ctsDigOut1 , ctsDigOut2 , ctsDigOut3 } |
| Defined valid camera sensor trigger source values. More... | |
| enum | TClampMode { ecmAuto , ecmUser } |
| Clamp signal means, that an AC coupled video signal is clamped on the porch to get a signal transfer with less noise and independent from the d.c. voltage portion (deprecated. More... | |
| enum | TDeviceAdvancedOptions { daoOff = 0 , daoLowLight = 0x1 , daoEmbeddedImageInfo = 0x2 , daoImageAverage = 0x4 , daoPipelinedGainExposeControl = 0x8 , daoOnDemandTriggerPreShot = 0x10 , daoLowFrameRateOptimization = 0x20 , daoEnablePerChannelOffsetCorrection = 0x40 , daoUseRawSensorGain = 0x80 , daoTriggerSensorColumnCalibration = 0x100 } |
| Defines valid advanced options. More... | |
| enum | TDeviceDigitalOutputMode { ddomManual = 0 , ddomPulse , ddomUser , ddomExposureActive , ddomDigitalSignalPassThrough , ddomDigitalSignalPassThroughInv , ddomInternalVD , ddomRealTimeController , ddomExposureAndAcquisitionActive , ddomTemperatureOutOfRange } |
| Defines grabber specific digital output modes. More... | |
| enum | TDeviceImageTrigger { ditImmediately = 0 , ditAfterDigOutSignals } |
| Defines acquisition start event if using pulse sequences (deprecated. More... | |
| enum | TDevicePowerMode { dpmOn , dpmOff } |
| Defines the power mode for this device. More... | |
| enum | TDeviceScanRateMode { dsrmAuto , dsrmUser } |
| Defines valid device scan rate mode. More... | |
| enum | TDeviceSignalOutputStartEvent { dsoseFrame , dsoseTrigger , dsoseFrameAfterTrigger , dsoseSyncInRisingEdge , dsoseSyncInFallingEdge , dsoseSyncInPassThrough , dsoseSyncInPassThroughInv , dsosePeriodically , dsoseTriggerInPassThrough , dsoseTriggerInPassThroughInv , dsoseFVALPassThrough , dsoseFVALPassThroughInv , dsoseFVALRisingEdge } |
| Defines valid moments to start the signal generation on the digital outputs. More... | |
| enum | TDeviceSyncOutMode { dsomOff = 0 , dsomNonInterlaced , dsomInterlaced } |
| Valid sync. signal output modes for frame grabbers. More... | |
| enum | TDeviceTriggerInterface { dtiStandard = 0 , dtiAdvanced } |
| Defines which trigger interface is currently active for the device. More... | |
| enum | TDeviceTriggerMode { dtmOff = 0 , dtmOn , dtmFallingEdge , dtmRisingEdge , dtmPeriodically , dtmOnDemand , dtmStartRisingStopFalling , dtmStartFallingStopRising , dtmLevelHigh , dtmLevelLow } |
| Valid trigger modes for frame grabber boards. More... | |
| enum | TDeviceTriggerOverlap { dtoOff , dtoReadOut , dtoPreviousFrame } |
| Specifies the type trigger overlap permitted with the previous frame. More... | |
| enum | TDigIOState { digioOff = 0 , digioOn = 1 , digioIgnore = 2 , digioKeep = 3 } |
| Defines valid digital I/O states. More... | |
| enum | TDigitalIOMeasurementMode { diommFrequency_Hz_10ms = 0 , diommFrequency_Hz_100ms } |
| Defines valid IO Measurement Modes. More... | |
| enum | TDigitalIOMeasurementSource { diomsInput0 = 0 , diomsInput1 = 1 , diomsInput2 = 2 , diomsInput3 = 3 } |
| Defines valid IO Measurement Sources. More... | |
| enum | TDigitalOutputControlMode { docmSoftware = 0 , docmRTC } |
| Defines valid ways to create signals on a digital output (deprecated. More... | |
| enum | TDigitalSignal { dsNone = 0x00000000 , dsSignal1 = 0x00000001 , dsSignal2 = 0x00000002 , dsSignal3 = 0x00000004 , dsSignal4 = 0x00000008 , dsSignal5 = 0x00000010 , dsSignal6 = 0x00000020 , dsSignal7 = 0x00000040 , dsSignal8 = 0x00000080 , dsSignal9 = 0x00000100 , dsSignal10 = 0x00000200 , dsSignal11 = 0x00000400 , dsSignal12 = 0x00000800 , dsSignal13 = 0x00001000 , dsSignal14 = 0x00002000 , dsSignal15 = 0x00004000 , dsSignal16 = 0x00008000 } |
| Defines valid digital source signal constants that can be used to configure a devices behaviour in certain digital I/O related modes (deprecated. More... | |
| enum | TFieldGateMode { efmAuto , efmUser } |
| The field gate is used to detect the field ( odd or even ) for interlaced video signals (deprecated. More... | |
| enum | TI2COperationMode { I2ComRead = 0 , I2ComWrite } |
| Valid I2C operation modes. More... | |
| enum | TI2COperationStatus { I2CosSuccess = 0 , I2CosFailure , I2CosInvalidDeviceAddress , I2CosInvalidDeviceSubAddress , I2CosTooMuchData , I2CosNotEnoughData } |
| Valid I2C operation status values. More... | |
| enum | TInfoSensorColorMode { iscmUnknown = 0 , iscmMono , iscmBayer , iscmColor , iscmNIR } |
| Defines the type of camera sensor. More... | |
| enum | TInfoSensorColorPattern { iscpGreenRed , iscpRedGreen , iscpBlueGreen , iscpGreenBlue , iscpUnknown } |
| Defines the bayer pattern of the sensor. More... | |
| enum | TInfoSensorType { istUnknown = 0 , istCCD = 0x1 , istCMOS = 0x2 } |
| Defines the type of camera sensor. More... | |
| enum | TInterlacedMode { imOn = 0 , imOff = 1 } |
| Defines how to handle interlaced image data (deprecated. More... | |
| enum | TLineCounter { lcOff = 0 , lcOn = 1 } |
| Currently available for mvTITAN/mvGAMMA-CL (deprecated. More... | |
| enum | TOnBoardMemoryMode { obmmDefault , obmmUser } |
