Loading...
Searching...
No Matches
NVIDIA Jetson™ AGX Xavier
General
| CPU | NVIDIA Carmel ARMv8.2 @ 2.26GHz |
| Cores | 8 |
| RAM | 32GB |
| USB2.0 Interfaces | 4 |
| USB3.1 Interfaces | 3 |
| Ethernet | 10/100/1000 MBit |
| PCIe | 1x8 + 1x4 + 1x2 + 2x1 Gen 4.0 |
- Note
- The above table describes the specification of the NVIDIA Jetson™ AGX Xavier Developer Kit.
- The following tests were conducted on JetPack 4.6.0.
Test Setup

Additional Settings
Increasing the USB kernel buffer memory
Please refer to Increasing Kernel memory to learn about how to calculate a suitable USB kernel buffer memory for your application. Normally, for a single-camera application, a value of 256 MB should be adequate. To increase the value permanently on NVIDIA Jetson™ platforms, append the calculated usbcore.usbfs_memory_mb as boot parameter in /boot/extlinux/extlinux.conf to "APPEND", e.g.:
APPEND ${cbootargs} usbcore.usbfs_memory_mb=256 Disabling USB autosuspend mode
In some cases the operating system might auto-suspend the USB device to save power. This might result in data loss during the acquisition sometimes. To permanently disable this power saving mode, append usbcore.autosuspend=-1 as boot parameter in /boot/extlinux/extlinux.conf to "APPEND", e.g.:
APPEND ${cbootargs} usbcore.autosuspend=-1- See also
Benchmarks
The following tests have been performed using different de-Bayering scenarios to achieve the max. FPS while maintaining 0 lost images. The CPU load during the acquisition is also documented below.