| Defines valid modes for the handling of the device' on board memory (if available) (deprecated. More... | |
| enum | TPulseStartTrigger { pstDigitalSignal = 0 , pstPeriodically , pstRotaryDecoder } |
| Defines valid pulse start trigger values. More... | |
| enum | TRTCtrlModes { rtctrlModeStop , rtctrlModeRun , rtctrlModeRunRestart } |
| Defines valid RTCtrl Modes. More... | |
| enum | TRTProgOpCodes { rtctrlProgNop , rtctrlProgSetDigout , rtctrlProgWaitDigin , rtctrlProgWaitClocks , rtctrlProgJumpLoc , rtctrlProgTriggerSet , rtctrlProgTriggerReset , rtctrlProgExposeSet , rtctrlProgExposeReset , rtctrlProgFrameNrReset , rtctrlProgJumpLocOnZero , rtctrlProgJumpLocOnNotZero , rtctrlProgRegisterSet , rtctrlProgRegisterAdd , rtctrlProgRegisterSub } |
| Defines valid RTProg OpCodes. More... | |
| enum | TScanClock { scAuto , scAnalogue , scDigital } |
| Analogue grabbers generate its scan clock on different ways (deprecated. More... | |
| enum | TScanStandard { ssITU601 , ssSquare , ssUser } |
| Defines valid scan modes for standard cameras (deprecated. More... | |
| enum | TTriggerMoment { tmOnFallingEdge = 0 , tmOnRisingEdge } |
| Defines a trigger moment for a digital signal. More... | |
| enum | TVirtualDeviceImageType { vditNone = 0x00000000 , vditBMP = 0x000000001 , vditPGM = 0x000000002 , vditPNG = 0x000000004 , vditJPG = 0x000000008 , vditTIFF = 0x000000010 , vditALL = vditBMP | vditPGM | vditPNG | vditJPG | vditTIFF } |
| Defines valid image types used when capturing data from a certain directory. More... | |
| enum | TVirtualDeviceTestMode { vdtmMovingRGBx888PackedImage , vdtmMovingRGB888PackedImage , vdtmMovingRGBx888PlanarImage , vdtmMovingMonoRamp , vdtmMovingYUV422PackedRamp , vdtmMovingYUV422PlanarRamp , vdtmMovingRGB101010PackedImage , vdtmMovingRGB121212PackedImage , vdtmMovingRGB141414PackedImage , vdtmMovingRGB161616PackedImage , vdtmMovingBayerDataRamp , vdtmBayerWhiteBalanceTestImage , vdtmImageDirectory , vdtmLeakyPixelTestImageMono8Bayer , vdtmMovingYUV422_UYVYPackedRamp , vdtmHorizontalMonoRamp , vdtmVerticalMonoRamp , vdtmMovingVerticalMonoRamp , vdtmHorizontalMono12Packed_V2Ramp , vdtmMovingBGR888PackedImage , vdtmMovingYUV444PackedRamp , vdtmMovingYUV444_UYVPackedRamp , vdtmMovingBGRPacked_V2Image , vdtmEmptyMonoBuffer , vdtmHorizontalMono12Packed_V1Ramp , vdtmHorizontalBayer12Packed_V1Ramp , vdtmHorizontalBayer12Packed_V2Ramp , vdtmMovingYUV411_UYYVYY_PackedRamp , vdtmMovingRGB888PlanarImage , vdtmHotAndColdPixelTestImageBayer , vdtmHotAndColdPixelTestImageRGB888Packed } |
| Defines valid test modes for virtual devices. More... | |
Detailed Description
Classes and functions that will be available if the device is used in device specific interface layout.
This group contains functions and data types that are available for all interface layouts.
Enumeration Type Documentation
◆ TAcquisitionField
| enum TAcquisitionField |
Defines which field triggers the start of the acquisition (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | ||
|---|---|---|
| afAuto | 0 | Controlled by the camera parameter.
|
| afOdd | 1 | Only odd fields will be digitised.
|
| afEven | 2 | Only even fields will be digitised.
|
| afAny | afOdd | afEven | Odd and even fields will be digitised.
|
◆ TAutoControlMode
| enum TAutoControlMode |
Defines valid auto control modes.
| Enumerator | |
|---|---|
| acmStandard | The standard auto control mode. |
| acmDeviceSpecific | A device specific auto control mode. mvBlueFOX specific: For mvBlueFOX devices of type 202b and 202d the operation in device specific AEC/AGC mode is limited in (non continuous)triggered-modes. AEC/AGC only works while the trigger signal is active. As these sensor types only support the trigger modes ctmOnHighLevel and ctmOnLowLevel 'active' means that the required signal level for that mode(either high or low) is present. When this signal level is no longer present AEC/AGC will stop working and gain and exposure will be set to a static value. This is due to a limitation of the sensor chip. Effectively this means that for single frame triggering requiring short active pulses AEC/AGC is not possible. |
◆ TAutoControlSpeed
| enum TAutoControlSpeed |
Defines valid auto-control speed modes.
Auto control speed modes define the time in which the controller tries to adapt its parameters to reach the desired result.
◆ TAutoExposureControl
| enum TAutoExposureControl |
◆ TAutoGainControl
| enum TAutoGainControl |
◆ TAutoOffsetCalibration
◆ TBlueFOXDigitalInputThreshold
Defines valid thresholds( in Volt ) for the digital inputs of the mvBlueFOX cameras.
◆ TBlueFOXFooterMode
| enum TBlueFOXFooterMode |
◆ TBlueFOXInfoSensorCapabilities
Defines valid image sensor capabilities.
These enums may be 'ored' together.
◆ TBlueFOXOffsetAutoBlackSpeed
Defines Offset Auto Calibration Controller Speed.
These are relative values, that might result in a different behaviour depending on the sensor type used.
◆ TBlueFOXSensorTiming
| enum TBlueFOXSensorTiming |
Sensor timing options.