Scenarios that have been tested are listed as follows:
- When de-Bayering is carried out on the camera: The camera delivers RGB8 image data to the host system. This setting results in a lower CPU load but a lower frame rate.
- When de-Bayering is carried out on the host system: The camera delivers Bayer8 image data to the host system. The Bayer8 image data then get de-Bayered to RGB8 format on the host system. This setting results in a higher frame rate but a higher CPU load as well.
- When no de-Bayering is performed: The camera delivers Bayer8 image data to the host system. No de-Bayering is performed. This settings results in a lower CPU load and a higher frame rate. The behavior is identical to monochrome cameras.
| Camera | Resolution | Pixel Format | Frame Rate [Frames/s] | Bandwidth [MB/s] | CPU Load |
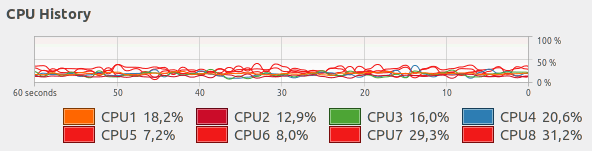
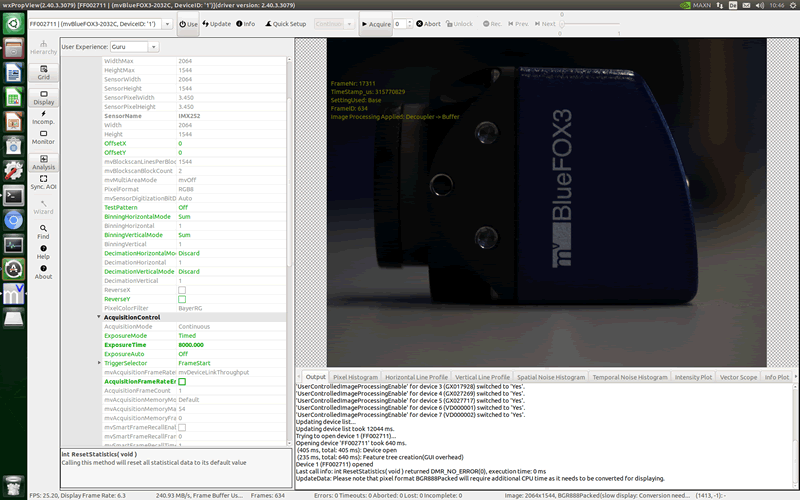
| mvBlueFOX3-2032C | 2064 x 1544 | RGB8 (on camera) → RGB8 (on host) | 25.20 | 240.93 | ~18% |
 | |||||
 | |||||
| Camera | Resolution | Pixel Format | Frame Rate [Frames/s] | Bandwidth [MB/s] | CPU Load |
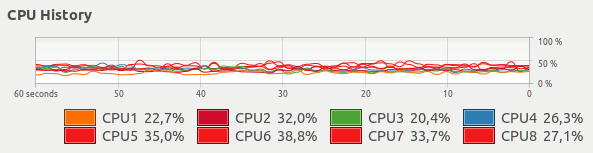
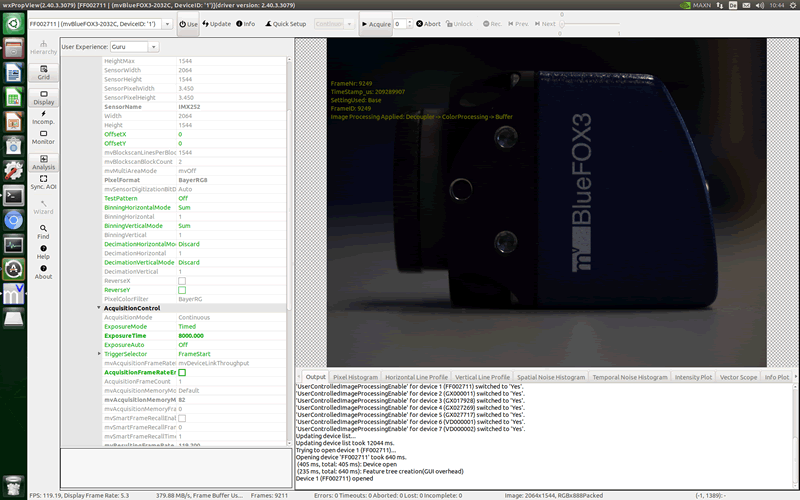
| mvBlueFOX3-2032C | 2064 x 1544 | BayerRG8 (on camera) → RGB8 (on host) | 119.19 | 379.88 | ~30% |
 | |||||
 | |||||
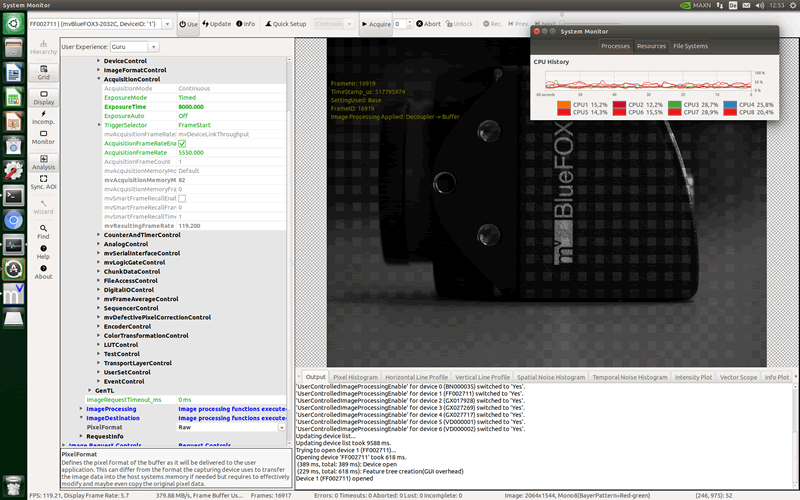
| Camera | Resolution | Pixel Format | Frame Rate [Frames/s] | Bandwidth [MB/s] | CPU Load |
| mvBlueFOX3-2032C | 2064 x 1544 | BayerRG8 (on camera) → BayerRG8/Raw (on host) | 119.21 | 379.86 | ~20% |
 | |||||