◆ TBlueFOXTransferSize
| enum TBlueFOXTransferSize |
Defines the block size used for the USB transfer of the mvBlueFOX.
◆ TCameraAoiMode
| enum TCameraAoiMode |
◆ TCameraBinningMode
| enum TCameraBinningMode |
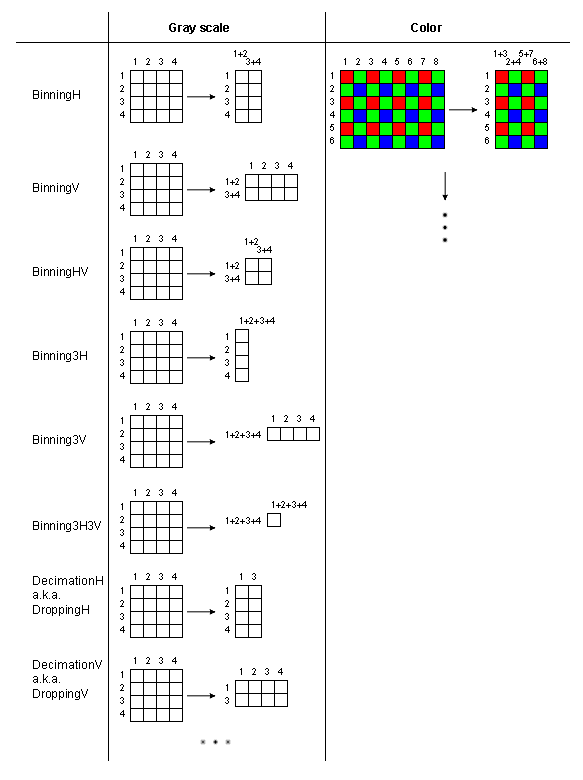
Defines valid binning modes for the camera.
- Note
- Binning might be available for color sensors that do not support color binning. This will result in incorrect color information when the data is converted from a Bayer sensor. However under some circumstances this feature might be useful (e.g. when taking image in a very dark surrounding or at night where almost no color information will be contained in the image anyway thus resulting in useful images again). Therefore this feature has deliberately left available.
| Enumerator | ||
|---|---|---|
| cbmOff | 0x0 | No Binning. |
| cbmBinningH | 0x1 | Horizontal Binning (combines 2 adjacent columns). |
| cbmBinningV | 0x2 | Vertical Binning (combines 2 adjacent rows). |
| cbmBinningHV | cbmBinningH | cbmBinningV | Combines cbmBinningH and cbmBinningV. |
| cbmBinning3H | 0x10 | Horizontal Binning (combines 4 adjacent columns). |
| cbmBinning3V | 0x20 | Vertical Binning (combines 4 adjacent rows). |
| cbmBinning3H3V | cbmBinning3H | cbmBinning3V | Combines cbmBinning3H and cbmBinning3V. |
| cbmBinningHAvg | 0x101 | Horizontal Binning with average (combines 2 adjacent columns and averages the result). |
| cbmBinningVAvg | 0x102 | Vertical Binning with average (combines 2 adjacent rows and averages the result). |
| cbmBinningHVAvg | cbmBinningHAvg | cbmBinningVAvg | Combines cbmBinningH and cbmBinningV. |
| cbmBinning3HAvg | 0x110 | Horizontal Binning with average (combines 4 adjacent columns and averages the result). |
| cbmBinning3VAvg | 0x120 | Vertical Binning with average (combines 4 adjacent rows and averages the result). |
| cbmBinning3H3VAvg | cbmBinning3HAvg | cbmBinning3VAvg | Combines cbmBinning3H and cbmBinning3V. |
| cbmDroppingH | 0x1001 | Horizontal Dropping (drops every second column). |
| cbmDroppingV | 0x1002 | Vertical Dropping (drops every second row). |
| cbmDroppingHV | cbmDroppingH | cbmDroppingV | Combines cbmDroppingH and cbmDroppingV. |
| cbmDropping3H | 0x1010 | Horizontal Dropping (drops 3 adjacent columns out of 4). |
| cbmDropping3V | 0x1020 | Vertical Binning (drops 3 adjacent rows out of 4). |
| cbmDropping3H3V | cbmDropping3H | cbmDropping3V | Combines cbmDropping3H and cbmDropping3V. |
◆ TCameraExposeMode
| enum TCameraExposeMode |
Defines recognized camera sensor expose modes.
| Enumerator | ||
|---|---|---|
| cemStandard | 0 | Standard sequential mode. In this mode the sensor first is exposed and then afterwards the image readout is performed. |
| cemOverlapped | Overlapped mode, expose during image readout. This only affects the behaviour of the acquisition in TCameraTriggerMode is set to ctmContinuous. In this mode the flash output should NOT be used. In any case the flash output will NOT work like in cemStandard but only a short pulse will be sent to the output. | |
| cemNoShutter | 'No shutter' mode, switch off exposure control. This only affects the behaviour of the acquisition in TCameraTriggerMode is set to ctmContinuous. In this case the shutter of the camera is never closed. Thus the exposure time in this mode is equal to the reciprocal value of the current frame rate. | |
◆ TCameraExternalSyncEdge
Some grabbers are able to get the video signal and sync signals ( HD-IN, VD-IN ) on separate lines. The user can define this for non standard cameras (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | ||
|---|---|---|
| ceseNo | 0 |
|
| ceseFallingEdge | 1 |
|
| ceseRisingEdge | 2 |
|
◆ TCameraExternalSyncOutput
Some grabbers are able to get the video signal and the sync signal on different input pins. The user can select this for non standard cameras (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | ||
|---|---|---|
| cesoAuto | 0 | The sync signal is expected on the selected video channel. If RGB is used the sync signal is expected on the 'green' channel ( SyncOnGreen ).
|
| cesoRed | 1 | The sync signal is expected on the first ('red') video channel ( mvTITAN-RGB only ).
|
| cesoGreen | 2 | The sync signal is expected on the second ('green') video channel ( mvTITAN-RGB only ).
|
| cesoBlue | 3 | The sync signal is expected on the third ('blue') video channel ( mvTITAN-RGB only ).
|
| cesoExtern | 4 | The sync signal is expected on the fourth ('extern') video channel ( mvTITAN-RGB only ).
|
◆ TCameraFlashMode
| enum TCameraFlashMode |
◆ TCameraFlashType
| enum TCameraFlashType |
Defines valid camera flash control types.
| Enumerator | ||
|---|---|---|
| cftStandard | 0 | Flash signal is on while the shutter is open on a frame shutter sensor or during the complete exposure period of a rolling shutter sensor. |
| cftRollingShutterFlash | 1 | Flash signal is only on during the time all lines of a rolling shutter sensor are exposed. This time is always smaller or equal to the time defined by cftStandard. |
| cftVSync | 2 | Flash signal is derived from the sensors internal VSync (Frame-sync. signal). The specific timing of this signal is hardware dependent. The signal can be used to synchronize a master camera with a flash or another camera with a rolling shutter sensor. |
◆ TCameraHDRMode
| enum TCameraHDRMode |
Defines valid camera High Dynamic Range modes.
◆ TCameraInterlacedType
Defines how the camera transmits its video signal (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | |
|---|---|
| citNone | The video signal is transmitted non interlaced, meaning that a complete image is transferred without interruption.
|
| citInterlaced | The video signal is transferred interlaced.
Here the camera transmits the video signal in two consecutive frames that form a complete image. The first frame contains all the even lines (0, 2, 4, ... ) of the image, while the second frame contains all odd lines of the image. |
| citInvertedInterlaced | The video signal is transferred interlaced with the two frames in reversed order.
Here the camera transmits the video signal in two consecutive frames that form a complete image. The first frame contains all the odd lines (0, 2, 4, ... ) of the image, while the second frame contains all even lines of the image. |
◆ TCameraLinkDataValidMode
Defines how the camera transmits the DVAL signal defined in the CameraLink® standard (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | ||
|---|---|---|
| cldvmActive | 0 | The camera transmits a data valid (DVAL) signal, that should be evaluated by the frame grabber.
|
| cldvmInactive | The camera does not transmit a data valid (DVAL) signal, that should be evaluated by the frame grabber.
| |
◆ TCameraPixelClock
| enum TCameraPixelClock |
Defines valid camera pixel frequencies.
◆ TCameraScanMode
| enum TCameraScanMode |
◆ TCameraSerialPortBaudRate
Defines valid baud rates for serial port communication between frame grabber and camera (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | ||
|---|---|---|
| cspbr9600 | 9600 | 9600 baud
|
| cspbr19200 | 19200 | 19200 baud
|
| cspbr38400 | 38400 | 38400 baud
|
| cspbr57600 | 57600 | 57600 baud
|
| cspbr115200 | 115200 | 115200 baud
|
| cspbr230400 | 230400 | 230400 baud
|
| cspbr460800 | 460800 | 460800 baud
|
| cspbr921600 | 921600 | 921600 baud
|
◆ TCameraShutterMode
| enum TCameraShutterMode |
Defines recognized camera sensor shutter modes.
◆ TCameraTapsXGeometry
| enum TCameraTapsXGeometry |
Multitap cameras can transmit data in different ways. This enum can be used to define how the camera transmits a line of pixels.
◆ TCameraTapsYGeometry
| enum TCameraTapsYGeometry |
Multi-tap cameras can transmit data in different ways. This enumeration can be used to define how the camera transmits the lines of pixels.
| Enumerator | ||
|---|---|---|
| cltyg1Y | 0 | Lines from top to bottom. |
| cltyg1Y2 | 1 | Two neighbouring lines are transmitted during one FVAL. |
| cltyg2YE | 2 | One line from top and one line from bottom are transmitted during one FVAL. |
◆ TCameraTestMode
| enum TCameraTestMode |
Defines valid transmission modes for the camera.
| Enumerator | ||
|---|---|---|
| ctmOff | 0 | The 'normal' camera image will be transmitted. |
| ctmGreyRamp | 1 | A grey gradient will be transmitted by the camera. |
| ctmMovingColor | 2 | A color test image with some moving components in it will be displayed. |
| ctmWBTest | 3 | A raw white Bayer image will be transmitted. |
◆ TCameraTriggerMode
| enum TCameraTriggerMode |
Defines valid camera sensor trigger modes.
| Enumerator | ||
|---|---|---|
| ctmContinuous | 0 | Don't wait for trigger. In this mode the camera continuously exposes images with the current settings. However images are not transferred to the host system automatically in this mode, so NO CPU load or whatsoever is produced in this mode when the driver isn't asked for images by the user. This mode is recommended for most applications and will be available for every image sensor. When the user requests an image the image AFTER the next frame start will be returned. In applications that need fast but NOT continuous image transfer the ctmOnDemand therefore might be more interesting. |
| ctmOnDemand | Start frame expose when the software asks for an image. Here without image requests by the user the image sensor will not expose images. An exposure and image transmission will start immediately after at least one images has been requested by the user. When e.g. a camera in free running mode captures 30 images per sec. and the user needs an image every 40 ms (25 fps) this mode might be more suitable than ctmContinuous as in the continuous mode when asking for an image every 40 ms the user might need to wait for the next frame start which at 30 Hz in the worst case would result in a capture time of (1/30Hz)*2 = 66.6 ms when an image start has just been missed. In ctmOnDemand however the image exposure will be started immediately after the request reaches the camera thus no delay will be introduced.
| |
| ctmOnLowLevel | Start the exposure of a frame when the trigger input is below the trigger threshold. Each time an image is requested and the trigger signal is below the trigger threshold a image will be captured. | |
| ctmOnHighLevel | Start the exposure of a frame when the trigger input is above the trigger threshold. Each time an image is requested and the trigger signal is above the trigger threshold a image will be captured. | |
| ctmOnFallingEdge | Start the exposure of a frame when the trigger input level changes from high to low. | |
| ctmOnRisingEdge | Start the exposure of a frame when the trigger input level changes from low to high. | |
| ctmOnHighExpose | Start frame expose when the trigger input level rises above the trigger threshold and expose while the trigger input level remains above this threshold. | |
| ctmOnLowExpose | Start frame expose when the trigger input level falls below the trigger threshold and expose while the trigger input level remains below this threshold. | |
| ctmOnAnyEdge | Start the exposure of a frame when the trigger input level changes from high to low or from low to high. | |
| ctmFramerateControlled | Start the exposure of a frame when the trigger input level changes from high to low or from low to high. This mode is behaves like ctmContinuous but allows the FPS-Rate to be controlled directly. | |
◆ TCameraTriggerSource
| enum TCameraTriggerSource |
Defined valid camera sensor trigger source values.
| Enumerator | ||
|---|---|---|
| ctsDigIn0 | 0 | Uses digital input 0 as the source for the trigger signal. |
| ctsDigIn1 | Use digital input 1 as the source for the trigger signal. | |
| ctsRTCtrl | Use real time controller (RTCtrl) as the source for the trigger signal. | |
| ctsDigOut0 | Uses digital output 0 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)). | |
| ctsDigOut1 | Uses digital output 1 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)). | |
| ctsDigOut2 | Uses digital output 2 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)). | |
| ctsDigOut3 | Uses digital output 3 as the source for the trigger signal (this allows a SW controlled trigger (or exposure)). | |
◆ TClampMode
| enum TClampMode |
Clamp signal means, that an AC coupled video signal is clamped on the porch to get a signal transfer with less noise and independent from the d.c. voltage portion (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
The clamp pulse width is always 0.5 micro sec.
| Enumerator | |
|---|---|
| ecmAuto | Clamp pulse starts at 80 % of ActiveVideoAoi/X.
|
| ecmUser | The user can set the clamp start time in micro sec. after the falling edge of the video signals' VSync.
|
◆ TDeviceAdvancedOptions
Defines valid advanced options.
These enums may be 'ored' together.
| Enumerator | ||
|---|---|---|
| daoOff | 0 | No advanced option selected. |
| daoLowLight | 0x1 | Put camera in low light mode. This is a special feature offered by some sensors. Typically this will enable an additional analogue gain that will increase both the luminance and the noise of the resulting image. This feature can not be configured any further and there also is no additional information available on this topic. |
| daoEmbeddedImageInfo | 0x2 | Embed sensor specific info into the image readout buffer. |
| daoImageAverage | 0x4 | Calculate the average intensity value of the image and return as part of the request. |
| daoPipelinedGainExposeControl | 0x8 | Enable pipelined Gain/Exposure control. This will result in a changed exposure or gain value becoming active not with the next frame but the one after that. Changing Gain/Exposure will be faster in pipelined Gain/Exposure control mode.
|
| daoOnDemandTriggerPreShot | 0x10 | Enable on demand trigger pre-shot option. This will trigger an internal image capture cycle on the sensor prior to the user requested frame. Can be used to remove variations in image quality when working with unstable frame rates.
|
| daoLowFrameRateOptimization | 0x20 | Enable low frame rate optimization. This will result in a much reduced variation in the offset signal when changing the sensor frame rate or running the sensor at low frame rates. The offset will change slightly if switched on and the signal response is slightly reduced. |
| daoEnablePerChannelOffsetCorrection | 0x40 | Enable per channel offset correction. Allow per channel offset correction in non auto offset mode for sensors with a Bayer (RGGB) based analog path. The per channel offset value will be added to the master offset (Offset_pc). |
| daoUseRawSensorGain | 0x80 | Enable raw sensor gain. Use mathematical correct gain for sensor setting. Thus increasing the gain by 6 dB will actually result in a factor of 2. However with this option enabled the gain range will include values so low that the pixel saturation charge will be with in ADC digitizer range thus an over-saturated image will contain pixels that do NOT contain the maximum value for the given pixel format.
|
| daoTriggerSensorColumnCalibration | 0x100 | Trigger sensor column correction. When switched on this triggers a single column correction calibration process when requesting an image. To do it again switch it off and on again. This should be done while no acquisition is running. Changing gain or AOI could make such a recalibration necessary. |
◆ TDeviceDigitalOutputMode
Defines grabber specific digital output modes.
| Enumerator | ||
|---|---|---|
| ddomManual | 0 | The digital output can be switched manually. |
| ddomPulse | A single pulse will be generated on the digital output. | |
| ddomUser | A user defined signal will be generated on the digital output. | |
| ddomExposureActive | The digital output will change its state during the active exposure period of the image sensor and will switch back to its initial state again once the exposure period is over. | |
| ddomDigitalSignalPassThrough | A signal connected to a digital input is passed through to this digital output. | |
| ddomDigitalSignalPassThroughInv | A signal connected to a digital input is inverted and passed to this digital output. | |
| ddomInternalVD | An internal VD sync. signal will be passed to this digital output. In case of a camera this e.g. might be the cameras internal VD signal. This then can be used to synchronize two or more cameras. | |
| ddomRealTimeController | The digital output is controlled by a Real Time Controller. | |
| ddomExposureAndAcquisitionActive | When there is at least one outstanding request the digital output will change its state during the active exposure period of the image sensor and will switch back to its initial state again once the exposure period is over. | |
| ddomTemperatureOutOfRange | Will change the state whenever the device temperature moves in or out of defined limits(subject to change!). | |
◆ TDeviceImageTrigger
| enum TDeviceImageTrigger |
Defines acquisition start event if using pulse sequences (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | ||
|---|---|---|
| ditImmediately | 0 | Acquisition starts with trigger event as fast as possible.
|
| ditAfterDigOutSignals | Acquisition starts after all defined signals have been generated on the digital outputs.
| |
◆ TDevicePowerMode
| enum TDevicePowerMode |
◆ TDeviceScanRateMode
| enum TDeviceScanRateMode |
◆ TDeviceSignalOutputStartEvent
Defines valid moments to start the signal generation on the digital outputs.
| Enumerator | |
|---|---|
| dsoseFrame | The signal generation on the digital outputs starts with the next frame start signal ( e.g.: VSync ). |
| dsoseTrigger | The signal generation on the digital outputs starts with the event defined in setting->camera->trigger. |
| dsoseFrameAfterTrigger | The signal generation on the digital outputs starts with next frame signal after the event defined in setting->camera->trigger. |
| dsoseSyncInRisingEdge | The signal generation on the digital outputs starts with the rising edge of SyncIn - signal. CameraLink® only!!! |
| dsoseSyncInFallingEdge | The signal generation on the digital outputs starts with the falling edge of SyncIn - signal. CameraLink® only!!! |
| dsoseSyncInPassThrough | The SyncIn - signal is passed to the selected digital output. CameraLink® only!!! |
| dsoseSyncInPassThroughInv | The SyncIn - signal is inverted and passed to the selected digital output. CameraLink® only!!! |
| dsosePeriodically | The signal generation on the digital outputs starts periodically. CameraLink® only!!! |
| dsoseTriggerInPassThrough | The TriggerIn - signal is passed to the selected digital output. CameraLink® only!!! |
| dsoseTriggerInPassThroughInv | The TriggerIn - signal is inverted and passed to the selected digital output. CameraLink® only!!! |
| dsoseFVALPassThrough | The FVAL - signal is passed to the selected digital output. CameraLink® only!!! |
| dsoseFVALPassThroughInv | The FVAL - signal is inverted and passed to the selected digital output. CameraLink® only!!! |
| dsoseFVALRisingEdge | The signal generation on the digital outputs starts with the rising edge of FVAL - signal. CameraLink® only!!! |
◆ TDeviceSyncOutMode
| enum TDeviceSyncOutMode |
◆ TDeviceTriggerInterface
Defines which trigger interface is currently active for the device.
A device might offer different views on the properties that can be used to configure trigger signals and events.
| Enumerator | ||
|---|---|---|
| dtiStandard | 0 | The standard trigger interface. When this trigger interface is used, the configuration of an external trigger signal can be done very easy. However more complex scenarios might not be possible using this view on the trigger configuration. |
| dtiAdvanced | The advanced view on the trigger interface. When this view on the interface is selected, all features offered by the device regarding the creation of trigger events will be visible. So more complex configurations are possible but more knowledge about the hardware is required as well. | |
◆ TDeviceTriggerMode
| enum TDeviceTriggerMode |
Valid trigger modes for frame grabber boards.
| Enumerator | ||
|---|---|---|
| dtmOff | 0 | Trigger off. |
| dtmOn | Trigger on. | |
| dtmFallingEdge | Trigger on falling edge of an external signal. | |
| dtmRisingEdge | Trigger on rising edge of an external signal. | |
| dtmPeriodically | Timer is used to simulate trigger. | |
| dtmOnDemand | Request simulates trigger. | |
| dtmStartRisingStopFalling | Line scan mode: Acquisition starts with rising edge and stops with falling edge of trigger ( mvTITAN/mvGAMMA-CL only ). | |
| dtmStartFallingStopRising | Line scan mode: Acquisition starts with falling edge and stops with rising edge of trigger ( mvTITAN/mvGAMMA-CL only ). | |
| dtmLevelHigh | Trigger valid as long as the level of the source signal is high. | |
| dtmLevelLow | Trigger valid as long as the level of the source signal is low. | |
◆ TDeviceTriggerOverlap
Specifies the type trigger overlap permitted with the previous frame.
This defines when a valid trigger will be accepted (or latched) for a new frame.
| Enumerator | |
|---|---|
| dtoOff | No trigger overlap is permitted. |
| dtoReadOut | Trigger is accepted immediately after the exposure period. |
| dtoPreviousFrame | Trigger is accepted at any time during the capture of the previous frame. |
◆ TDigIOState
| enum TDigIOState |
◆ TDigitalIOMeasurementMode
Defines valid IO Measurement Modes.
The shorter the gate time the faster results will be available. However a shorter gate time will also result in a less accurate measurement.
| Enumerator | ||
|---|---|---|
| diommFrequency_Hz_10ms | 0 | Measure frequency with a 10 ms gate time. |
| diommFrequency_Hz_100ms | Measure frequency with a 100 ms gate time. | |
◆ TDigitalIOMeasurementSource
Defines valid IO Measurement Sources.
This will define where the actual measurement will take place.
| Enumerator | ||
|---|---|---|
| diomsInput0 | 0 | Measurement will be done on digital input 0. |
| diomsInput1 | 1 | Measurement will be done on digital input 1. |
| diomsInput2 | 2 | Measurement will be done on digital input 2. |
| diomsInput3 | 3 | Measurement will be done on digital input 3. |
◆ TDigitalOutputControlMode
Defines valid ways to create signals on a digital output (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | ||
|---|---|---|
| docmSoftware | 0 | The digital output signal is generated by the on-board processor.
|
| docmRTC | The digital output signal is generated by a Real Time Controller that is part of the used hardware device.
| |
◆ TDigitalSignal
| enum TDigitalSignal |
Defines valid digital source signal constants that can be used to configure a devices behaviour in certain digital I/O related modes (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
As these parameters are highly device dependent, no direct name like dsTriggerJ8/12 are defined here. However when the translation dictionary for a property with this type is queried, the string representation for the enumeration value will contain a more descriptive name for the digital signal.
| Enumerator | ||
|---|---|---|
| dsNone | 0x00000000 | A dummy value to delete a mask or signal configuration.
|
| dsSignal1 | 0x00000001 | A constant for digital signal 1.
|
| dsSignal2 | 0x00000002 | A constant for digital signal 2.
|
| dsSignal3 | 0x00000004 | A constant for digital signal 3.
|
| dsSignal4 | 0x00000008 | A constant for digital signal 4.
|
| dsSignal5 | 0x00000010 | A constant for digital signal 5.
|
| dsSignal6 | 0x00000020 | A constant for digital signal 6.
|
| dsSignal7 | 0x00000040 | A constant for digital signal 7.
|
| dsSignal8 | 0x00000080 | A constant for digital signal 8.
|
| dsSignal9 | 0x00000100 | A constant for digital signal 9.
|
| dsSignal10 | 0x00000200 | A constant for digital signal 10.
|
| dsSignal11 | 0x00000400 | A constant for digital signal 11.
|
| dsSignal12 | 0x00000800 | A constant for digital signal 12.
|
| dsSignal13 | 0x00001000 | A constant for digital signal 13.
|
| dsSignal14 | 0x00002000 | A constant for digital signal 14.
|
| dsSignal15 | 0x00004000 | A constant for digital signal 15.
|
| dsSignal16 | 0x00008000 | A constant for digital signal 16.
|
◆ TFieldGateMode
| enum TFieldGateMode |
The field gate is used to detect the field ( odd or even ) for interlaced video signals (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | |
|---|---|
| efmAuto | Field gate starts at 1/3 of a line and ends at 2/3 of a line.
|
| efmUser | FieldGateStart and FieldGateWidth can be set in pixels.
|
◆ TI2COperationMode
| enum TI2COperationMode |
◆ TI2COperationStatus
| enum TI2COperationStatus |
Valid I2C operation status values.
| Enumerator | ||
|---|---|---|
| I2CosSuccess | 0 | The last I2C operation was successful. |
| I2CosFailure | The last I2C operation did fail. The log-file might contain additional information. | |
| I2CosInvalidDeviceAddress | During the execution of the last I2C operation an invalid device address was specified. | |
| I2CosInvalidDeviceSubAddress | During the execution of the last I2C operation an invalid device sub-address was specified. This can either be caused by an invalid address or by an invalid address width. | |
| I2CosTooMuchData | During the execution of the last I2C operation too much data was either requested or sent. | |
| I2CosNotEnoughData | During the execution of the last I2C operation the amount of data requested or sent was too small. | |
◆ TInfoSensorColorMode
| enum TInfoSensorColorMode |
◆ TInfoSensorColorPattern
Defines the bayer pattern of the sensor.
| Enumerator | |
|---|---|
| iscpGreenRed | This sensor starts to transmit a green pixel from a green and red line. The raw image therefore is structured like this: GRGRGRGRGRGRG etc. |
| iscpRedGreen | This sensor starts to transmit a red pixel from a green and red line. The raw image therefore is structured like this: RGRGRGRGRGRGR etc. |
| iscpBlueGreen | This sensor starts to transmit a green pixel from a green and blue line. The raw image therefore is structured like this: GBGBGBGBGBGBG etc. |
| iscpGreenBlue | This sensor starts to transmit a blue pixel from a green and blue line. The raw image therefore is structured like this: BGBGBGBGBGBGB etc. |
| iscpUnknown | Nothing is known about the way the sensor transmits data. |
◆ TInfoSensorType
| enum TInfoSensorType |
◆ TInterlacedMode
| enum TInterlacedMode |
Defines how to handle interlaced image data (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
Image data might be transmitted as fields. These later can either be combined back into a full frame or can be handled individually.
| Enumerator | ||
|---|---|---|
| imOn | 0 | Enable the interlaced function.
The device will re-construct the interlaced data into a full frame. InvInterlaced/Interlaced is controlled by the camera parameter. |
| imOff | 1 | Disable the interlaced function.
|
◆ TLineCounter
| enum TLineCounter |
Currently available for mvTITAN/mvGAMMA-CL (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
If lcOn is used RequestInfo::lineCounter will contain the overall line count.
mvTITAN/mvGAMMA-CL: The counter is implemented in the hardware. All incoming lines will be counted. A detected signal on the trigger input will reset the counter. In addition to the result the line count will be encoded in bit 0 of the first 32 Words (2-byte) of every line (watermark).
To decode the line counter from a line of image data something like this is needed(pseudo-code):
| Enumerator | ||
|---|---|---|
| lcOff | 0 | Disables line counter.
|
| lcOn | 1 | Enables line counter.
|
◆ TOnBoardMemoryMode
| enum TOnBoardMemoryMode |
Defines valid modes for the handling of the device' on board memory (if available) (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | |
|---|---|
| obmmDefault | The device will work with reasonable default values.
This option will be the right choice for most of the user. |
| obmmUser | The user can define how the on board memory of the device will be used.
This is for advanced users only and will not be necessary in most of the cases. |
◆ TPulseStartTrigger
| enum TPulseStartTrigger |
Defines valid pulse start trigger values.
| Enumerator | ||
|---|---|---|
| pstDigitalSignal | 0 | Changes on one or more digital inputs will trigger the output of the pulse or pulse sequence. |
| pstPeriodically | The output of a pulse or pulse sequence will be done periodically. | |
| pstRotaryDecoder | The output of a rotary decoder will trigger the output of the pulse or pulse sequence. | |
◆ TRTCtrlModes
| enum TRTCtrlModes |
◆ TRTProgOpCodes
| enum TRTProgOpCodes |
Defines valid RTProg OpCodes.
| Enumerator | |
|---|---|
| rtctrlProgNop | Do nothing. |
| rtctrlProgSetDigout | Set digital outputs. |
| rtctrlProgWaitDigin | Wait for digital inputs. |
| rtctrlProgWaitClocks | Wait for n clocks. |
| rtctrlProgJumpLoc | Jump to location. |
| rtctrlProgTriggerSet | Set internal trigger signal of the sensor controller. |
| rtctrlProgTriggerReset | Reset internal trigger signal of the sensor controller. |
| rtctrlProgExposeSet | Set internal expose signal of the sensor controller. |
| rtctrlProgExposeReset | Reset internal expose signal of the sensor controller. |
| rtctrlProgFrameNrReset | Reset internal sensor frame counter. |
| rtctrlProgJumpLocOnZero | Jump to location if a certain register contains zero. |
| rtctrlProgJumpLocOnNotZero | Jump to location if a certain register differs from zero. |
| rtctrlProgRegisterSet | Set a registers value. |
| rtctrlProgRegisterAdd | Add a constant value to a register. |
| rtctrlProgRegisterSub | Subtract a constant value from a register. |
◆ TScanClock
| enum TScanClock |
Analogue grabbers generate its scan clock on different ways (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | |
|---|---|
| scAuto | The cameras clock signal is used.
If the property pixelClockOutput in the camera description is either set to ceseFallingEdge or ceseRisingEdge. Otherwise scAnalogue is used for mvTITAN-RGB and mvTITAN-G1 devices and scDigital for mvGAMMA-G devices. Other devices currently do not support this feature. |
| scAnalogue | The scan clock is generated by genlocking on horizontal sync.(HD) signal.
ADVANTAGES:
DISADVANTAGES:
|
| scDigital | The scan clock is generated digitally.
ADVANTAGE:
DISADVANTAGE:
|
◆ TScanStandard
| enum TScanStandard |
Defines valid scan modes for standard cameras (deprecated.
- Deprecated
- Beginning with the release of 3.0.0 of Impact Acquire everything specifically related to frame grabber boards will be considered as deprecated and might be removed without further notice!
| Enumerator | |
|---|---|
| ssITU601 | 720 x 576 Pixels for 50 Hz standard cameras, 720 x 480 Pixels for 60 Hz standard cameras.
|
| ssSquare | 768 x 576 Pixels for 50 Hz standard cameras, 640 x 480 Pixels for 60 Hz standard cameras.
|
| ssUser | The user can define scan rate and camera AOI.
|
◆ TTriggerMoment
| enum TTriggerMoment |
◆ TVirtualDeviceImageType
Defines valid image types used when capturing data from a certain directory.
These enums may be 'ored' together.
| Enumerator | ||
|---|---|---|
| vditNone | 0x00000000 | Will capture none of the recognized image formats. |
| vditBMP | 0x000000001 | Will capture BMP files. |
| vditPGM | 0x000000002 | Will capture PGM files. |
| vditPNG | 0x000000004 | Will capture PNG files.
|
| vditJPG | 0x000000008 | Will capture JPG files.
|
| vditTIFF | 0x000000010 | Will capture TIFF files.
|
| vditALL | vditBMP | vditPGM | vditPNG | vditJPG | vditTIFF | Will capture all supported image formats. |
◆ TVirtualDeviceTestMode
Defines valid test modes for virtual devices.
| Enumerator | |
|---|---|
| vdtmMovingRGBx888PackedImage | Will generate a moving test pattern with pixel format ibpfRGBx888Packed. |
| vdtmMovingRGB888PackedImage | Will generate a moving test pattern with pixel format ibpfRGB888Packed. |
| vdtmMovingRGBx888PlanarImage | Will generate a moving test pattern with pixel format ibpfRGBx888Planar. |
| vdtmMovingMonoRamp | Will generate a moving horizontal test pattern with a mono pixel format. |
| vdtmMovingYUV422PackedRamp | Will generate a moving test pattern with pixel format ibpfYUV422Packed or ibpfYUV422_10Packed depending on the value of the 'ChannelBitDepth' property. |
| vdtmMovingYUV422PlanarRamp | Will generate a moving test pattern with pixel format ibpfYUV422Planar. |
| vdtmMovingRGB101010PackedImage | Will generate a moving test pattern with pixel format ibpfRGB101010Packed. |
| vdtmMovingRGB121212PackedImage | Will generate a moving test pattern with pixel format ibpfRGB121212Packed. |
| vdtmMovingRGB141414PackedImage | Will generate a moving test pattern with pixel format ibpfRGB141414Packed. |
| vdtmMovingRGB161616PackedImage | Will generate a moving test pattern with pixel format ibpfRGB161616Packed. |
| vdtmMovingBayerDataRamp | Will generate a moving Bayer test pattern. |
| vdtmBayerWhiteBalanceTestImage | Will generate a still Bayer test pattern that can be used for white balancing. |
| vdtmImageDirectory | Will capture images from a user supplied directory. |
| vdtmLeakyPixelTestImageMono8Bayer | Will generate a still 8 bit Bayer test pattern for leaky pixel calibration. |
| vdtmMovingYUV422_UYVYPackedRamp | Will generate a moving test pattern with pixel format ibpfYUV422_UYVYPacked or ibpfYUV422_UYVY_10Packed depending on the value of the 'ChannelBitDepth' property. |
| vdtmHorizontalMonoRamp | Will generate a horizontal mono ramp. |
| vdtmVerticalMonoRamp | Will generate a vertical mono ramp. |
| vdtmMovingVerticalMonoRamp | Will generate a moving vertical mono ramp. |
| vdtmHorizontalMono12Packed_V2Ramp | Will generate a horizontal mono ramp with pixel format ibpfMono12Packed_V2. |
| vdtmMovingBGR888PackedImage | Will generate a moving test pattern with pixel format ibpfBGR888Packed. |
| vdtmMovingYUV444PackedRamp | Will generate a moving test pattern with pixel format ibpfYUV444Packed or ibpfYUV444_10Packed depending on the value of the 'ChannelBitDepth' property. |
| vdtmMovingYUV444_UYVPackedRamp | Will generate a moving test pattern with pixel format ibpfYUV444_UYVPacked or ibpfYUV444_UYV_10Packed depending on the value of the 'ChannelBitDepth' property. |
| vdtmMovingBGRPacked_V2Image | Will generate a moving test pattern with pixel format ibpfBGR101010Packed_V2. |
| vdtmEmptyMonoBuffer | Will just allocate but not initialize a mono buffer. |
| vdtmHorizontalMono12Packed_V1Ramp | Will generate a horizontal mono ramp with pixel format ibpfMono12Packed_V1.
|
| vdtmHorizontalBayer12Packed_V1Ramp | Will generate a horizontal Bayer ramp with pixel format ibpfMono12Packed_V1.
|
| vdtmHorizontalBayer12Packed_V2Ramp | Will generate a horizontal Bayer ramp with pixel format ibpfMono12Packed_V2.
|
| vdtmMovingYUV411_UYYVYY_PackedRamp | Will generate a moving test pattern with pixel format ibpfYUV411_UYYVYY_Packed.
|
| vdtmMovingRGB888PlanarImage | Will generate a moving test pattern with pixel format ibpfRGB888Planar.
|
| vdtmHotAndColdPixelTestImageBayer | Will generate a still Bayer test pattern for hot and cold pixel calibration.
|
| vdtmHotAndColdPixelTestImageRGB888Packed | Will generate a still RGB8 test pattern for hot and cold pixel calibration.
|